Opencv(八) :ROI 切割
文章目录
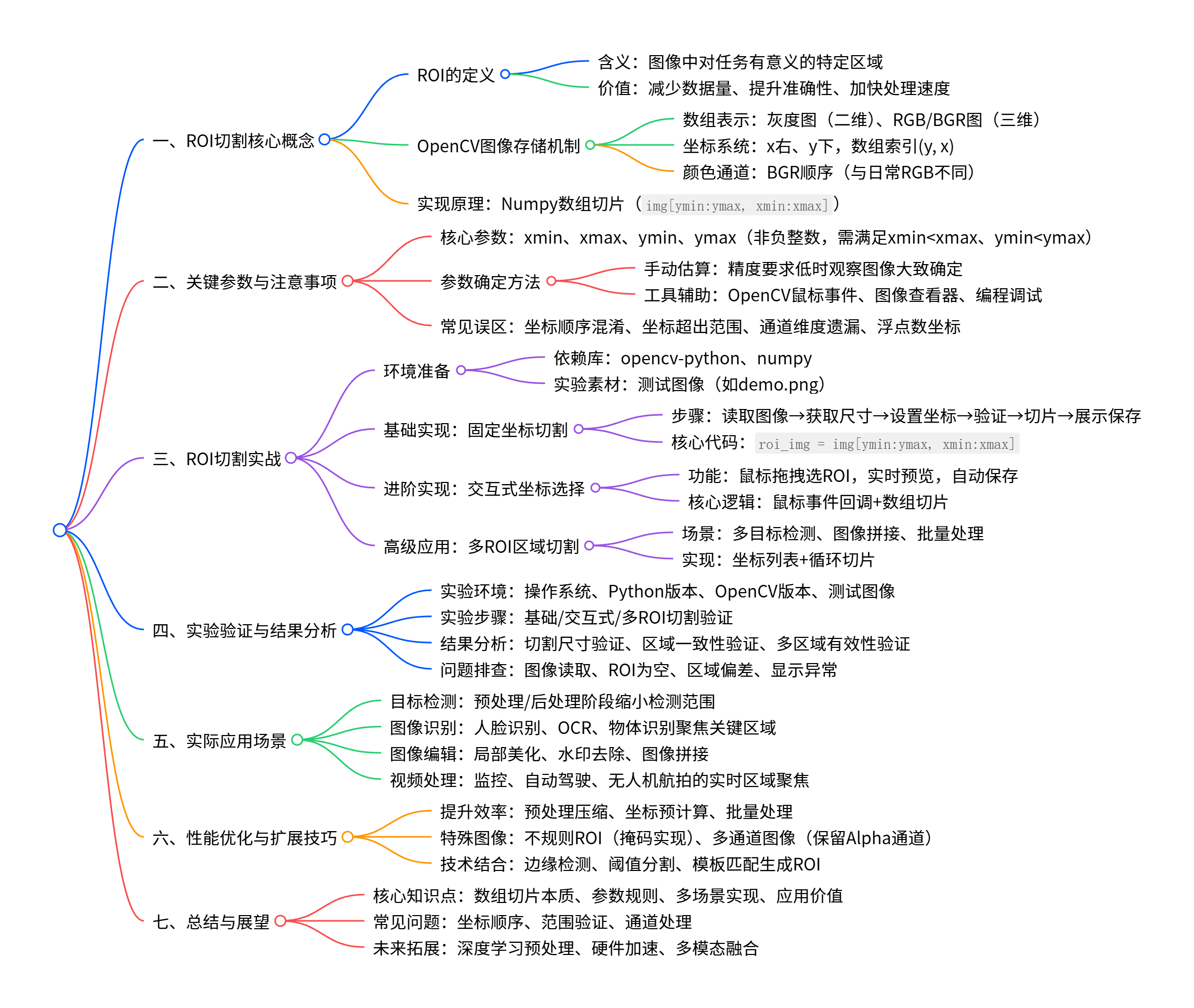
- 思维导图
- 前言
- 一、ROI切割核心概念
- 1.1 ROI的定义
- 1.2 OpenCV中的图像存储机制
- 1.2.1 图像的数组表示
- 1.2.2 坐标系统规则
- 1.2.3 颜色通道顺序
- 1.3 ROI切割的实现原理
- 二、ROI切割的关键参数与注意事项
- 2.1 核心参数定义
- 2.2 参数确定方法
- 2.2.1 手动估算
- 2.2.2 工具辅助
- 2.3 常见误区
- 三、ROI切割实战(Python+OpenCV)
- 3.1 环境准备
- 3.1.1 依赖库安装
- 3.1.2 实验素材
- 3.2 基础实现:固定坐标切割
- 3.2.1 完整代码
- 3.2.2 代码解析
- 3.3 进阶实现:交互式坐标选择
- 3.3.1 完整代码
- 3.3.2 功能说明
- 3.4 高级应用:多ROI区域切割
- 3.5 应用场景
- 四、实验验证与结果分析
- 4.1 实验环境
- 4.2 实验步骤
- 4.3 结果分析
- 4.3.1 基础实现结果
- 4.3.2 交互式实现结果
- 4.3.3 多ROI实现结果
- 4.4 常见问题排查
- 五、ROI切割的实际应用场景
- 5.1 目标检测
- 5.2 图像识别
- 5.3 图像编辑
- 5.4 视频处理
- 六、性能优化与扩展技巧
- 6.1 提升切割效率
- 6.2 处理特殊图像
- 6.2.1 不规则ROI切割
- 6.2.2 多通道图像处理
- 6.3 与其他技术结合
- 6.4 具体实例
- 七、总结与展望
思维导图
前言
在计算机视觉领域,图像数据往往包含大量冗余信息。例如检测人脸中的眼睛时,背景、头发等区域的像素对检测结果毫无帮助,反而会增加计算量、拖慢处理速度。ROI(Region of Interest,感兴趣区域)切割技术正是为解决这一问题而生——通过精准提取图像中关键区域,忽略无关部分,实现数据降维与效率提升。本文将从原理、实现步骤、代码实战到实验验证,全方位拆解ROI切割技术,适合计算机视觉入门者系统学习。
一、ROI切割核心概念
1.1 ROI的定义
ROI(Region of Interest)即感兴趣区域,指从图像中截取的、对当前任务有意义的特定区域。例如:
- 人脸识别任务中,截取人脸区域而非整张图像;
- 文字识别任务中,提取包含文字的区域而非背景;
- 目标检测任务中,聚焦待检测物体所在的局部范围。
其核心价值在于:
- 减少数据量:仅处理关键区域,降低存储和计算负担;
- 提升准确性:排除背景干扰,避免无关像素影响检测/识别结果;
- 加快处理速度:缩小处理范围,提升算法实时性。
1.2 OpenCV中的图像存储机制
ROI切割的实现依赖于OpenCV对图像的存储方式,需先明确以下核心知识点:
1.2.1 图像的数组表示
OpenCV读取的图像会以Numpy数组形式存储,不同通道图像的数组维度不同:
- 灰度图(单通道):二维数组
(height, width),每个元素表示像素灰度值(0-255); - RGB/BGR图(三通道):三维数组
(height, width, channels),第三个维度对应3个颜色通道。
1.2.2 坐标系统规则
OpenCV的坐标系统与数学中的二维坐标存在差异,需重点注意:
- x轴正方向:水平向右;
- y轴正方向:垂直向下;
- 图像左上角为坐标原点
(0, 0); - 数组索引顺序:
(y, x),即先行数(高度)后列数(宽度),与日常习惯的(x, y)相反。
例如:数组 img[50, 100] 表示“y=50行、x=100列”的像素,对应图像中“横向100、纵向50”的位置。
1.2.3 颜色通道顺序
OpenCV默认以BGR(蓝、绿、红)顺序存储三通道图像,而日常使用的图像(如PNG、JPG)多为RGB格式。这一差异在后续图像显示、处理时需注意,但对ROI切割的数组切片操作无直接影响。
1.3 ROI切割的实现原理
ROI切割的本质是Numpy数组的切片操作——通过指定数组的行、列范围,截取对应区域的像素数据,形成新的图像数组。
核心逻辑:
- 确定ROI区域的坐标范围(xmin, xmax, ymin, ymax);
- 基于OpenCV的坐标规则,通过数组切片
img[ymin:ymax, xmin:xmax]截取区域; - 切片后的数组即为ROI图像,可直接用于后续处理。
注意:切片操作不会修改原始图像,而是生成新的数组副本,确保原始数据的完整性。
二、ROI切割的关键参数与注意事项
2.1 核心参数定义
ROI切割需明确4个关键坐标参数,其定义如下:
xmin:ROI区域的左边界x坐标(最小x值);xmax:ROI区域的右边界x坐标(最大x值);ymin:ROI区域的上边界y坐标(最小y值);ymax:ROI区域的下边界y坐标(最大y值)。
参数约束:
- 所有坐标值必须为非负整数;
- 需满足
xmin < xmax且ymin < ymax,否则切片结果为空; - 坐标范围不能超出图像的宽度(x≤width)和高度(y≤height),否则会引发索引错误。
2.2 参数确定方法
2.2.1 手动估算
适用于对精度要求不高的场景,通过观察图像大致确定坐标范围。例如:一张宽度400px、高度300px的图像,若要截取中间区域,可大致设置 xmin=100, xmax=300, ymin=50, ymax=250。
2.2.2 工具辅助
精准确定坐标的推荐方式,常用工具包括:
- OpenCV自带函数:通过鼠标事件获取坐标;
- 图像查看器:如Paint、Photoshop,打开图像后查看像素坐标;
- 编程调试:通过打印图像尺寸
img.shape,结合可视化工具逐步调整参数。
2.3 常见误区
- 混淆坐标顺序:将
(x, y)与数组索引(y, x)颠倒,导致截取区域偏差; - 坐标超出范围:未先获取图像尺寸就设置参数,引发
IndexError; - 通道维度遗漏:三通道图像切片时忘记保留通道维度,导致生成灰度图;
- 浮点数坐标:坐标必须为整数,若通过计算得到浮点数,需先转换为整数(如
int()强制转换)。
三、ROI切割实战(Python+OpenCV)
3.1 环境准备
3.1.1 依赖库安装
需安装OpenCV和Numpy,命令如下:
pip install opencv-python numpy
3.1.2 实验素材
准备一张测试图像(推荐PNG格式,避免后缀修改导致的兼容性问题),命名为 demo.png,放置在代码运行目录下。
3.2 基础实现:固定坐标切割
3.2.1 完整代码
import cv2
import numpy as npdef basic_roi_cut():# 1. 读取图像img = cv2.imread("demo.png")if img is None:print("错误:未找到图像文件,请检查路径是否正确")return# 2. 获取图像尺寸(height, width, channels)height, width, channels = img.shapeprint(f"原始图像尺寸:高度={height}px,宽度={width}px,通道数={channels}")# 3. 设置ROI坐标(根据实际图像调整)xmin = 150 # 左边界xmax = 270 # 右边界ymin = 150 # 上边界ymax = 290 # 下边界# 4. 验证坐标有效性if xmin < 0 or xmax > width or ymin < 0 or ymax > height:print("警告:坐标超出图像范围,将自动调整至有效范围")xmin = max(0, xmin)xmax = min(width, xmax)ymin = max(0, ymin)ymax = min(height, ymax)# 5. ROI切割(核心:Numpy数组切片)roi_img = img[ymin:ymax, xmin:xmax]# 6. 查看ROI图像尺寸roi_height, roi_width, roi_channels = roi_img.shapeprint(f"ROI图像尺寸:高度={roi_height}px,宽度={roi_width}px,通道数={roi_channels}")# 7. 显示结果cv2.imshow("Original Image", img)cv2.imshow("ROI Image", roi_img)# 8. 保存结果cv2.imwrite("roi_result.png", roi_img)print("ROI图像已保存为 roi_result.png")# 9. 等待按键关闭窗口cv2.waitKey(0)cv2.destroyAllWindows()if __name__ == "__main__":basic_roi_cut()
3.2.2 代码解析
- 图像读取:
cv2.imread()读取图像,返回Numpy数组;若返回None,说明文件路径错误; - 尺寸获取:
img.shape返回(height, width, channels),用于验证坐标范围; - 坐标验证:避免坐标超出图像范围,提升代码鲁棒性;
- ROI切割:
img[ymin:ymax, xmin:xmax]是核心操作,切片范围为“y从ymin到ymax-1,x从xmin到xmax-1”; - 结果展示与保存:
cv2.imshow()显示原始图像和ROI图像,cv2.imwrite()保存切割结果。
3.3 进阶实现:交互式坐标选择
通过鼠标事件实现交互式选择ROI区域,无需手动设置坐标,更灵活实用。
3.3.1 完整代码
import cv2
import numpy as npclass InteractiveROICutter:def __init__(self):self.img = Noneself.temp_img = Noneself.roi_start = (0, 0) # 起始坐标 (x, y)self.roi_end = (0, 0) # 结束坐标 (x, y)self.is_selecting = False # 是否正在选择ROIdef mouse_callback(self, event, x, y, flags, param):# 鼠标左键按下:记录起始坐标,开始选择if event == cv2.EVENT_LBUTTONDOWN:self.roi_start = (x, y)self.is_selecting = Trueself.temp_img = self.img.copy() # 复制原始图像,避免绘制时修改原图# 鼠标移动:实时绘制选择框elif event == cv2.EVENT_MOUSEMOVE and self.is_selecting:self.temp_img = self.img.copy()cv2.rectangle(self.temp_img, self.roi_start, (x, y), (0, 255, 0), 2) # 绿色矩形框# 鼠标左键释放:记录结束坐标,停止选择elif event == cv2.EVENT_LBUTTONUP:self.roi_end = (x, y)self.is_selecting = False# 确保起始坐标小于结束坐标xmin = min(self.roi_start[0], self.roi_end[0])xmax = max(self.roi_start[0], self.roi_end[0])ymin = min(self.roi_start[1], self.roi_end[1])ymax = max(self.roi_start[1], self.roi_end[1])# 切割ROIself.roi_img = self.img[ymin:ymax, xmin:xmax]print(f"选择的ROI坐标:xmin={xmin}, xmax={xmax}, ymin={ymin}, ymax={ymax}")# 显示结果cv2.rectangle(self.temp_img, (xmin, ymin), (xmax, ymax), (0, 0, 255), 2) # 红色最终框cv2.imshow("Selected ROI", self.roi_img)cv2.imwrite("interactive_roi_result.png", self.roi_img)print("交互式ROI图像已保存为 interactive_roi_result.png")def run(self):# 读取图像self.img = cv2.imread("demo.png")if self.img is None:print("错误:未找到图像文件,请检查路径是否正确")return# 创建窗口并绑定鼠标事件cv2.namedWindow("Interactive ROI Selection")cv2.setMouseCallback("Interactive ROI Selection", self.mouse_callback)# 显示窗口,等待操作print("操作说明:在图像上按住鼠标左键拖动选择ROI区域,释放左键完成选择")while True:cv2.imshow("Interactive ROI Selection", self.temp_img if self.temp_img is not None else self.img)# 按下ESC键退出if cv2.waitKey(1) & 0xFF == 27:breakcv2.destroyAllWindows()if __name__ == "__main__":cutter = InteractiveROICutter()cutter.run()
3.3.2 功能说明
- 交互式选择:通过鼠标拖拽绘制矩形框,直观选择ROI区域;
- 实时预览:拖动过程中实时显示选择框,便于调整范围;
- 自动处理:释放鼠标后自动计算坐标(确保xmin<xmax、ymin<ymax),并完成切割;
- 结果保存:自动保存ROI图像,同时打印坐标信息,便于后续复用。
3.4 高级应用:多ROI区域切割
在实际场景中,可能需要同时提取多个感兴趣区域(如一张图像中的多个人脸、多个物体),可通过循环或坐标列表实现。
3.5 应用场景
- 多目标检测:同时提取多个待检测物体的区域,分别输入检测模型;
- 图像拼接:切割多个局部区域,后续进行拼接合成;
- 批量处理:对图像中多个重复结构的区域进行统一处理(如文字区域提取)。
四、实验验证与结果分析
4.1 实验环境
- 操作系统:Windows 10/11(或Linux、macOS);
- Python版本:3.7-3.11;
- OpenCV版本:4.5.0及以上;
- 测试图像:建议使用分辨率为400×300px以上的彩色图像,包含明显的前景和背景区域。
4.2 实验步骤
- 准备测试图像
demo.png,放置在代码目录; - 运行基础实现代码,使用默认坐标
xmin=150, xmax=270, ymin=150, ymax=290切割ROI; - 观察原始图像与ROI图像的差异,验证切割效果;
- 运行交互式实现代码,手动选择不同ROI区域,对比自动保存的结果;
- 运行多ROI实现代码,查看多个区域的切割效果。
4.3 结果分析
4.3.1 基础实现结果
- 若输出日志显示“ROI图像尺寸:高度=140px,宽度=120px”(因
ymax-ymin=140,xmax-xmin=120),说明切割成功; - 打开
roi_result.png,应能看到原始图像中指定坐标范围内的局部区域,无背景干扰。
4.3.2 交互式实现结果
- 拖动鼠标时,图像上会显示绿色动态矩形框,释放后显示红色最终框;
interactive_roi_result.png中的区域与手动选择的范围完全一致,坐标信息打印在控制台,便于后续复用。
4.3.3 多ROI实现结果
- 目录下生成
multi_roi_1.png、multi_roi_2.png、multi_roi_3.png三个文件; - 每个文件对应一个指定坐标的ROI区域,若坐标设置合理,应能准确提取多个关键区域。
4.4 常见问题排查
- 图像无法读取:检查文件路径是否正确,确保图像格式为OpenCV支持的格式(PNG、JPG、BMP等);
- ROI图像为空:检查坐标是否满足
xmin < xmax和ymin < ymax,若坐标颠倒需调整; - 切割区域偏差:确认坐标顺序是否正确,避免将
(x, y)与(y, x)混淆; - 图像显示异常:三通道图像切割后若显示为灰度图,检查切片操作是否遗漏通道维度(如误写为
img[ymin:ymax, xmin:xmax, 0])。
五、ROI切割的实际应用场景
5.1 目标检测
在目标检测算法(如YOLO、SSD)中,ROI切割用于:
- 预处理阶段:提取可能包含目标的区域,减少检测算法的搜索范围;
- 后处理阶段:对检测到的目标框进行切割,用于进一步的分类或识别。
例如:在行人检测中,先通过ROI切割提取图像中的人体区域,再输入分类模型判断是否为行人,提升检测速度。
5.2 图像识别
- 人脸识别:切割人脸区域,去除头发、背景等干扰,仅对人脸特征进行提取;
- 文字识别(OCR):提取图像中的文字区域,减少背景噪声对识别准确率的影响;
- 物体识别:聚焦待识别物体的局部区域,突出特征细节。
5.3 图像编辑
- 局部美化:仅对图像中的特定区域(如人脸、风景)进行美颜、调色;
- 水印去除:切割包含水印的区域,进行修复或替换;
- 图像拼接:切割多个图像的重叠区域,用于全景图合成。
5.4 视频处理
在实时视频流处理中,ROI切割可显著提升算法实时性:
- 监控视频:仅处理画面中的关键区域(如门口、车道),忽略空旷背景;
- 自动驾驶:提取车道线、交通灯、行人等关键区域,用于路径规划和决策;
- 无人机航拍:聚焦地面特定目标区域,减少高空背景的计算量。
六、性能优化与扩展技巧
6.1 提升切割效率
- 预处理压缩:对高分辨率图像先进行缩放(
cv2.resize()),再切割ROI,减少数据量; - 坐标预计算:提前确定ROI坐标,避免实时计算消耗算力;
- 批量处理:使用Numpy的向量化操作,批量切割多个ROI,替代循环遍历。
6.2 处理特殊图像
6.2.1 不规则ROI切割
若需要提取不规则形状的ROI(如圆形、多边形),可通过掩码(mask)实现:
import cv2
import numpy as npdef irregular_roi_cut():# 读取图像img = cv2.imread("demo.png")height, width = img.shape[:2]# 创建掩码(全黑)mask = np.zeros((height, width), dtype=np.uint8)# 定义不规则区域的顶点(例如三角形)pts = np.array([[150, 100], [250, 100], [200, 200]], np.int32)pts = pts.reshape((-1, 1, 2))# 填充掩码中的不规则区域(白色)cv2.fillPoly(mask, [pts], 255)# 应用掩码,提取不规则ROIroi_img = cv2.bitwise_and(img, img, mask=mask)# 显示结果cv2.imshow("Irregular ROI", roi_img)cv2.imwrite("irregular_roi.png", roi_img)cv2.waitKey(0)cv2.destroyAllWindows()
6.2.2 多通道图像处理
切割透明图像(如PNG)时,需保留Alpha通道(透明度),此时图像数组为四维 (height, width, 4),切片时需包含Alpha通道:
# 读取带Alpha通道的图像
img = cv2.imread("transparent_demo.png", cv2.IMREAD_UNCHANGED)
# 切割ROI(包含Alpha通道)
roi_img = img[ymin:ymax, xmin:xmax, :]
6.3 与其他技术结合
- 边缘检测:先通过Canny边缘检测找到目标轮廓,再根据轮廓生成ROI;
- 阈值分割:通过二值化分割前景和背景,再提取前景区域作为ROI;
- 模板匹配:通过模板匹配找到目标位置,自动生成ROI坐标。
例如:结合边缘检测的ROI提取:
import cv2
import numpy as npdef edge_based_roi():# 读取图像img = cv2.imread("demo.png")gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# Canny边缘检测edges = cv2.Canny(gray, 50, 150)# 查找轮廓contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 选择面积最大的轮廓作为ROImax_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(max_contour)# 切割ROIroi_img = img[y:y+h, x:x+w]# 显示结果cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)cv2.imshow("Contour ROI", roi_img)cv2.imshow("Original with Contour", img)cv2.waitKey(0)cv2.destroyAllWindows()
6.4 具体实例
#这个文件的作用是对图像中的某些区域进行切割的
#导入opencv库方便读取和显示图像
import cv2
#1.读取我们要切割的图像
image_np = cv2.imread('./lena.png')#获取图像的高度和宽度,方便后续进行判断
height,width = image_np.shape[0],image_np.shape[1]
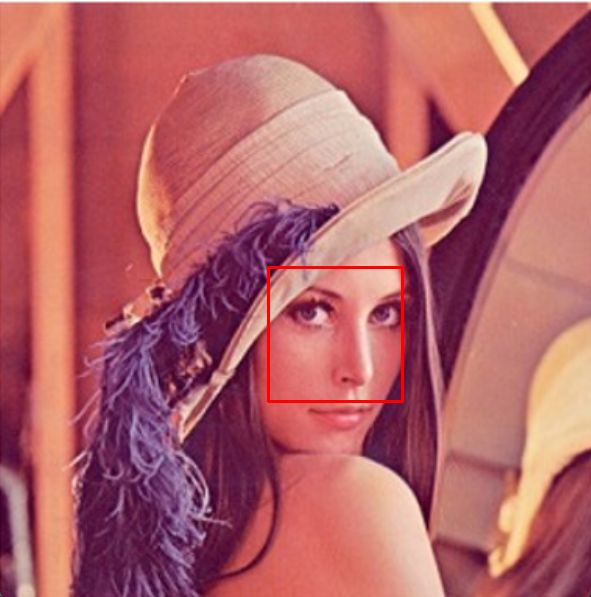
try:#2.切割感兴趣的区域#人为指定要切割的区域x_min,x_max = 270,400y_min,y_max = 270,400#对要切割的区域的范围进行判断if not(x_min >= 0 and x_max <= width and y_min >= 0 and y_max <= height):raise OverflowError("x_min or x_max or y_min or y_max overflow!")#使用rectangle去画一个矩形框,方便我们去调整感兴趣的区域的范围cv2.rectangle(image_np,(x_min-2,y_min-2),(x_max+2,y_max+2),(0,0,255),2)# 对象 范围 左上角 右下角 颜色BGR 线宽#3.使用Numpy数组的切片操作对图像进行切割image_roi = image_np[y_min:y_max,x_min:x_max]#4.显示结果cv2.imshow('image_np',image_np)cv2.imshow('image_roi',image_roi)cv2.waitKey(0)
except Exception as e:print(e)
输出结果为:

七、总结与展望
- ROI切割的本质是Numpy数组切片,依赖于OpenCV的图像存储机制;
- 关键参数为
xmin, xmax, ymin, ymax,需遵循OpenCV的坐标规则; - 实现方式包括固定坐标、交互式选择、多区域切割,适用于不同场景;
- 核心价值是减少数据量、提升效率和准确性,是计算机视觉的基础预处理技术。