GAOXian_CAD_KURUICHENG
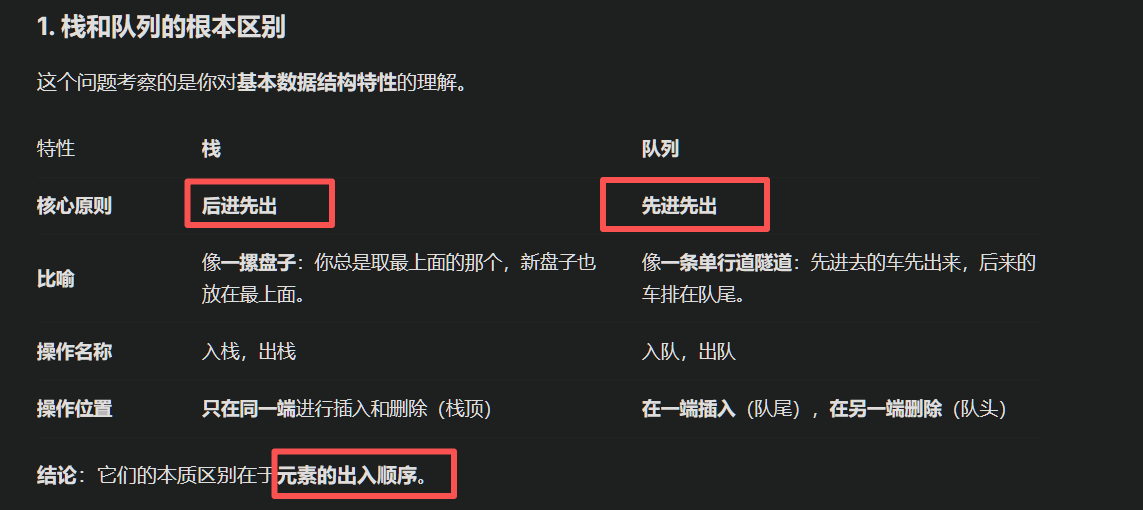
1.那个栈和队列他们的有什么区别?就是如果我给你两个栈,你能实现一个跟一个队列相似的功能吗
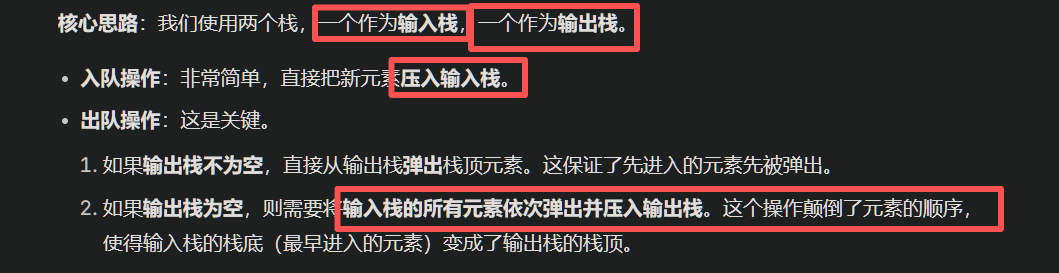
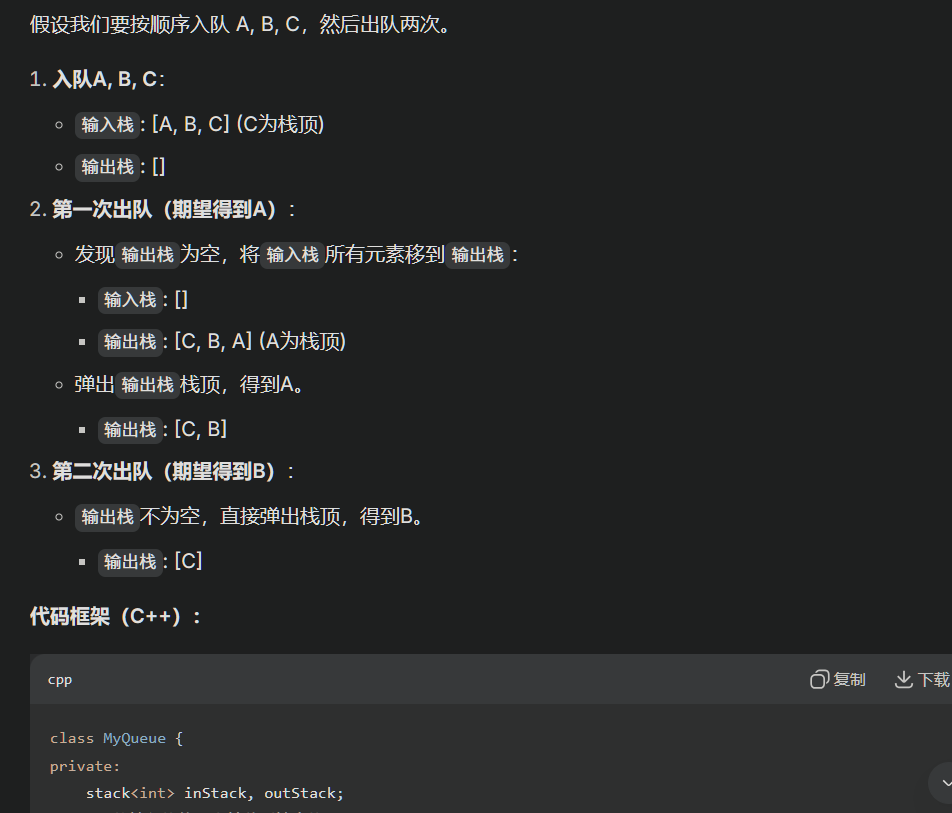
2.用两个栈实现一个队列
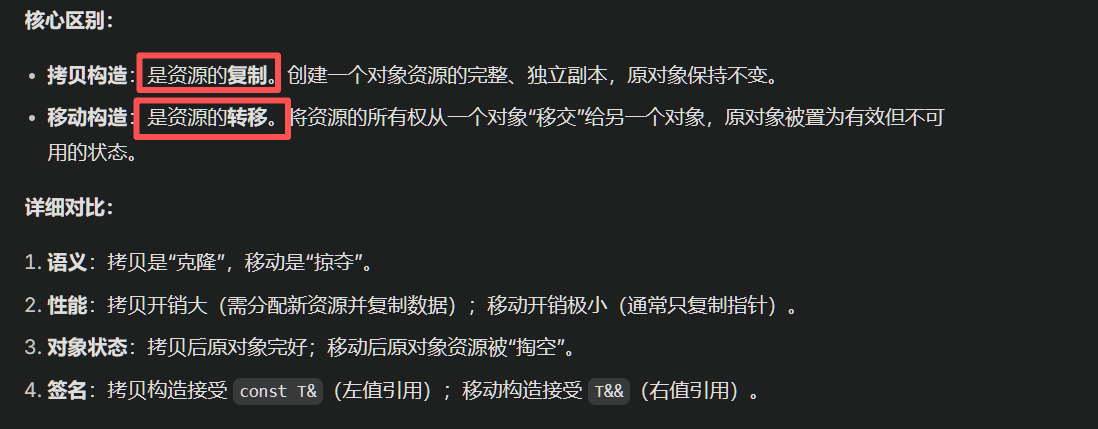
3.拷贝构造和移动构造的区别
4.如何将一个类改为单例模式

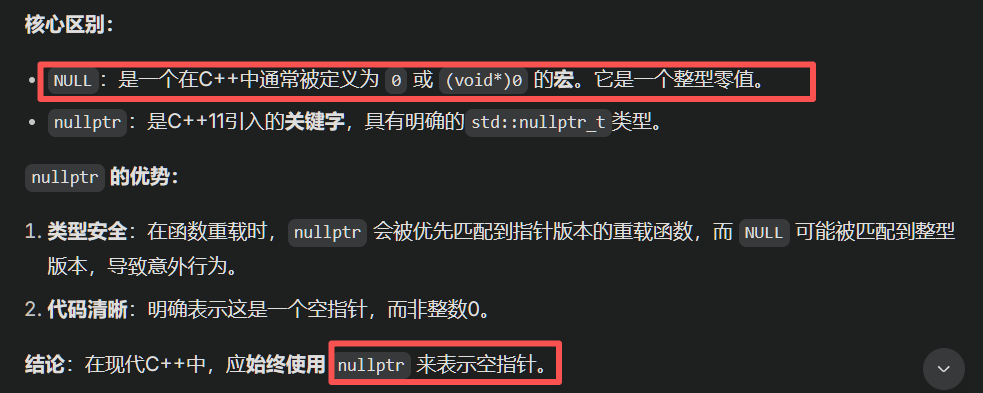
5.nullptr 和 NULL 的区别
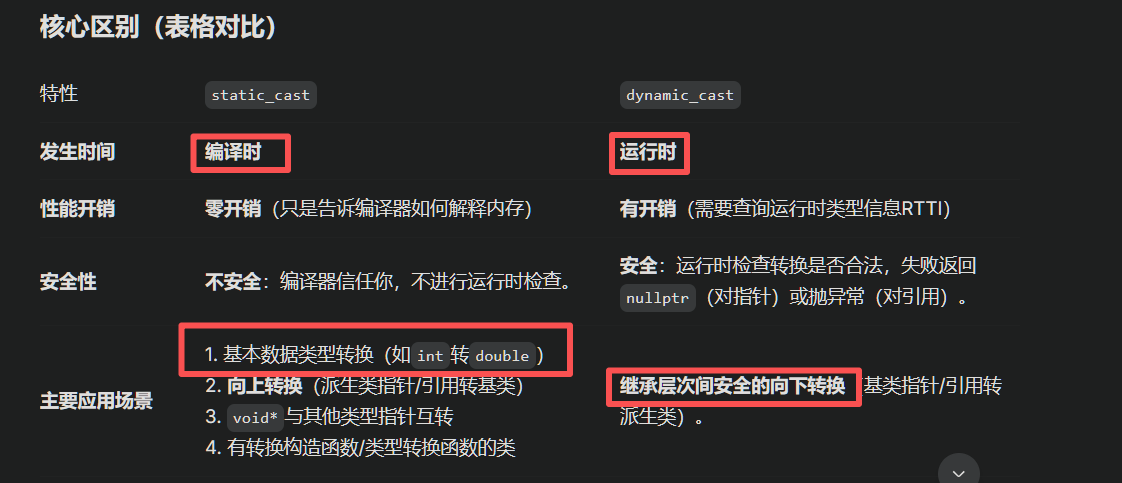
6.static_cast 和 dynamic_cast 的区别
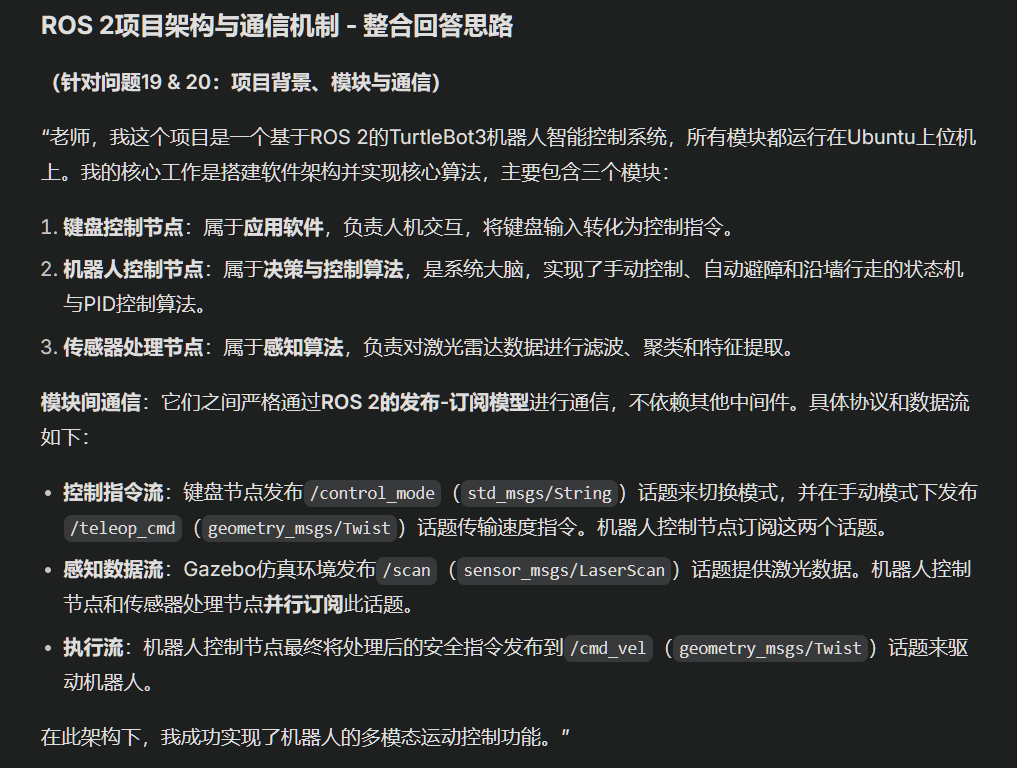
7.8&&讲得有点,这个笼统,就是这里面你比如说你的业务模块里面刚刚提到的有几个节点,就是你要实现什么功能到你是属于,比如说算法还是应用软件还是通信中间件,就是能简,先介绍一下这个背景,然后在这个背景上面有哪些个模块,然后这些模块之间是通过什么样的方式来做通信。
类似于说,比如说参与者你这个模块里面,你首先你是跑在这个上位机还是下位机上面,对吧?你上面比如说你有感知什么归控、地图定位或等等,这些模块有哪些个?这些参与者,各个参与者之间,他们之间要做交互,通过的通讯协议是什么?然后中间哪些数据传输?然后你通过这样的一个什么样的,在什么样的一个背景之下,你实现了什么功能:
9&&10 你这多个节点之间通这个,这种 rose 的话,你们一般 rose 里面多个模块里面他们怎么认识对方呢?嗯,那你再说一下,就是发布订阅的话,那你这个发布端和订阅端他们俩之间因为你那个节点比较多,嗯,谁发布过来的数据谁去收得到,各种啥的,中间要保持他们之间一发一收能收得到,或者是一发多收就收得到,你这个保证他们能够收到的机制,你们在定协议的时候,一般关键的这个东西应该是定哪些东西?
坐标系转换处理的??IMU,以及对应的一些消息类型
世界坐标系和机器人坐标系的转换
someip底层是通过UDP还是TCP呢??会差错重传嘛?
can通讯协议时 全双工还是 半双工
对方让我回答一下someip,讲讲这个概念,你看我应该怎么回答给我一个完整的一个回答思路
someip:一种基于IP网络的、面向服务的通信中间件。核心特性:把功能抽象为 “服务”,实现组件之间的“解耦”,向下封装逻辑,向上提供接口
主要通信模式:
请求/响应:用于远程过程调用
事件通知:服务端主动向订阅的客户端推送数据变化
相比于can通信
1.静态与带宽浪费(can周期性地广播)
2.功能单一无复杂交互,带宽瓶颈(1Mbps)
someip:
1.高带宽支持100Mbps
2.请求响应 / 服务发现 / 订阅发布
最核心的改变是引入了基于‘请求/响应’模式的远程过程调用(RPC)
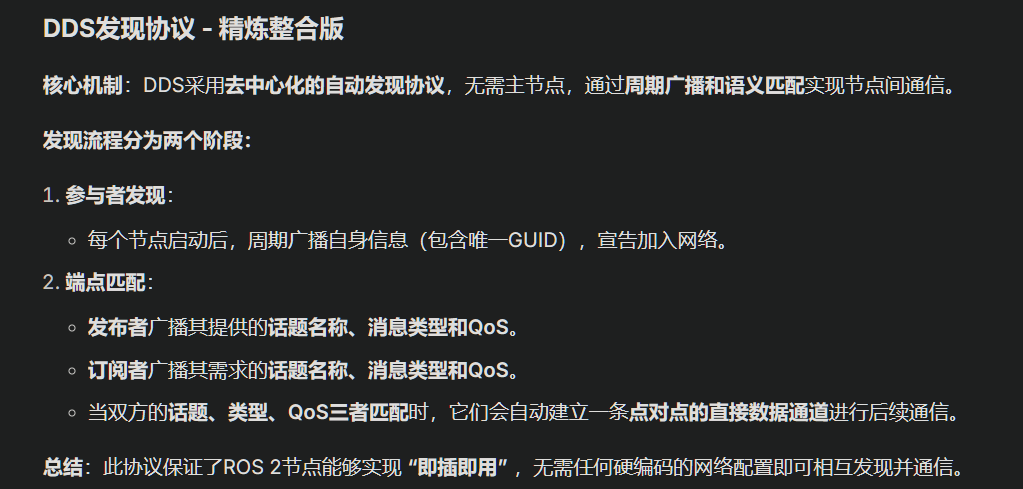
然后一直在做 rose 中间件应用一些开发。对啊,我们用的这个DS,比如说它那个像 discover 这一块的协议大概是怎么样的了解吗?对设备发现这个服务,它怎么是交互的?