基于电鱼 AI 工控机的塔吊与升降机安全监测方案——实时采集传感器数据,AI智能判断异常并报警
一、行业痛点
在塔吊和升降机安全管理中,普遍存在以下问题:
- ⚙️ 缺乏实时监测系统:传统塔吊仅依赖机械限位或声光报警;
- 📈 数据分散:传感器数据无法集中分析,缺乏趋势判断;
- ⏱️ 人工巡检滞后:往往在事故发生后才发现异常;
- 🌐 网络依赖强:云端方案延迟高,不适合实时控制。
✅ 解决思路:
使用 电鱼 AI 工控机 部署在设备侧,
实时采集多维度传感器数据,
在本地执行AI算法,完成实时识别、预警与数据上报。
二、核心硬件平台
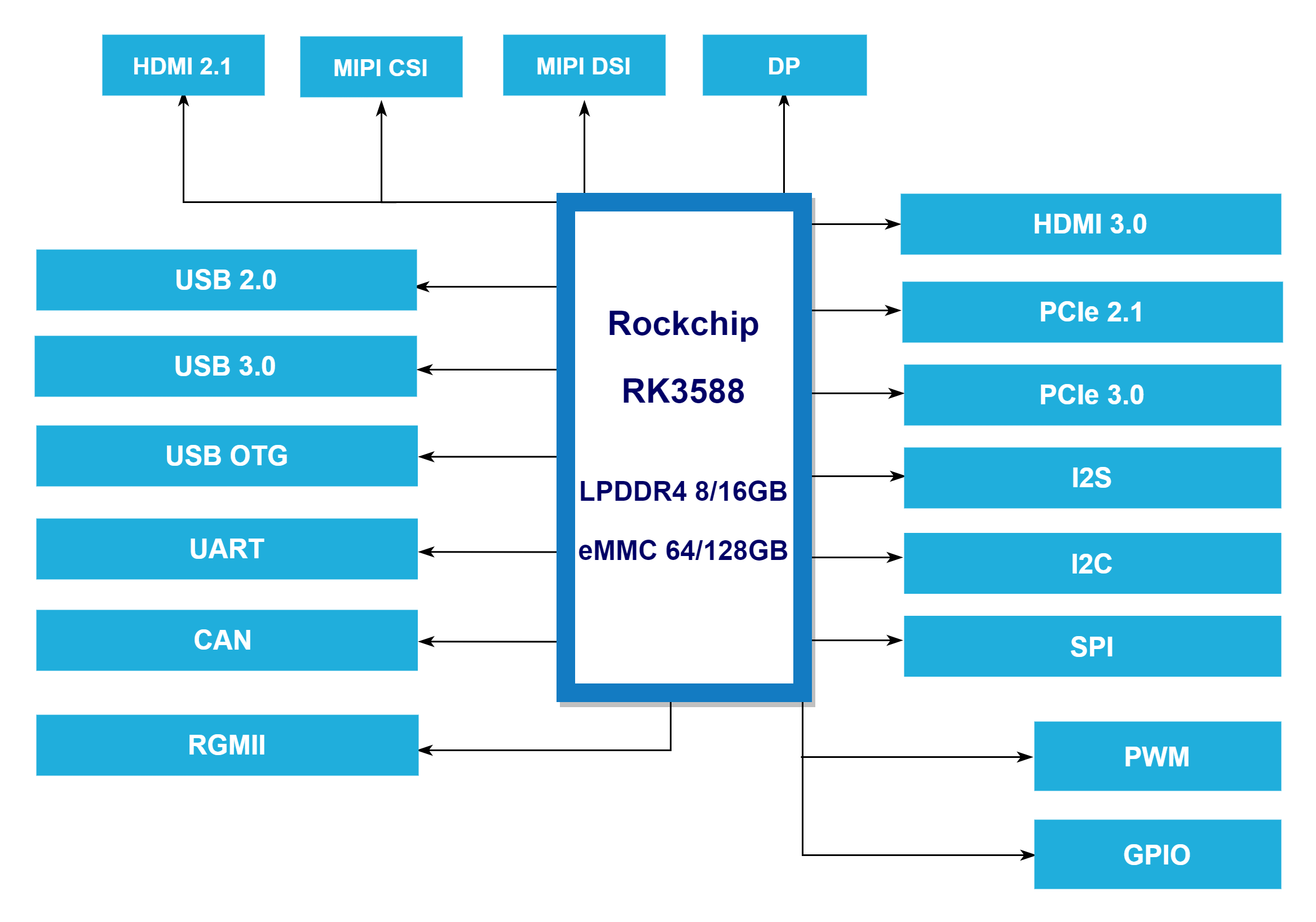
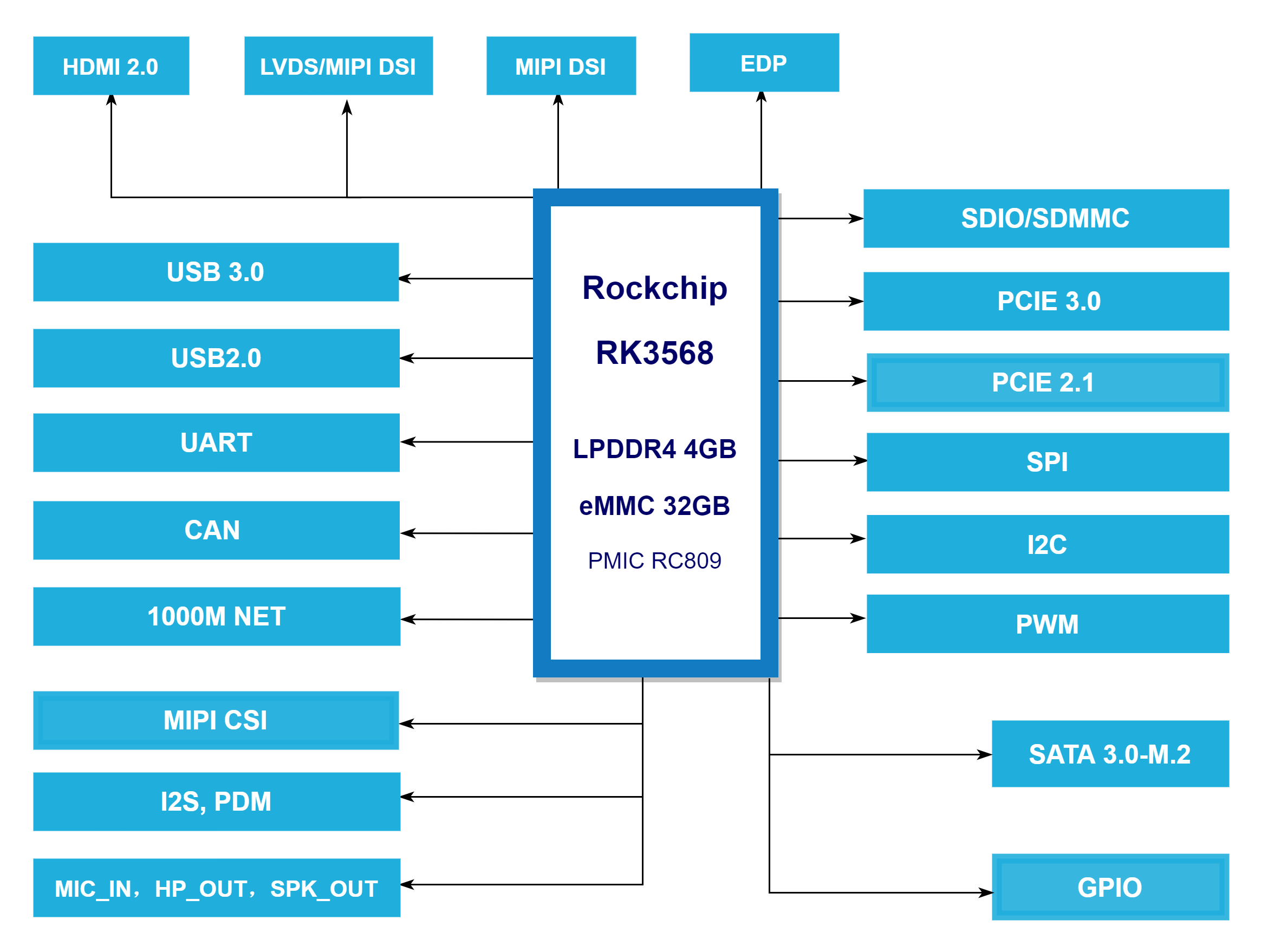
参数 | 电鱼 EFISH-RK3588 工控机 | 电鱼 EFISH-RK3568 工控机 |
CPU | 8核 Cortex-A76 + A55 | 4核 Cortex-A55 |
NPU算力 | 6 TOPS | 1 TOPS |
接口 | RS485 / CAN / Ethernet / GPIO | RS485 / CAN / Ethernet / GPIO |
存储 | eMMC + SSD | eMMC + TF卡 |
系统 | Linux 5.10 / Ubuntu | Linux 5.10 / Debian |
特点 | 高算力AI推理 / 多传感器接入 / 工业宽温设计 | 低功耗 / 稳定性高 / 成本优 |
⚙️ 两款产品均可作为边缘计算节点,
实现多路传感器数据采集与AI算法推理,
适合塔吊、升降机等现场部署环境。
三、系统功能模块
模块 | 功能 | 技术说明 |
数据采集模块 | 实时采集传感器数据 | RS485 / CAN / Modbus |
AI判断模块 | 本地AI识别异常状态(倾斜、超载) | LSTM模型 + 规则引擎 |
报警输出模块 | 触发声光报警 / 断电保护 | GPIO / 继电器输出 |
数据记录模块 | 本地存储与日志管理 | SQLite / CSV缓存 |
通信上报模块 | 上传结果与状态信息 | MQTT / HTTP / 4G |
远程维护模块 | OTA升级 / 参数远程调整 | RESTful接口 |
四、AI异常判断逻辑
angle = get_sensor("tilt_angle")load = get_sensor("load_weight")vibration = get_sensor("vibration_rms")# AI模型综合分析风险等级risk_score = ai_model.predict([angle, load, vibration])if risk_score > 0.8:trigger_alarm("高危异常!停止运行")upload_event(level="High", data=[angle, load, vibration])elif risk_score > 0.6:log_event("轻微异常,建议巡检")💡 通过融合传感器多维特征(角度+载荷+振动),
AI模型能更准确判断设备风险,减少误报率。
五、报警与安全控制机制
事件类型 | 条件触发 | 响应策略 |
倾斜报警 | 倾角 > 6° | 声光报警 + 停机保护 |
超载报警 | 实际载荷 > 额定载荷 110% | 输出继电器信号停止操作 |
振动异常 | RMS值异常波动 | 发送运维提示 / 上传事件 |
通信中断 | 数据丢失 > 3次 | 离线缓存 + 重连上报 |
六、方案优势
✅ 多维监测:角度、振动、载荷数据同步分析;
✅ AI智能识别:比阈值报警更精准,减少误报;
✅ 实时反应:边缘端本地分析,毫秒级响应;
✅ 独立运行:断网可本地报警与缓存;
✅ 工业级稳定性:支持宽温运行(-20℃~75℃);
✅ 远程管理:支持OTA算法升级与参数下发。
七、实施流程
1️⃣ 部署传感器至塔吊关键结构(臂架、吊钩、基座);
2️⃣ 安装电鱼RK3588工控机并接入数据采集模块;
3️⃣ 部署AI判断算法模型;
4️⃣ 联调报警逻辑与监控中心;
5️⃣ 启用远程管理与日志上报功能;
系统支持模块化扩展,可接入风速、电流、视频监控等多维信息,实现更全面的安全管控。
八、典型应用场景
- 🏗️ 塔吊姿态实时监测与倾覆预警
- 🚧 施工升降机载荷与运行状态分析
- ⚙️ 吊装设备振动与疲劳检测
- 💡 施工现场多设备安全综合预警系统