智能网联汽车 HD map架构解析
ADAS如何将HD Map数据传输给IVI的Navigation应用?
答: 主要通过ADASIS v3 协议,经由车载以太网,以客户端-服务器模式进行传输。ADAS域控制器是服务器,IVI的Navigation应用是客户端。
谁应该做地图的渲染,显示车道在IVI上?
答: 由IVI系统负责最终的地图渲染和车道显示。 ADAS域只提供结构化的数据,IVI负责将这些数据与其基础地图融合,并利用自身的图形引擎(通常是GPU加速)绘制出来。
下面,我们通过一个详细的流程图来解析整个数据流转过程。
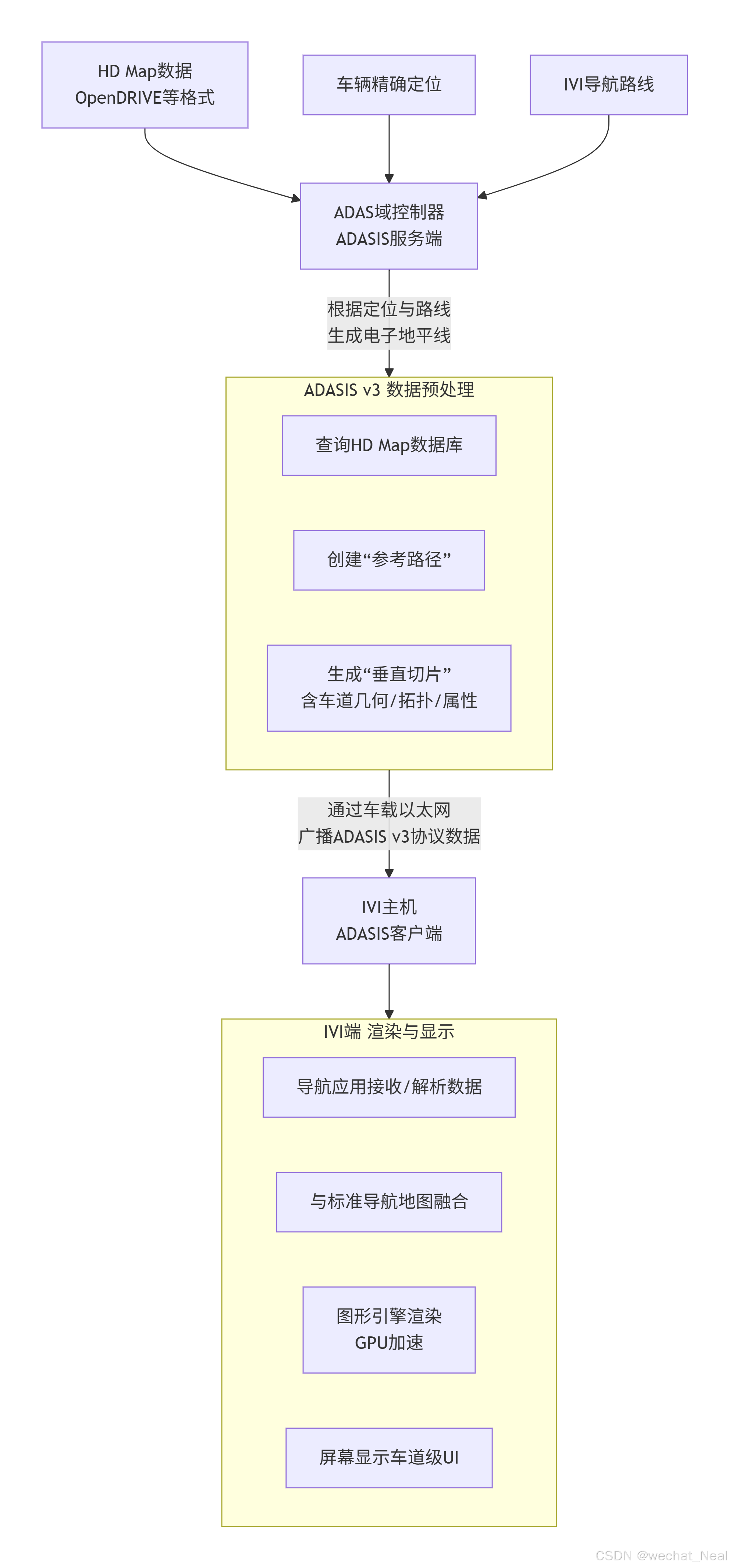
2. 数据传输与渲染的完整流程
为了更直观地理解这一复杂过程,我们可以将其分解为以下几个关键阶段:
3. 流程步骤详解
步骤 1 & 2: 数据准备与触发 (ADAS域)
基础数据: ADAS域控制器内部存储了完整的HD Map数据库(通常基于OpenDRIVE等格式)。
车辆状态: 通过融合GNSS、IMU、摄像头和激光雷达数据,ADAS域获得车辆的厘米级精确定位和姿态。
导航上下文: IVI的Navigation应用将规划的宏观导航路线(例如“从A地到B地”)通过另一套接口(如V2X或车企私有协议)发送给ADAS域控制器。这是触发整个过程的必要条件。
步骤 3: 电子地平线生成 (ADAS域)
ADASIS服务端结合当前定位和导航路线,计算出一条车辆最可能行驶的“参考路径”。
然后,它沿着这条路径,向前方延伸数百米,生成 “电子地平线”——一个动态的、可预知的道路环境模型。
步骤 4: 数据切片与广播 (ADAS域)
服务端并不发送整个地图,而是将电子地平线内的信息,切割成一系列小的 “垂直切片”。
每个切片包含了该路段丰富的车道级信息:
几何信息: 车道线形状、曲率、坡度。
拓扑信息: 车道的连接关系(如哪个车道在500米后可以并入主路)。
属性信息: 限速、交通标志类型等。
这些结构化的切片数据通过ADASIS v3协议进行封装,并通过车载以太网广播到车内网络中。
步骤 5: 数据接收与解析 (IVI域)
IVI主机上运行的Navigation应用,作为ADASIS客户端,订阅并接收这些广播数据。
应用解析ADASIS v3协议,从中提取出车道几何、拓扑和属性信息,将其转换为内部可用的数据模型。
步骤 6: 地图融合与渲染 (IVI域) - 这是显示的核心
融合: Navigation应用将接收到的车道级HD Map数据与它自身的标准导航地图(用于显示背景、POI、道路名称等)进行精确叠加和融合。
渲染: IVI的图形引擎开始工作:
它根据收到的车道几何数据,绘制出精确的车道线、车道数量、虚实线。
将车辆图标准确地定位在具体的某条车道上。
在复杂路口,根据拓扑数据,渲染出三维的车道引导箭头和推荐行驶路径。
在对应的位置绘制交通标志图标(如限速牌)。
这个过程通常由IVI的GPU进行硬件加速,以确保流畅的60帧/秒用户体验。
步骤 7: 显示
最终,渲染出的完整、精美的车道级导航画面被输出到IVI的高分辨率屏幕上,提供给用户。
4. 为什么渲染必须在IVI端?(架构优劣势分析)
这种分工是车载系统架构设计的必然选择。
| 维度 | 在 ADAS域 渲染 | 在 IVI域 渲染 (实际方案) |
|---|---|---|
| 职责与安全 | 不匹配。ADAS核心职责是安全,渲染UI属于非安全关键功能,会引入不必要的风险。 | 匹配。IVI专攻用户体验,负责复杂的图形显示是其核心任务。 |
| 系统资源 | 不匹配。ADAS域控制器的算力宝贵,主要用于感知、决策、规划。图形渲染能力弱。 | 匹配。IVI通常配备强大的应用处理器和GPU,专为高清图形和复杂UI设计。 |
| 效率与延迟 | 低效。需要将渲染好的视频流实时压缩并传输到IVI屏幕,带宽要求高,延迟大。 | 高效。数据量小的结构化地图切片传输效率高,IVI本地渲染延迟极低。 |
| 灵活性与迭代 | 差。UI风格、交互逻辑的更新需要涉及安全关键的ADAS软件,流程漫长、成本高。 | 好。OEM可以频繁更新IVI的导航App,快速迭代UI设计,增加新功能。 |
结论:
将HD Map的数据传输(ADASIS v3) 与地图渲染显示(IVI) 分离,是一种符合功能安全、资源优化和软硬件解耦原则的最佳工程实践。它使得ADAS域可以专注于“驾驶”,而IVI域可以专注于“体验”,两者通过标准化的接口高效协作,共同实现了车道级导航这一提升用户体验的杀手级功能。