多线程编程核心:可重入与线程安全解析及条件变量应用
目录
一、可重入 vs 线程安全:深度解析与对比
1、概念解析
线程安全
重入(可重入性)
2、线程不安全的常见场景
3、线程安全的常见场景
4、不可重入的常见场景
5、可重入的常见场景
6、可重入与线程安全的联系与区别
7、锁相关概念与死锁
8、总结
二、为什么 pthread_cond_wait 需要互斥量?
1、条件等待的本质
2、错误设计的分析
3、pthread_cond_wait 的原子性设计
三、条件变量的使用规范
1、等待条件的正确模板
2、通知条件的正确模板
四、条件变量的封装(C++示例)
1、封装目标
2、封装代码(Cond.hpp)
3、封装注意事项
五、总结
一、可重入 vs 线程安全:深度解析与对比
1、概念解析
线程安全
-
指在多线程环境下,多个线程同时执行同一段代码时,能够保证数据的一致性和结果的正确性,不会因并发访问导致不可预测的行为。
-
常见于对全局变量或静态变量进行操作且缺乏锁保护的场景,此时易引发线程安全问题。
重入(可重入性)
-
指同一函数可被多个执行流(如线程、中断)重复调用,且在前一次调用未完成时,后续调用仍能正确执行,结果不受影响。
-
满足此条件的函数称为可重入函数,否则为不可重入函数。
关键区别:线程安全关注多线程执行时的安全性,而重入性关注函数被重复调用时的行为一致性。
2、线程不安全的常见场景
-
未保护共享变量:多线程直接读写全局/静态变量,无同步机制。
-
函数状态依赖调用:函数内部状态随调用次数变化(如静态计数器)。
-
返回静态变量指针:函数返回指向静态存储区的指针,多线程并发修改导致数据竞争。
-
调用非线程安全函数:函数内部依赖非线程安全的库或操作。
3、线程安全的常见场景
-
只读访问共享变量:多线程仅读取全局/静态变量,无写入操作。
-
原子操作:类或接口的方法保证操作完整性(如CAS操作)。
-
无二义性结果:多线程切换不影响接口执行结果的确定性。
4、不可重入的常见场景
-
依赖全局堆管理:如调用
malloc/free(使用全局链表管理内存)。 -
使用非重入I/O库:标准I/O库实现可能依赖全局数据结构。
-
静态数据结构:函数内部使用静态变量存储状态。
5、可重入的常见场景
-
无全局/静态变量:所有数据通过参数传递或局部变量存储。
-
避免动态内存分配:不使用
malloc/new,改用栈分配或预分配内存。 -
不调用不可重入函数:确保依赖的函数也是可重入的。
-
返回调用者提供的数据:不返回静态或全局数据的指针。
-
本地化全局数据:通过拷贝全局数据到局部变量保护共享状态。
6、可重入与线程安全的联系与区别
联系:可重入函数一定是线程安全的,因其不依赖共享状态,天然避免竞争。
区别:
-
可重入性是线程安全的充分条件,但非必要条件。线程安全函数可能通过锁等机制保护共享状态,但未必可重入(如锁未释放时重入会导致死锁)。
-
线程安全函数可能依赖外部同步(如互斥锁),而可重入函数通过无状态设计实现自包含安全性。
7、锁相关概念与死锁
死锁:指两个或多个执行流(进程/线程)因互相等待对方持有的资源而陷入永久阻塞的状态。
单执行流死锁:即使单个线程也可能死锁。例如,线程连续两次申请同一把未释放的锁:
#include <stdio.h>
#include <pthread.h>pthread_mutex_t mutex;
void* Routine(void* arg)
{pthread_mutex_lock(&mutex);pthread_mutex_lock(&mutex);pthread_exit((void*)0);
}
int main()
{pthread_t tid;pthread_mutex_init(&mutex, NULL);pthread_create(&tid, NULL, Routine, NULL);pthread_join(tid, NULL);pthread_mutex_destroy(&mutex);return 0;
}
执行代码后,程序即进入挂起状态。
运行后,进程状态显示为Sl+(l表示锁等待),表明陷入死锁。使用ps命令查看进程时,可以看到该进程当前状态显示为"Sl+"。其中"l"代表锁定(lock),表明该进程目前处于死锁状态。
ps axj | head -1 && ps axj | grep Main | grep -v grep
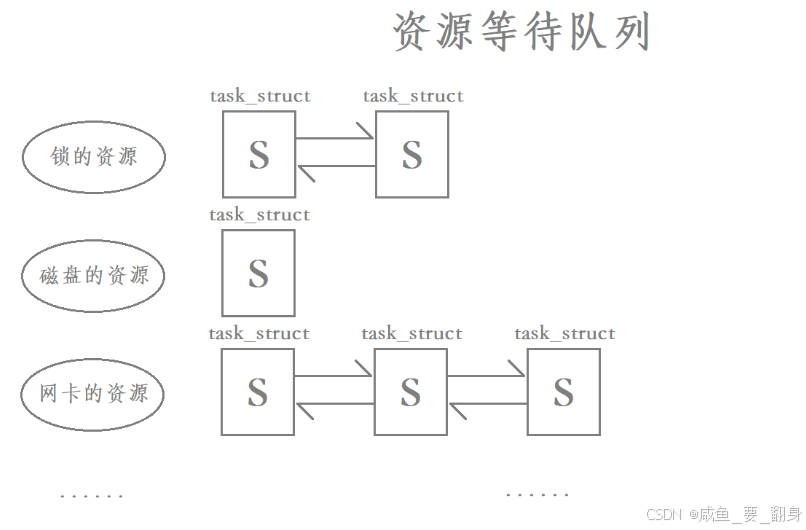
阻塞:进程因等待资源(如CPU、锁、磁盘I/O)而被移出运行队列,进入对应资源的等待队列。例如:
-
线程A持有锁L,线程B请求L时被阻塞,进入L的等待队列。
-
当线程A释放L后,操作系统从等待队列中唤醒一个线程(如线程B),将其重新加入运行队列。

死锁的四个必要条件:
-
互斥条件:资源一次仅能被一个执行流占用。
-
请求与保持条件:执行流持有资源时继续请求新资源,且不释放已有资源。
-
不剥夺条件:已分配的资源不能被强制剥夺。
-
循环等待条件:执行流之间形成环形等待链(如T1等T2,T2等T3,T3等T1)。
避免死锁的策略:
-
破坏必要条件:
-
打破循环等待(如按固定顺序加锁)。
-
允许资源抢占(如优先级继承协议)。
-
避免持有并等待(如一次性分配所有资源)。
-
-
加锁顺序一致:所有线程以相同顺序获取锁。
-
超时机制:加锁时设置超时,避免无限等待。
-
死锁检测与恢复:定期检测死锁并回滚操作(如银行家算法)。
8、总结
-
线程安全是多线程编程的基础要求,通过同步机制(如锁)保护共享状态。
-
可重入性是函数设计的更高标准,通过无状态化实现自包含安全性。
-
死锁预防需从资源分配策略和加锁顺序入手,结合检测算法提升系统鲁棒性。
理解这些概念有助于设计高效、可靠的多线程程序,避免并发问题导致的性能下降或数据不一致。
二、为什么 pthread_cond_wait 需要互斥量?
1、条件等待的本质
条件等待(pthread_cond_wait)是线程间同步的核心机制之一。其核心逻辑是:
-
等待线程:检查共享条件(如队列非空、资源可用等),若条件不满足,则主动阻塞并释放CPU资源。
-
通知线程:通过修改共享变量使条件满足,并唤醒等待线程。
关键点:条件的满足必然依赖于共享数据的修改(例如,生产者向队列添加数据后通知消费者)。因此,共享数据的访问必须通过互斥量(Mutex)保护,否则会导致数据竞争(Data Race)。
2、错误设计的分析
以下是一个逻辑错误的代码示例:
// 错误设计:解锁和等待非原子操作
pthread_mutex_lock(&mutex);
while (condition_is_false) {pthread_mutex_unlock(&mutex); // 解锁// 问题:解锁后、等待前,其他线程可能已修改条件并发送信号,但此处会错过信号!pthread_cond_wait(&cond, &mutex); // 等待pthread_mutex_lock(&mutex); // 重新加锁
}
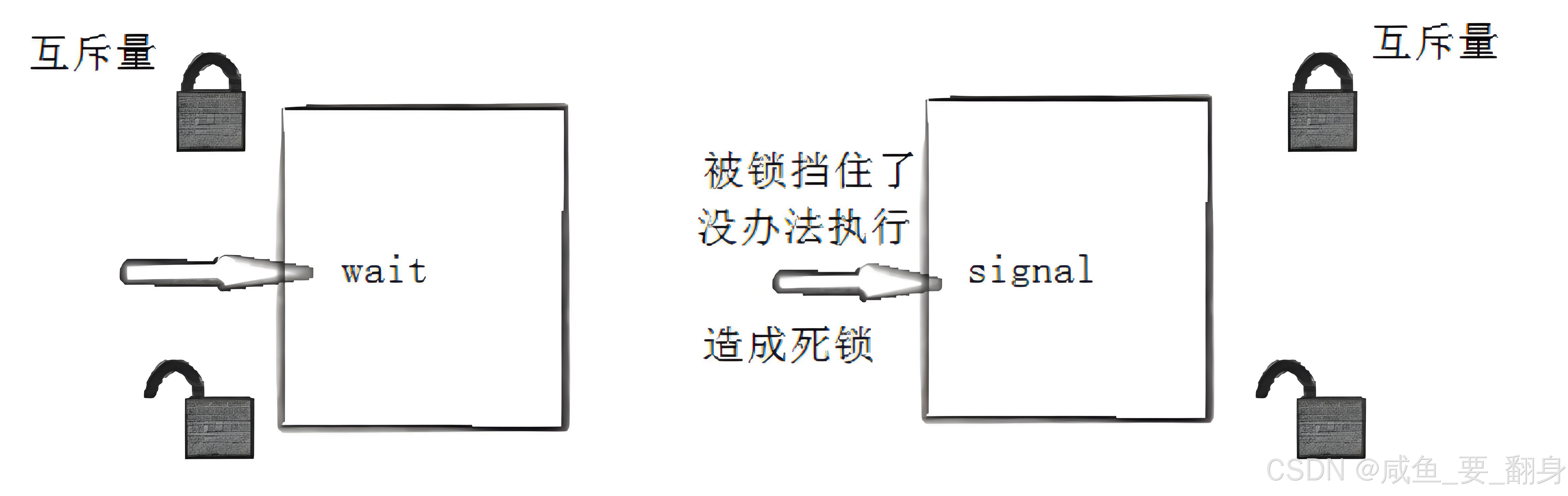
pthread_mutex_unlock(&mutex);问题根源:
-
非原子性:
pthread_mutex_unlock和pthread_cond_wait是分开的操作。在解锁后、等待前,如果其他线程:-
获取互斥量并修改条件为真。
-
调用
pthread_cond_signal发送信号。
-
-
此时当前线程还未调用
pthread_cond_wait,会永久错过信号,导致线程无法被唤醒(即使条件后来满足)。
3、pthread_cond_wait 的原子性设计
pthread_cond_wait 的正确行为是原子操作:
-
进入函数时:
-
释放传入的互斥量(允许其他线程修改共享数据)。
-
阻塞线程,等待条件变量信号。
-
-
被唤醒时:
-
重新获取互斥量(保证对共享数据的独占访问)。
-
返回给调用者。
-
伪代码逻辑:
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex) {// 原子操作:释放mutex + 阻塞等待unlock_and_wait(cond, mutex);// 被唤醒后,自动重新加锁(此处由库内部实现)lock(mutex);return 0;
}三、条件变量的使用规范
1、等待条件的正确模板
pthread_mutex_lock(&mutex);
while (条件为假) { // 必须用while循环(避免虚假唤醒)pthread_cond_wait(&cond, &mutex); // 原子操作:解锁+等待+重新加锁
}
// 此时条件为真,且持有mutex
pthread_mutex_unlock(&mutex);关键细节:
-
while而非if:防止虚假唤醒(Spurious Wakeup),即线程被意外唤醒时需重新检查条件。 -
互斥量保护:所有对共享条件的访问必须在锁内完成。
2、通知条件的正确模板
// 通知单个等待线程
pthread_mutex_lock(&mutex);
设置条件为真; // 修改共享变量
pthread_cond_signal(&cond); // 发送信号
pthread_mutex_unlock(&mutex);// 通知所有等待线程(广播)
pthread_mutex_lock(&mutex);
设置条件为真;
pthread_cond_broadcast(&cond); // 唤醒所有线程
pthread_mutex_unlock(&mutex);关键细节:
-
通知前需加锁:确保对共享条件的修改和通知是原子的。
-
signalvsbroadcast:-
signal:唤醒至少一个线程(更高效)。 -
broadcast:唤醒所有线程(适用于多个线程等待同一条件)。
-
四、条件变量的封装(C++示例)
1、封装目标
-
隐藏
pthread_cond_t的底层细节。 -
提供类型安全的接口(如与自定义
Mutex类解耦)。 -
避免资源泄漏(通过RAII管理生命周期)。
2、封装代码(Cond.hpp)
#pragma once
#include <pthread.h>
#include "Lock.hpp" // 假设已封装Mutex类namespace CondModule {
using namespace LockModule;class Cond {
public:Cond() {if (pthread_cond_init(&_cond, nullptr) != 0) {// 错误处理(如抛出异常或记录日志)}}// 等待条件(需外部传入Mutex)void Wait(Mutex& mutex) {if (pthread_cond_wait(&_cond, mutex.GetMutexOriginal()) != 0) {// 错误处理}}// 通知单个线程void Notify() {if (pthread_cond_signal(&_cond) != 0) {// 错误处理}}// 通知所有线程void NotifyAll() {if (pthread_cond_broadcast(&_cond) != 0) {// 错误处理}}~Cond() {if (pthread_cond_destroy(&_cond) != 0) {// 错误处理(通常析构时不应失败)}}private:pthread_cond_t _cond;
};
} // namespace CondModule3、封装注意事项
-
解耦设计:不将
Mutex成员直接嵌入Cond类,而是通过参数传入,避免初始化顺序问题(例如,Cond和Mutex需独立构造)。 -
错误处理:示例中简化了错误处理,实际应添加日志或异常机制。
-
扩展性:可进一步封装为RAII类(如
CondVar),结合std::condition_variable的设计模式。
五、总结
-
pthread_cond_wait需要互斥量:保证共享数据的安全访问,并避免信号丢失。 -
使用规范:等待时用
while循环,通知时在锁内修改条件。 -
封装建议:保持接口简洁,解耦
Mutex依赖,注意资源管理。
通过以上设计,可以安全、高效地实现线程间同步。