【ROS2+相机】在Ubuntu安装realsense-ros
主要参考:https://github.com/IntelRealSense/realsense-ros
安装步骤
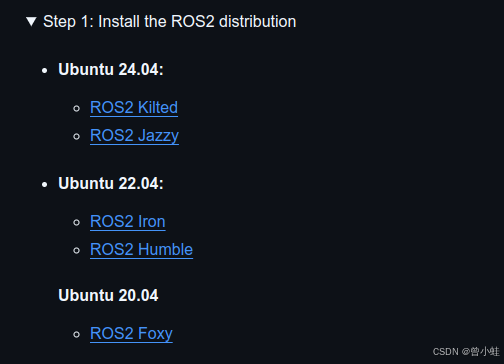
Step 1: Install the ROS2 distribution
Step 2: Install latest Intel® RealSense™ SDK 2.0
Step 3: Install ROS Wrapper for Intel® RealSense™ cameras
1 安装ROS
fishros一键安装脚本
讲解见:《ROS 2机器人开发从入门到实践》1.2.4 在Ubuntu中安装ROS2_哔哩哔哩_bilibili
wget http://fishros.com/install -O fishros && bash fishros
2 RealSense™ SDK 2.0
Nvida Jetson - use the Jetson Installation Guide
Linux: Linux Debian Installation Guide
2.1 以linux为例:
注册服务器的公钥:
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsense.pgp | sudo tee /etc/apt/keyrings/librealsense.pgp > /dev/null
sudo apt-get install apt-transport-https
添加安装列表
echo "deb [signed-by=/etc/apt/keyrings/librealsense.pgp] https://librealsense.intel.com/Debian/apt-repo `lsb_release -cs` main" | \
sudo tee /etc/apt/sources.list.d/librealsense.list
sudo apt-get update
安装内核驱动
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
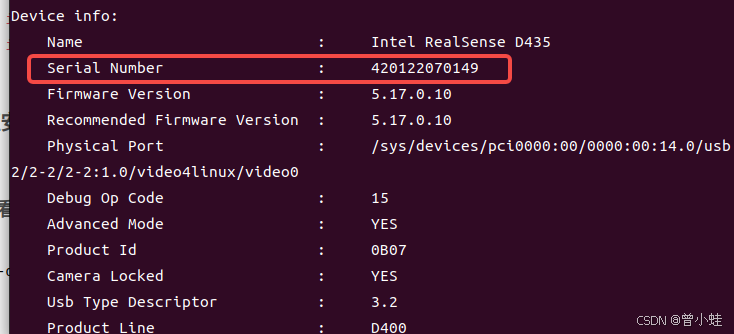
2.2 验证安装
2.2. 1查看设备信息
rs-enumerate-devices
串口号可能在一些
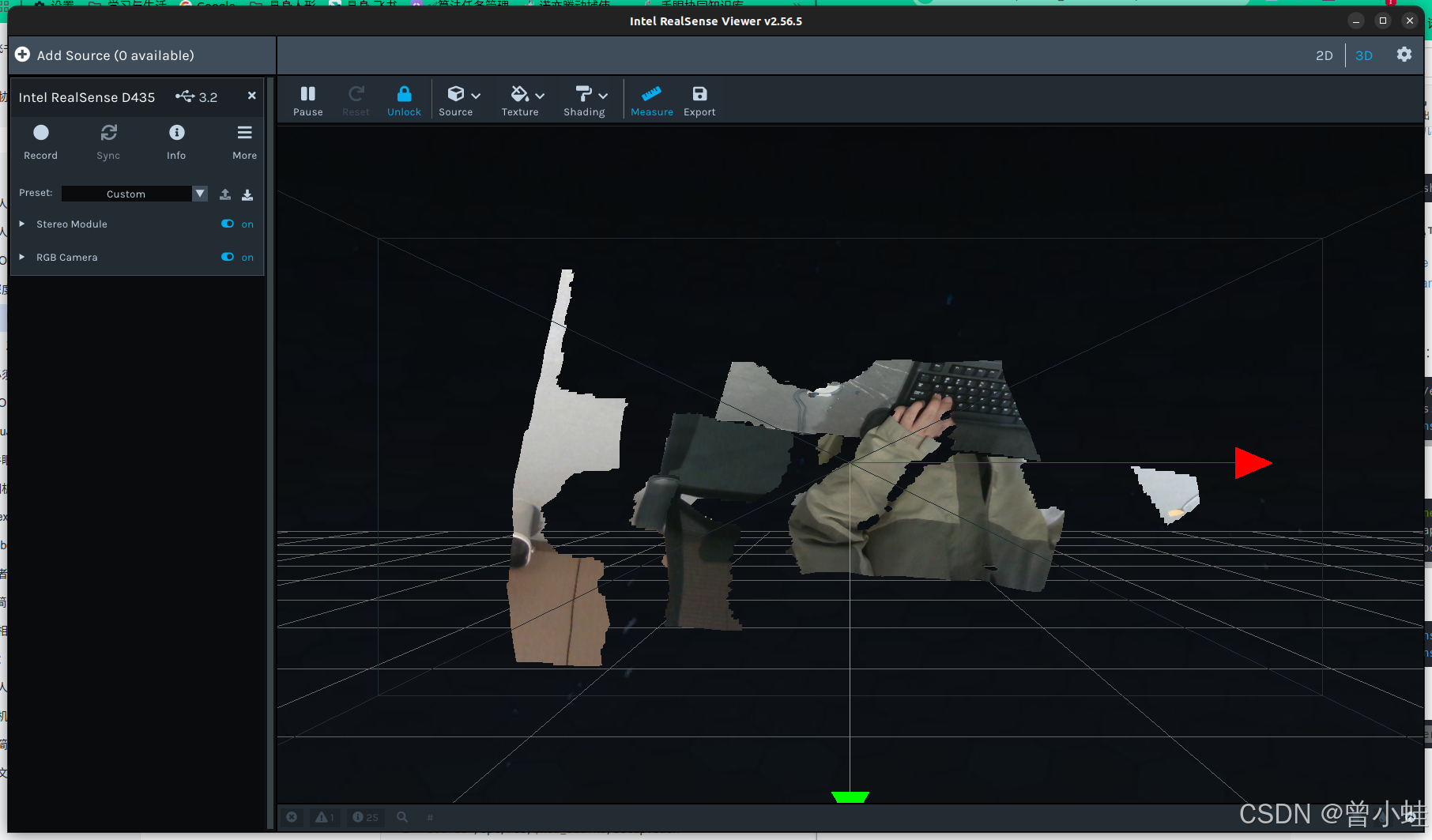
2.2. 2英特尔官方UI
realsense-viewer
3.realsnse-ros
3.1 安装
其中,humble是版本,
sudo apt install ros-humble-realsense2-*
#通用安装法
sudo apt install ros-${ROS_DISTRO}-realsense2-camera
ros的版本有
3.2 使用
https://github.com/IntelRealSense/realsense-ros?tab=readme-ov-file#example
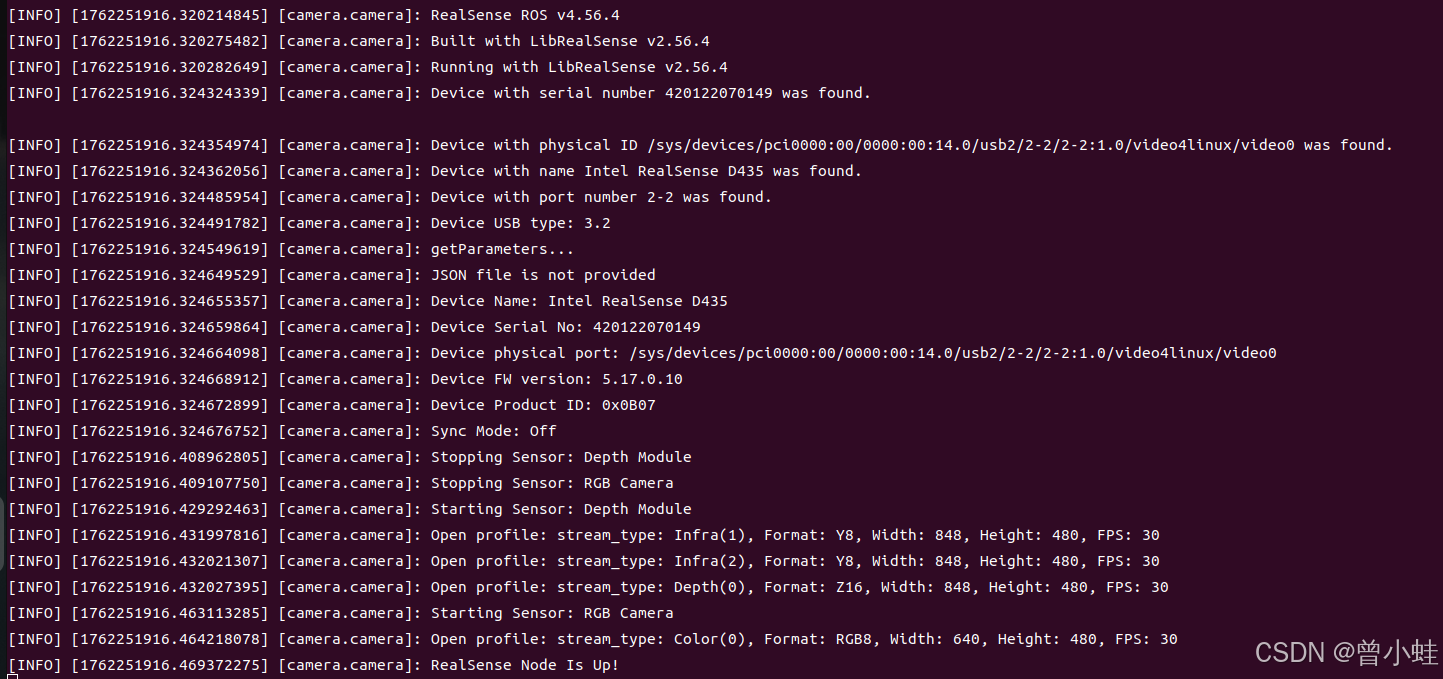
使用ros2 run启动
ros2 run realsense2_camera realsense2_camera_node
#
ros2 run realsense2_camera realsense2_camera_node --ros-args -p enable_color:=false -p spatial_filter.enable:=true -p temporal_filter.enable:=true
# 修改相机命名空间ros2 run realsense2_camera realsense2_camera_node --ros-args -r __node:=D455_1 -r __ns:=/robot1使用realsense启动
ros2 launch realsense2_camera rs_launch.py
ros2 launch realsense2_camera rs_launch.py depth_module.depth_profile:=1280x720x30 pointcloud.enable:=true
3.3 ros2 topic list
~/realsense-ros$ ros2 topic list
/camera/camera/color/camera_info
/camera/camera/color/image_raw
/camera/camera/color/metadata
/camera/camera/depth/camera_info
/camera/camera/depth/image_rect_raw
/camera/camera/depth/metadata
/camera/camera/extrinsics/depth_to_color
/camera/camera/extrinsics/depth_to_infra1
/camera/camera/extrinsics/depth_to_infra2
/camera/camera/infra1/camera_info
/camera/camera/infra1/image_rect_raw
/camera/camera/infra1/metadata
/camera/camera/infra2/camera_info
/camera/camera/infra2/image_rect_raw
/camera/camera/infra2/metadata
/parameter_events
/rosout
/tf_static