企业实训|AI技术在高阶自动驾驶的应用——某央企汽车集团
10月中旬北京,某央企汽车集团《人工智能技术在高阶自动驾驶的应用》实战课程在北京海淀开课,本课程由TsingtaoAI派驻技术专家主讲,聚焦2025智能驾驶行业关键转折点,系统解析从AI技术路线到量产落地的全链条实践。

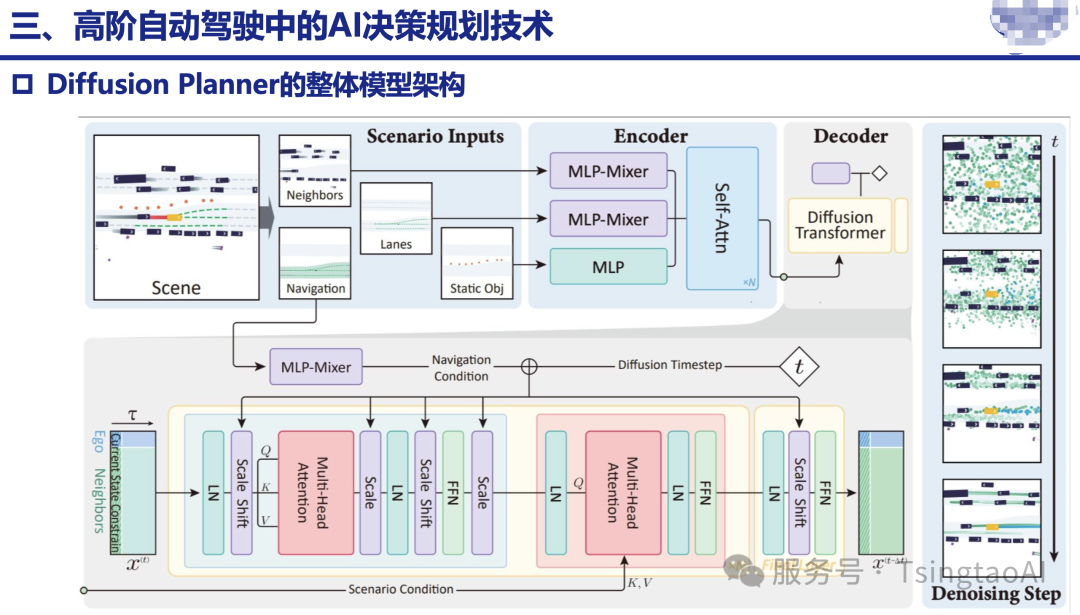
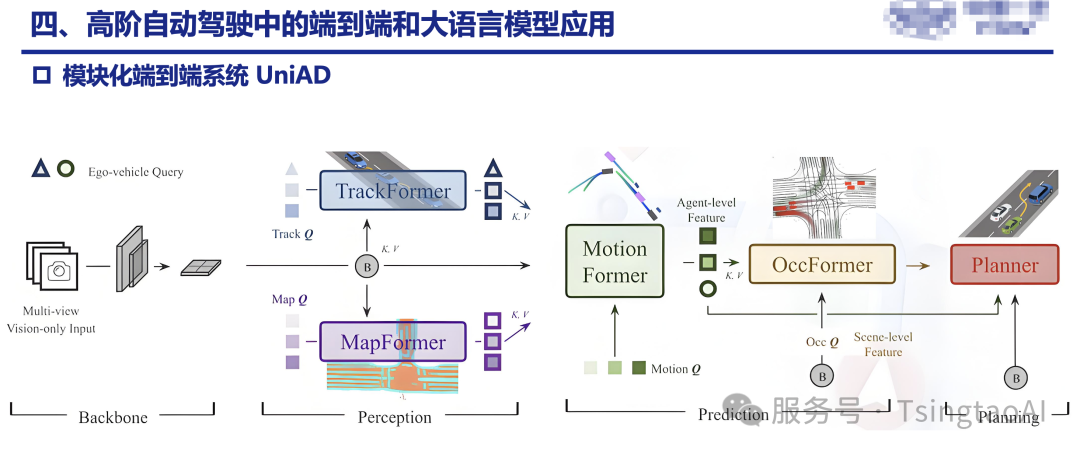
当前高阶自动驾驶已进入L3-L4量产爆发期,传统规则系统因corner case处理能力不足正加速向AI驱动的端到端架构转型。华为ADS4.0、特斯拉FSD V12实现纯视觉端到端,理想汽车2024年推出的“双系统”架构成为行业新标杆。课程深度解析基于深度学习的BEV多模态感知、CenterPoint激光雷达3D检测、Diffusion Planner动态轨迹生成,以及强化学习与规则混合的规划算法,结合UniAD模块化端到端框架与大语言模型的场景理解能力,直面数据闭环“80%性能爬坡”挑战。通过Carla仿真验证及实战演练,帮助学员掌握从传统HD map+规则方案到AI驱动的高阶智驾系统转型路径,直击量产落地痛点。实训课程内容基于行业最新实践,涵盖从感知、决策到验证的全链路AI技术应用,确保学员能快速将理论转化为实操能力。


1.掌握核心技术与AI基础
● 理解L3-L5自动驾驶技术瓶颈,熟悉感知、决策、控制流程。
● 掌握ML/DL/RL在自动驾驶中的应用及挑战(如数据依赖、可解释性)。
2.精通AI环境感知与预测
● 运用深度学习模型(YOLO、U-Net等)实现精准感知。
● 掌握轨迹预测模型(LSTM/Transformer)及多模态交互技术。
3.理解决策规划与测试验证
● 学习强化学习与规则混合的路径规划及动态优化技术。
● 掌握仿真平台(Carla)使用及对抗性测试方法。

1高阶自动驾驶概述与AI基础
● 高阶自动驾驶的定义与发展现状
● 自动驾驶的感知、决策与控制循环
● 人工智能在自动驾驶中的独特优势与挑战
● AI基础知识回顾:机器学习、深度学习与强化学习简介
2基于深度学习的环境感知(上)
2.1、视觉感知:图像识别与目标检测
2.2、雷达与激光雷达感知:点云处理
3基于深度学习的环境感知(下)与交通标识识别
3.1、BEV感知算法
3.2、交通标识识别:红绿灯与车道线识别
4预测与行为分析
4.1、交通参与者行为预测:基于深度学习的轨迹预测模型
4.2、意图识别
4.3、场景理解与事件检测
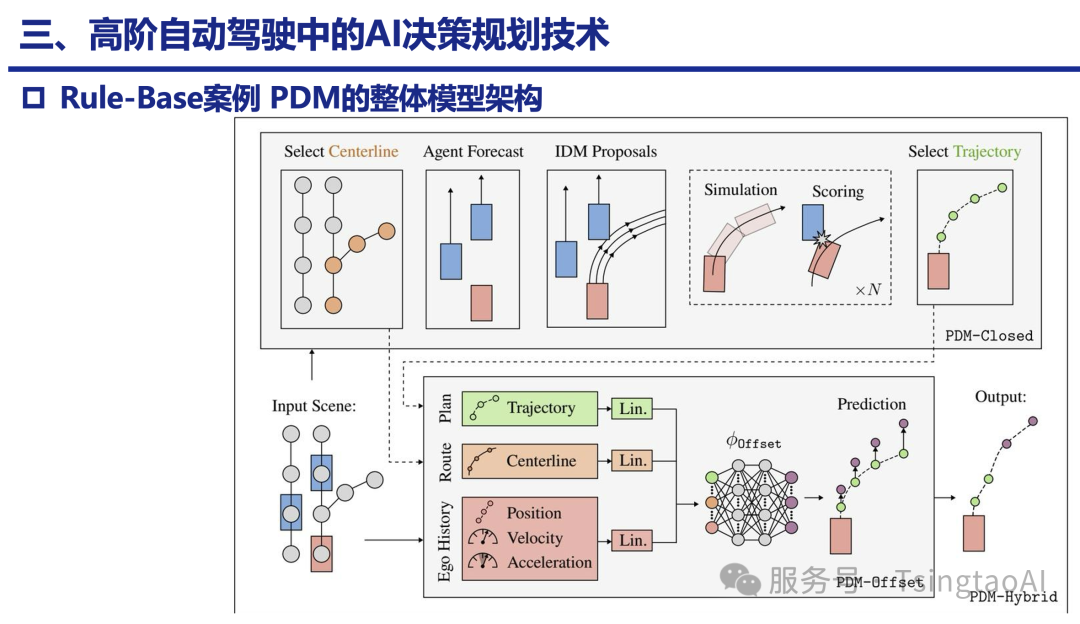
5决策规划
5.1、基于强化学习和规则的混合规划算法
5.2、全局路径与局部路径规划
5.3、运动规划:避障与舒适性优化
6导航与控制
6.1、基于VLN和VLA的导航
7AI在自动驾驶测试与验证中的应用
7.1、自动驾驶仿真平台与虚拟测试环境
7.2、数据驱动的测试
8前沿进展与未来趋势
8.1、End-to-End自动驾驶的探索与挑战。
8.2、大模型与自动驾驶的结合