【王树森深度强化学习】基本概念 Deep Reinforcement Learning (1/5)
随机变量
- 随机变量:随机变量是一个未知变量,它的值取决于一个随机事件的结果
- 比如抛硬币是一个随机事件,抛硬币的结果就记为 X。它可能有两种取值:0 和 1。在抛硬币之前我是不知道 X 是什么的,但是我知道这个随机时间的概率

- 通常用小写字母 x 来表示对随机变量的观测值
概率密度函数(Probability Density Function,PDF)
- 它意味着随机变量在某个确定的取值点附近的可能性
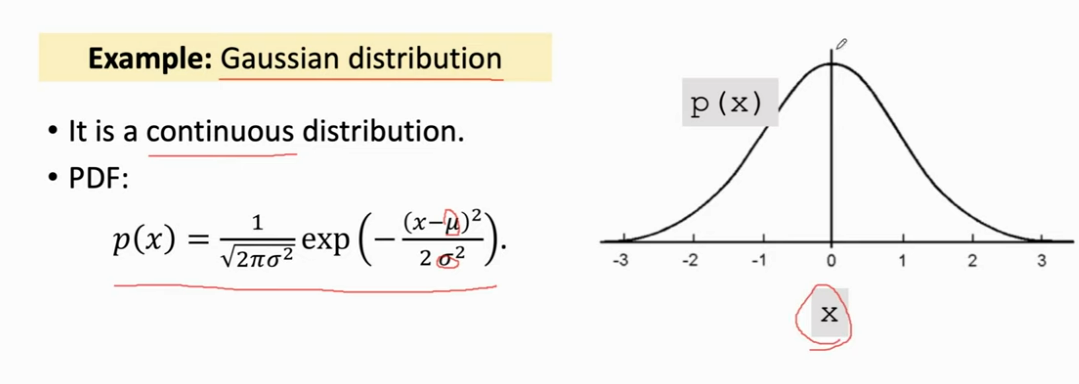
- 高斯分布(也即标准正态分布)是一个连续的概率分布,随机变量 x 的取值可以是任何一个实数
- 下面坐标图的横轴是 x 的取值,纵轴就是概率密度,整体就是高斯分布的概率密度函数。这个概率密度说明这个概率在原点附近的取值概率比较大,在远离原点附近的取值概率比较小
- 下面是离散的概率分布,X 只能取 1,3,7
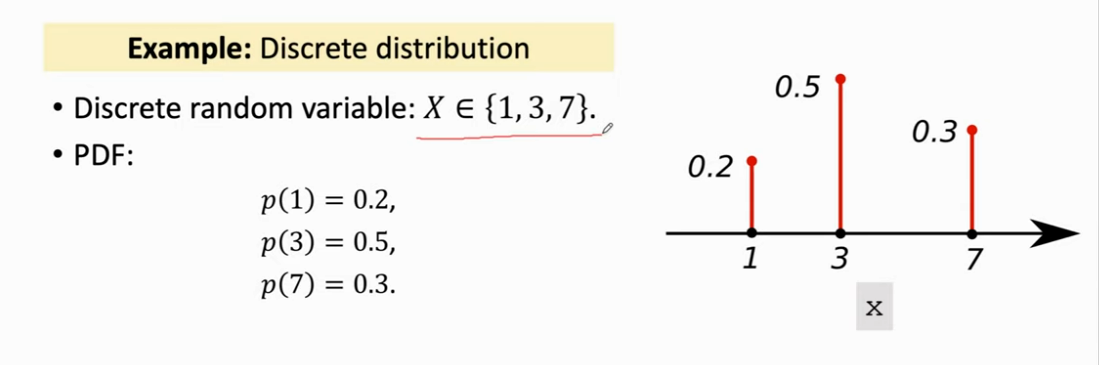
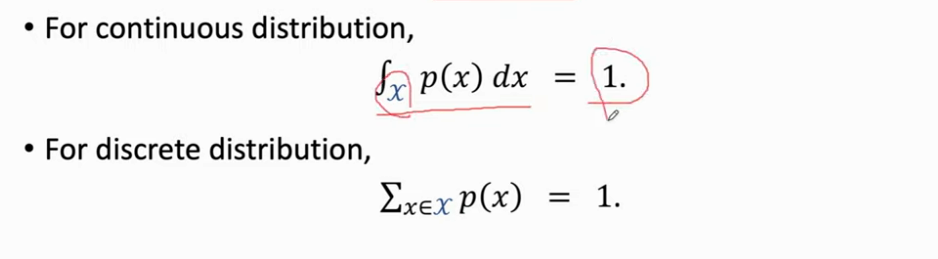
- 随机变量 X 的定义域记作 X\mathcal{X}X
- 对于连续的概率密度函数,对定义域算定积分等于1。而离散则是所有取值加起来等于1
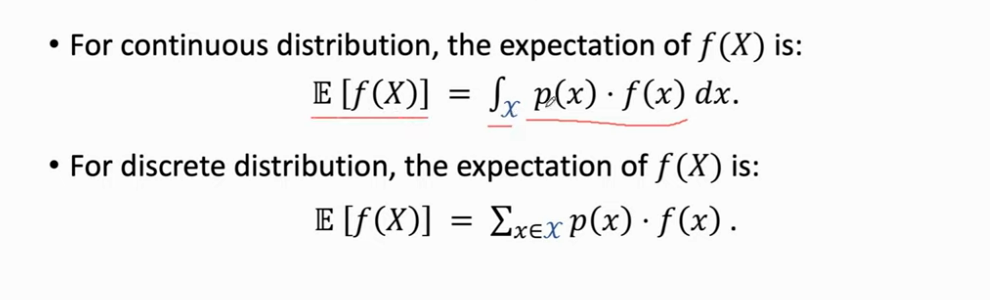
期望(Expectation)
- 对于连续和离散, f(X)f(X)f(X) 的期望被分别定义为如下
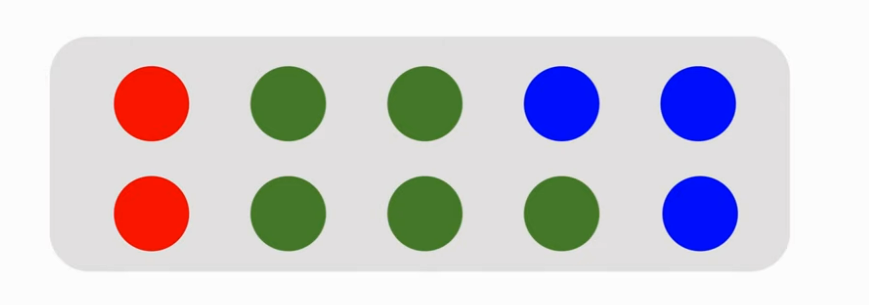
随机抽样(Random Sampling)
- 有 10 个球:2 个红色,5 个绿色和 3 个蓝色
- 闭着眼睛摸一个球,在我摸到前,我摸到的颜色就是一个随机变量 X,X 有三种可能的取值:红色,绿色和蓝色。现在我真的摸出了一个球,此时我睁开眼睛一看,它便有了观测值:红色。而这个过程就叫随机抽样:我从箱子里面随机抽一个球,并且观测到了抽出来的颜色
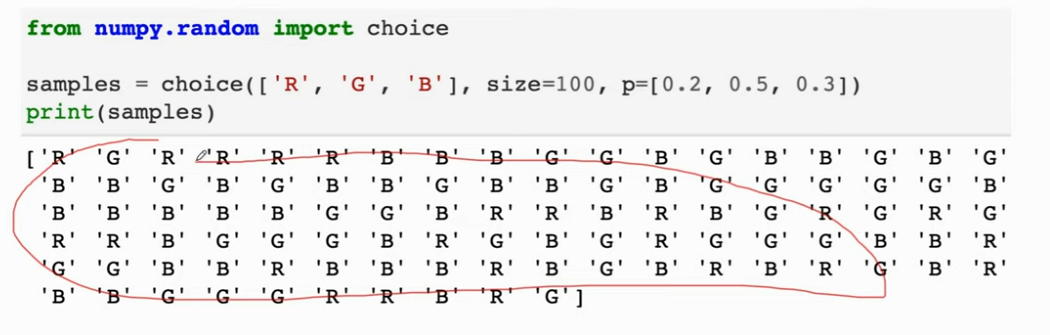
- 换一种问法:箱子里面有很多个球,我也不知道有多少个。现在做随机抽样,抽到红色球的概率是 0.2,抽到绿色球的概率是 0.5,抽到蓝色球的概率是 0.3。现在依旧摸球,问题和刚刚是一样的
- 那么现在我进行这个过程 100 次,此时便有一定的统计意义了。那么它的红蓝绿的次数应该分别差不多在 20,30,50
- 如果你对随机抽样不熟,你就想想这个摸彩球的例子
专业术语(Terminologies)
- 状态(state)sss:假如在玩超级玛丽,可以理解为状态就是屏幕上的这个画面,这个说法不太严谨,即观测和状态不一定是一样的东西,但是在这节课里可以先这样理解
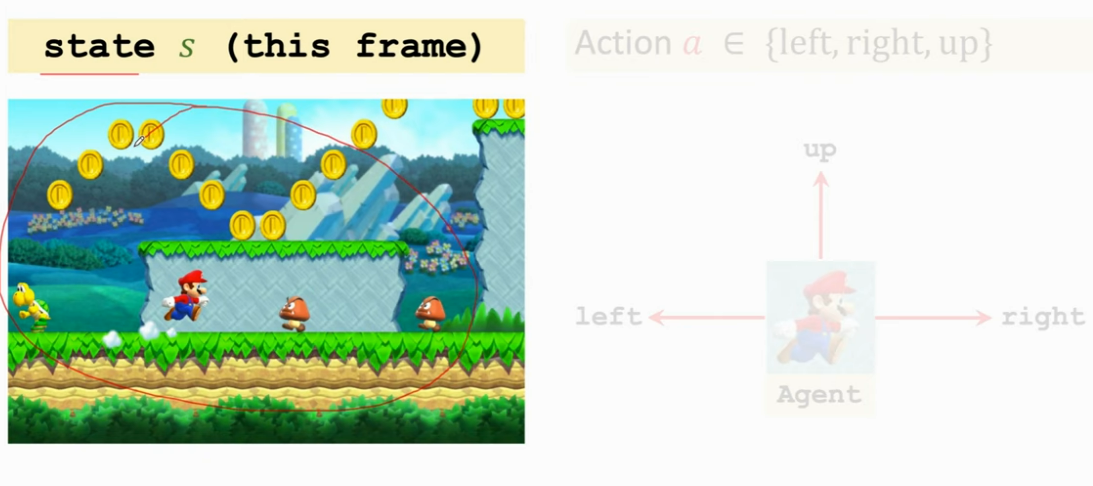
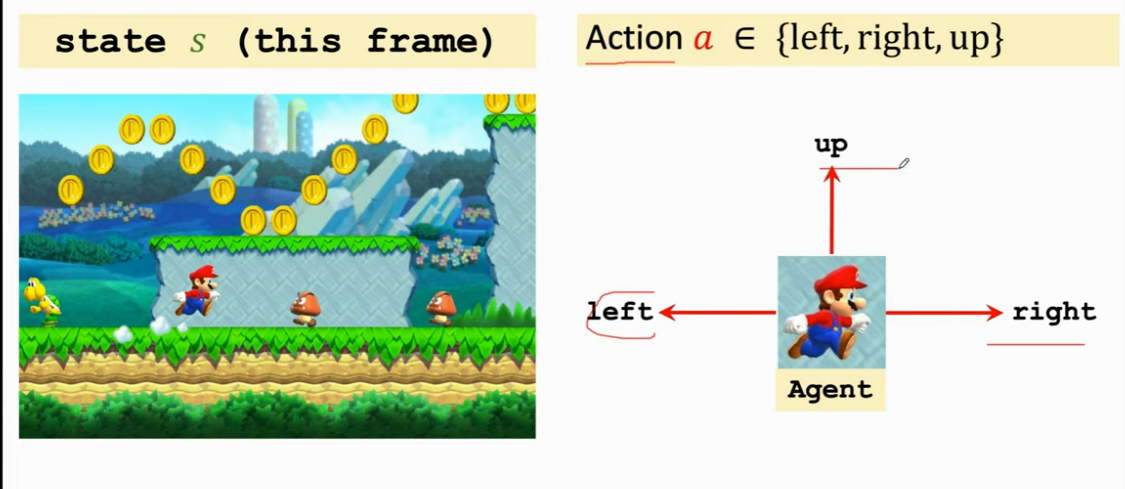
- 马里奥做的动作就叫 Action aaa
- 在这里马里奥被叫做 agent,如果你做的是自驾,那么汽车就是 agent,总之在一个动作里面,动作是由谁做的,谁就是 agent
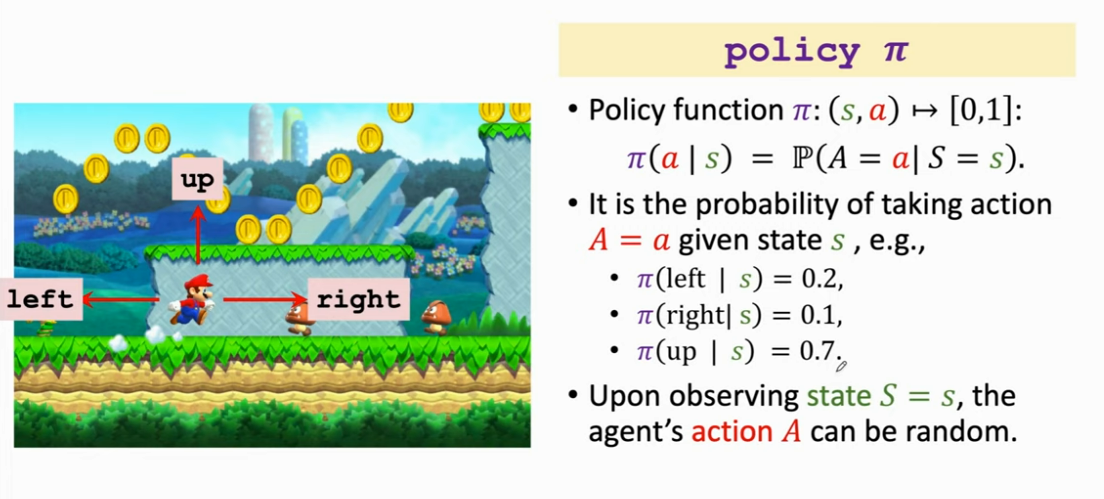
- policy π\piπ:根据观测到的状态而做出决策而控制 agent 运动
- 在这里的 policy 函数是一个概率密度函数,即观测到状态 sss 的情况下做出动作 aaa 的概率
- 强化学习就是去学 policy 函数,只要学好了这个函数,就能自动操纵马里奥赢游戏了
- 这里的 policy 是不确定的 ,也可以去训练确定的 policy
- 在这个游戏训练确定和或者不确定的都行,但是如果要跟人博弈最好还是学不确定的。要是你的动作很固定就很容易被看穿
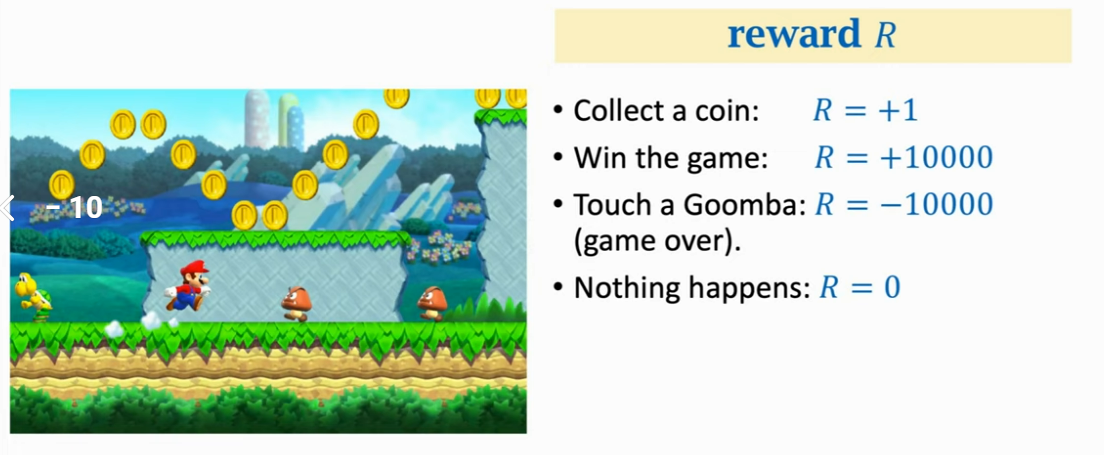
- reward RRR:agent 做出一个动作,游戏就会给出奖励。这个奖励通常需要我们自己来定义,奖励定义的好坏非常影响强化学习的结果
- 奖励定义举例:
- 吃金币:R=+1R=+1R=+1
- 赢游戏:R=+10000R=+10000R=+10000,赢游戏的奖励应该尽量大,不然马里奥就只会吃金币而不赢游戏
- 碰到敌人:R=−10000R=-10000R=−10000,如果碰到敌人就死了
- 什么也发生:R=0R=0R=0
- 强化学习的目标是获得的奖励总和尽量要高
-
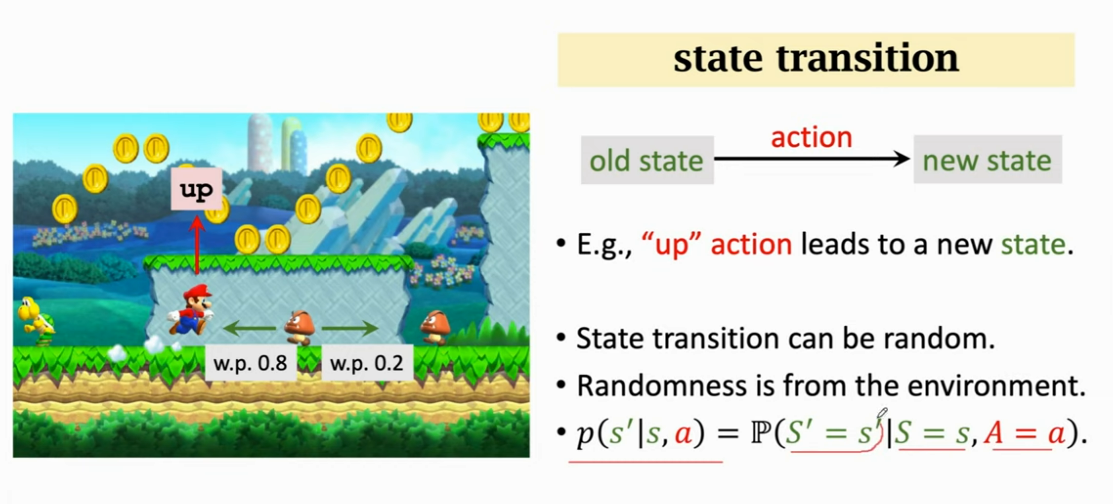
状态转移(state transition):当前状态下马里奥做出一个动作,游戏就会转移为一个新的状态。比如跳一下屏幕画面就不一样了,这就是一个新的状态
-
状态转移可以是确定的也可以是随机的,通常认为是随机的
-
状态转移的随机性是从环境里来的,在这里环境就是游戏的程序,游戏的程序决定下一个状态是什么。比如如果马里奥向上跳这个是确定的,但是敌人左右移动是随机的,由游戏程序决定的,这就造成了下一个状态的随机性
-
可以把状态转移用 p(s′∣s,a)p(s'|s,a)p(s′∣s,a) 函数来表示,它是一个条件概率密度函数,意思是如果观测到当前的状态的 sss 以及动作 aaa,ppp 函数输出 s′s's′ 的概率
-
在图中这个例子马里奥会跳到上面,而敌人的往左和往右并不确定,分别有一定的概率,这个我们玩家是不可知的,这个状态转移函数只有环境可以知道
-
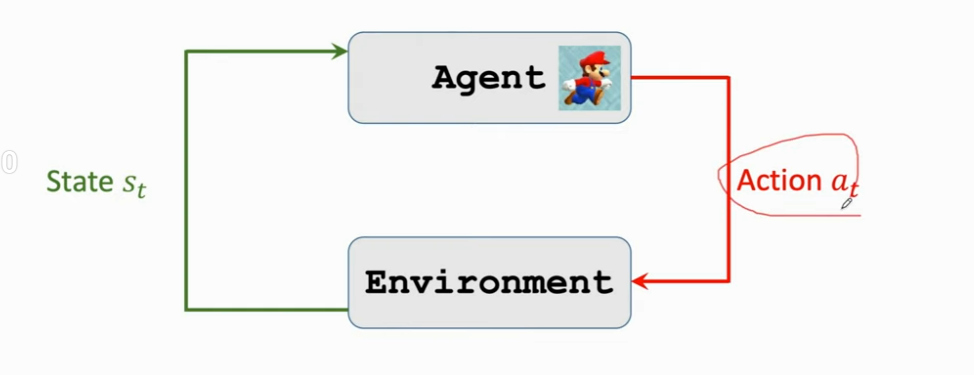
agent 与环境交互(agent environment interaction):这里的环境是游戏程序,agent是马里奥,状态 sts_tst 是环境告诉我们的,这里我们可以把屏幕上显示给我们的游戏画面看作 sts_tst
-
动作 ata_tat 可以是向左走,向右走或者向上跳
-
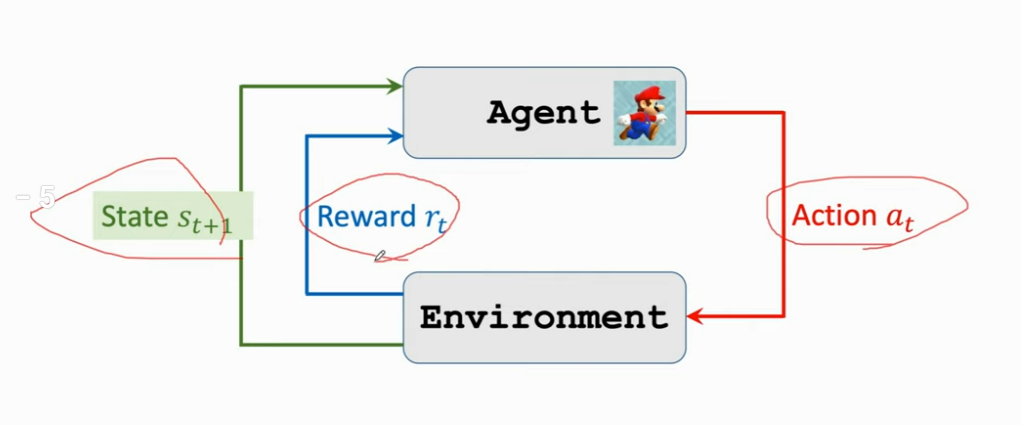
agent 做出动作后,环境会更新状态,更新成 st+1s_{t+1}st+1,同时环境会给 agent 一个奖励 rtr_trt
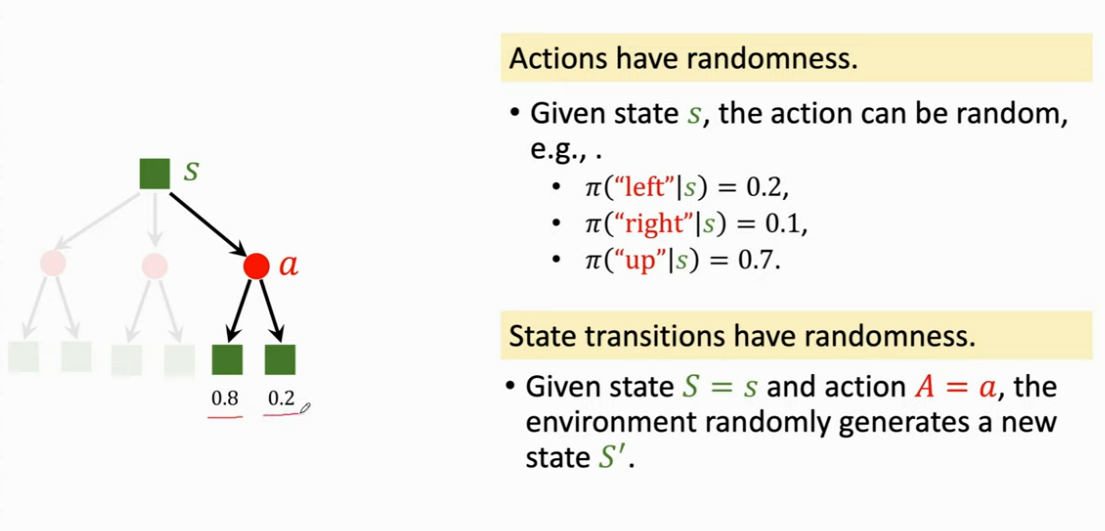
强化学习中的随机性(Randomness in Reinforcement Learning)
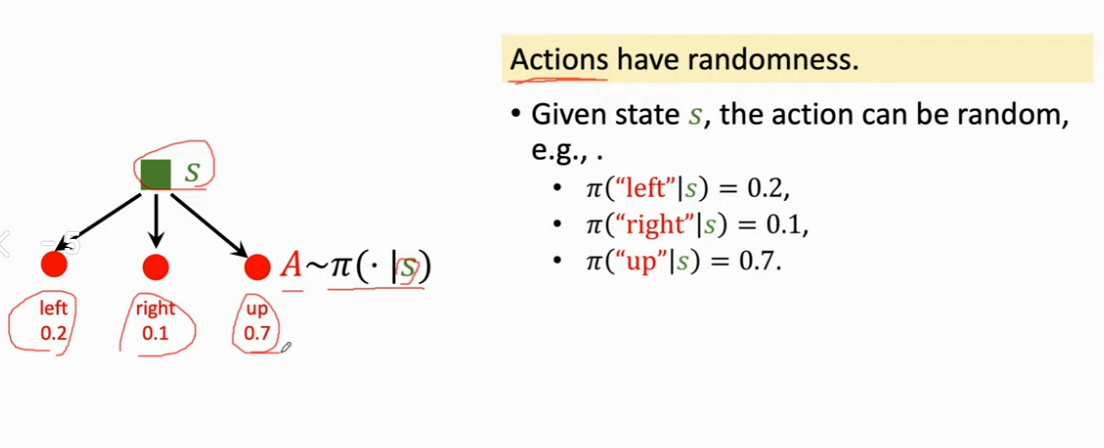
- 强化学习有两个随机性来源,第一个随机性是从 agent 动作中来的,因为动作是根据 policy 函数随机抽样得到的,我们用 policy 函数来控制 agent
- 给定当前观测的状态 sss,agent 动作 aaa 是 policy 函数输出的概率来随机抽样。比如说当前观测到状态 sss,policy 函数会告诉我们每个动作的概率有多大,比如左为 0.2,右为 0.1,上为 0.7
- 另一个随机性来源是状态转移,假定 agent 做出了向上跳的动作,环境要生成下一个状态 S′S'S′ ,这个状态 S′S'S′ 具有随机性,环境用状态转移函数 ppp 算出概率,然后用概率来抽样得到下一个状态 S′S'S′
- 比如图中根据状态转移函数的计算,转移到左边的状态的概率是 0.8,转移到右边的状态的概率是 0.2,这两个都有可能成为下一个状态,系统会做随机抽样来决定下一个状态
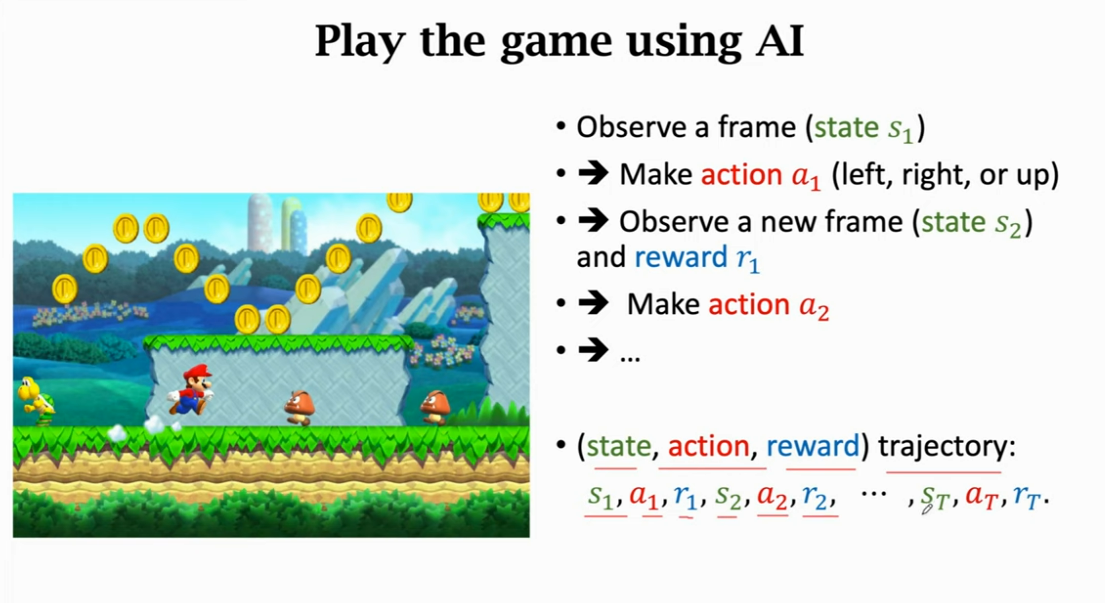
Play the game using AI
- 我们用强化学习学出来 policy 函数 π\piπ,AI 就是用 policy 函数来控制 agent
- 观测到当前游戏帧状态 s1s_1s1
- → 用 policy 函数来算一个概率,然后抽样得到动作 a1a_1a1
- → 环境会生成下一个状态 s2s_2s2 和给 agent 奖励 r1r_1r1
- → 用 policy 函数来算一个概率,然后抽样得到动作 a2a_2a2
- → ···
- 这样我们就可以得到游戏的轨迹,这个轨迹是每一步的状态,动作,奖励,一直到游戏结束
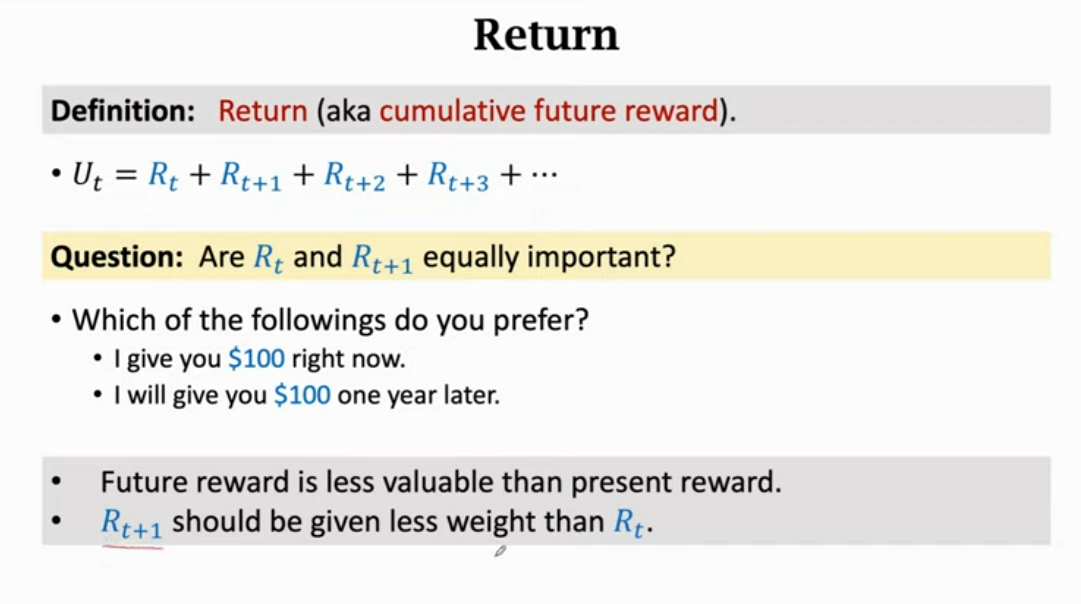
奖励和回报(Rewards and Returns)
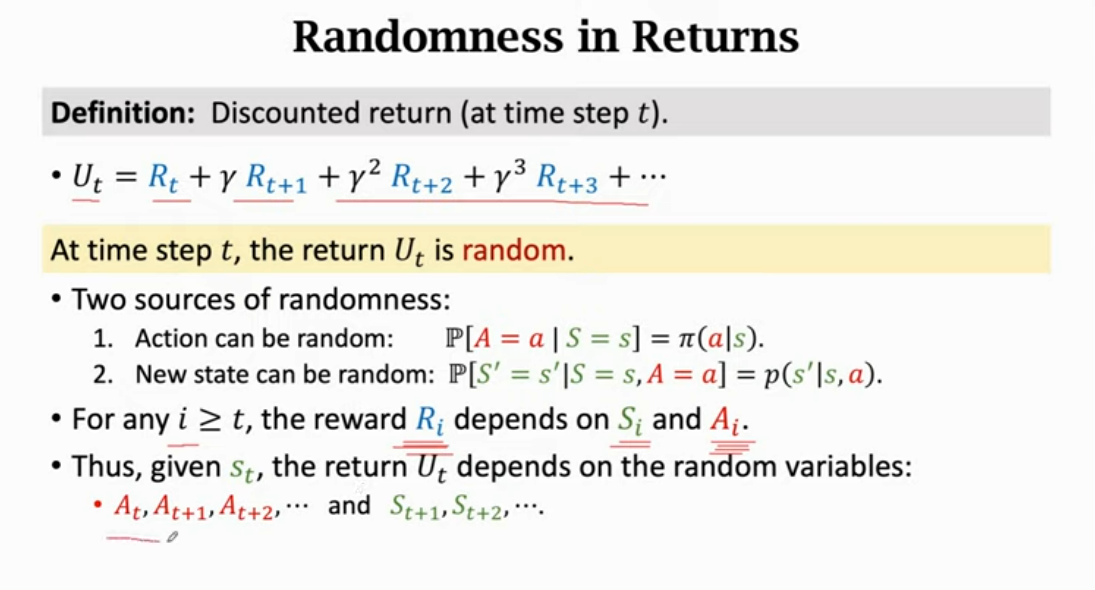
- 回报:未来的累计奖励
- Ut=Rt+Rt+1+Rt+2+Rt+3+⋅⋅⋅U_t=R_t+R_{t+1}+R_{t+2}+R_{t+3}+···Ut=Rt+Rt+1+Rt+2+Rt+3+⋅⋅⋅
- 问题:奖励 RtR_tRt 和 Rt+1R_{t+1}Rt+1 同样重要吗?
- 你更喜欢哪个选项?:
- 立即给你 100 块
- 一年后再给你 100 块
- 理性的人应该都是选 100 块,明年得到 100 块不如立刻得到 100 块。但是如果选项变成了立即的只能给 80 块,那么大家的选择就有可能不一样了
- 所以未来的奖励比现在的奖励价值要低,比如未来的 100 可能只值现在的 80
- 需要给未来的奖励打一个折扣,比如 8 折
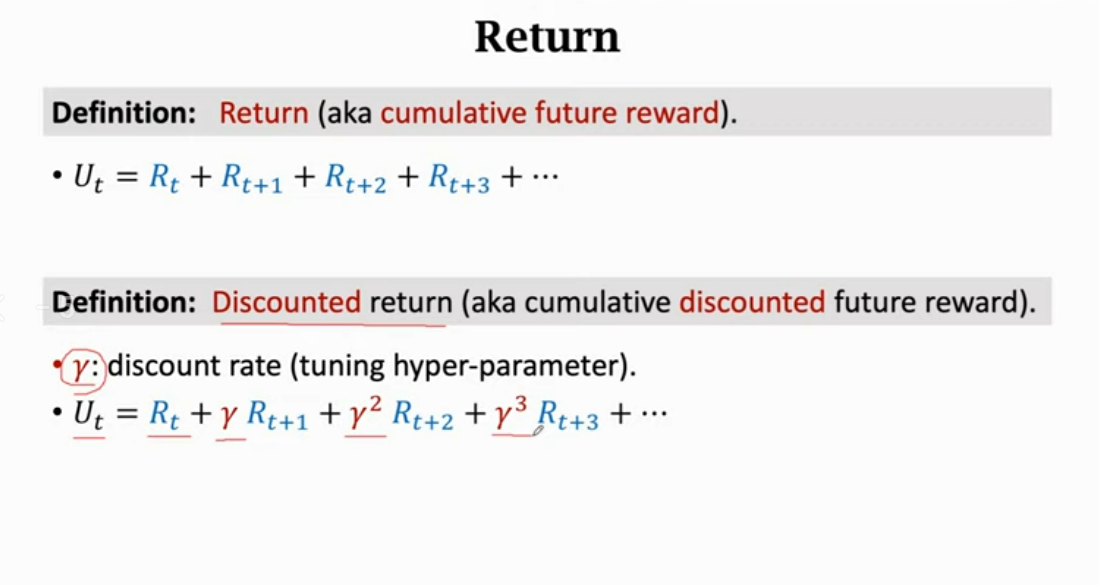
- 折扣回报:打折扣的未来累计奖励
- γ\gammaγ:折扣率(可调整的超参数),折扣率的设置对强化学习的结果有一定影响
- Ut=Rt+γRt+1+γ2Rt+2+γ3Rt+3+⋅⋅⋅U_t=R_t+\gamma R_{t+1}+ \gamma^2 R_{t+2}+ \gamma^3 R_{t+3}+···Ut=Rt+γRt+1+γ2Rt+2+γ3Rt+3+⋅⋅⋅
- UtU_tUt 是随机的,它有两个随机性来源:动作和新状态的随机性,如上面所述,而对于 ttt 之后的奖励,它会依赖于当前的状态和动作
- 比如马里奥向上跳吃到了金币,就得到了一个正的奖励。马里奥向右走碰到了一个敌人,就会得到一个很大的副奖励
- 所以给定 sts_tst,那么 UtU_tUt 就取决于:At,At+1,At+2,⋅⋅⋅A_t,A_{t+1},A_{t+2},···At,At+1,At+2,⋅⋅⋅
和 St+1,St+2,⋅⋅⋅S_{t+1},S_{t+2},···St+1,St+2,⋅⋅⋅
价值函数(Value Functions)
- UtU_tUt 是一个随机变量,在 ttt 时刻并不知道 UtU_tUt 是什么。比如抛硬币,你在 ttt 时刻还没把它抛出去,所以你也并不知道会得到 1 还是 0
- 如上 UtU_tUt 依赖于后面的动作和状态
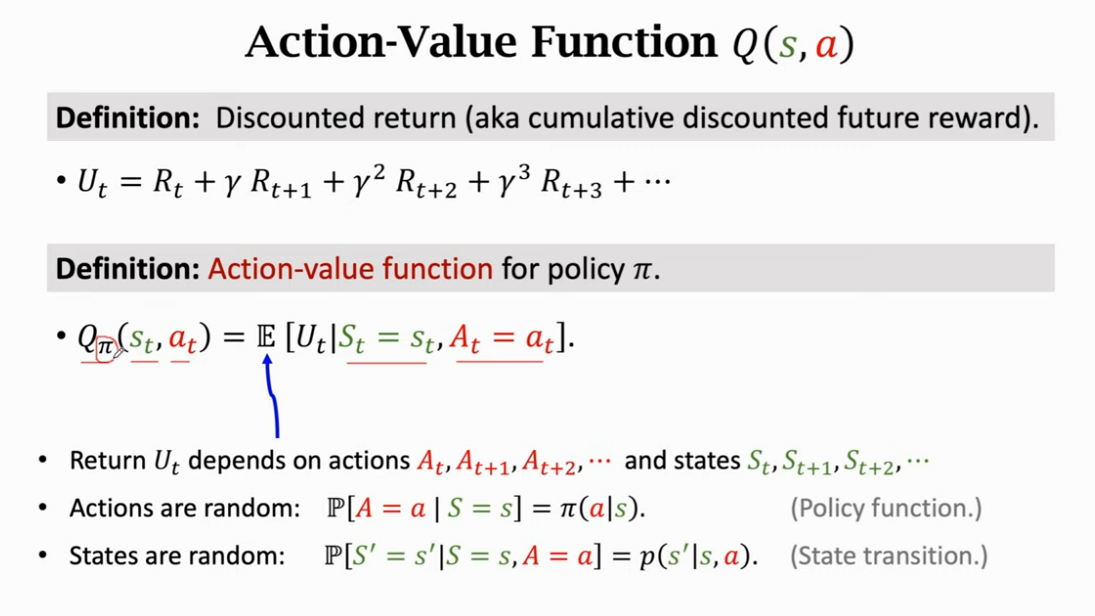
- 在 ttt 时刻我并不知道 UtU_tUt是什么,那我怎么评估当前的形势?此时就可以用到期望,把里面的随机性都用积分给积掉,得到一个实数。比如虽然抛硬币前不知道会得到什么,但是知道正反都是0.5,那么正面的期望(或反面)的就是0.5。同理对随机变量 UtU_tUt 求期望得到一个数记作 QπQ_{\pi}Qπ
- 把 UtU_tUt 当作未来所有状态和所有动作的一个函数,未来的动作和状态都有随机性,动作的概率密度函数是 policy 函数 π\piπ,状态 s 的概率函数是状态转移函数 ppp,期望就是对未来的动作和状态求的。那么除了 sts_tst 和 ata_tat,其余随机变量都被积掉了。
- 被积掉的随机变量是 At+1,At+2,⋅⋅⋅A_{t+1},A_{t+2},···At+1,At+2,⋅⋅⋅ 以及 St+1,St+2S_{t+1},S_{t+2}St+1,St+2 等
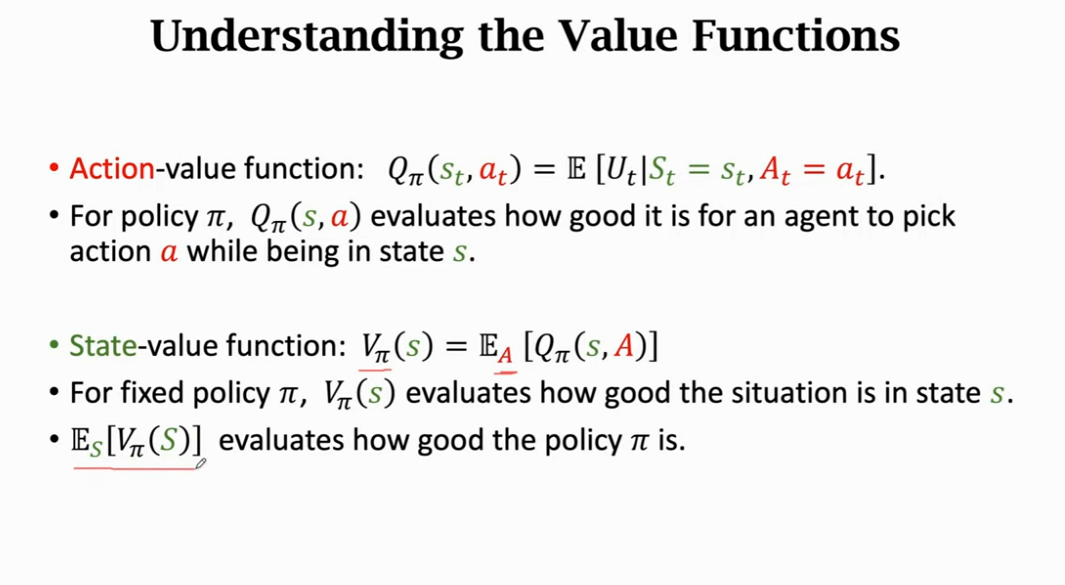
- 求期望得到的函数 QπQ_{\pi}Qπ 被称为动作价值函数,它只和 sts_tst 和 ata_tat 有关,因为未来的都被积掉了。而 sts_tst 和 ata_tat 被作为观测到的数值来对待而不是随机变量,QπQ_{\pi}Qπ 的值依赖于 sts_tst 和 ata_tat,QπQ_{\pi}Qπ 还与 policy 函数 π\piπ 有关,因为积分的时候会用到 policy 函数,如果 policy 函数不一样,得到的 QπQ_{\pi}Qπ 就会不一样
- 动作价值函数的直观意义:如果用 policy 函数 π\piπ ,那么在sts_tst 下做 ata_tat是好还是坏, QπQ_{\pi}Qπ 就会给当前的所有动作打分,是好还是坏
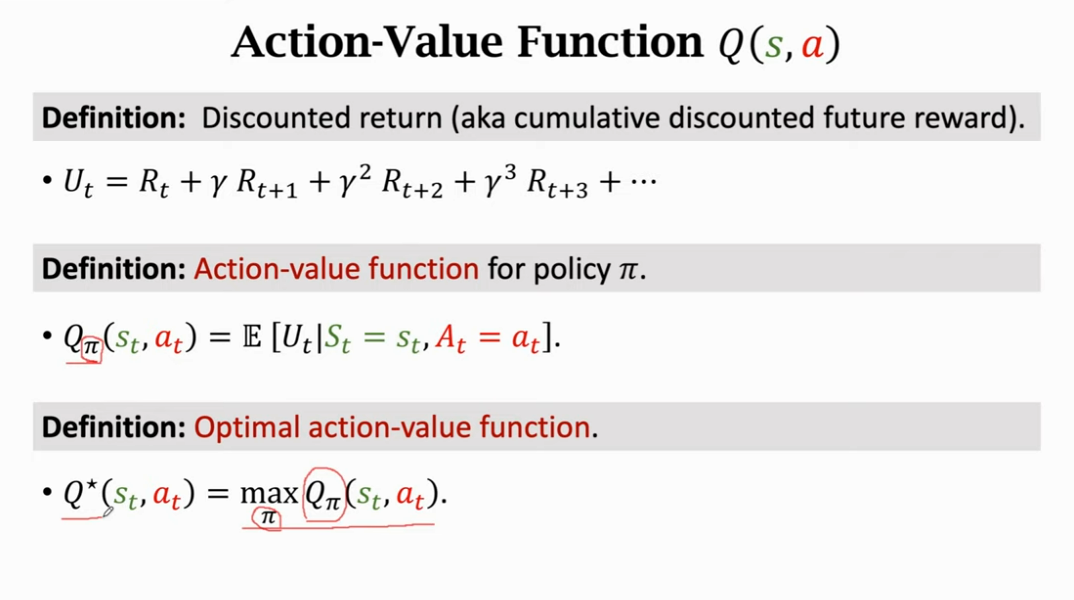
- QπQ_{\pi}Qπ 中去掉 π\piπ 的方法:对所有的 π\piπ 求一个最大值,我们有无数种 policy 函数,但是我们要用最好的那个 policy 函数,即让 QπQ_{\pi}Qπ 最大的 policy 函数,它叫做最优动作价值函数(Optimal action-value function)
- 它的意义是对动作 ata_tat 做评价,agent 可以直接根据 Q∗Q^*Q∗ 来对动作做决策
- 状态价值函数(State-value function),这里它和 QπQ_{\pi}Qπ,状态,动作都有关,这里可以以 AAA 为变量,然后求期望把 AAA 削掉,求期望得到的 VπV_{\pi}Vπ 只和 π\piπ 和 sts_tst 有
- 意义:VπV_{\pi}Vπ 可以告诉我们当前的局势好不好,假如根据 policy 函数来下围棋,VπV_{\pi}Vπ 可以告诉我当前的是不是快赢了或者快输了或者不分高下
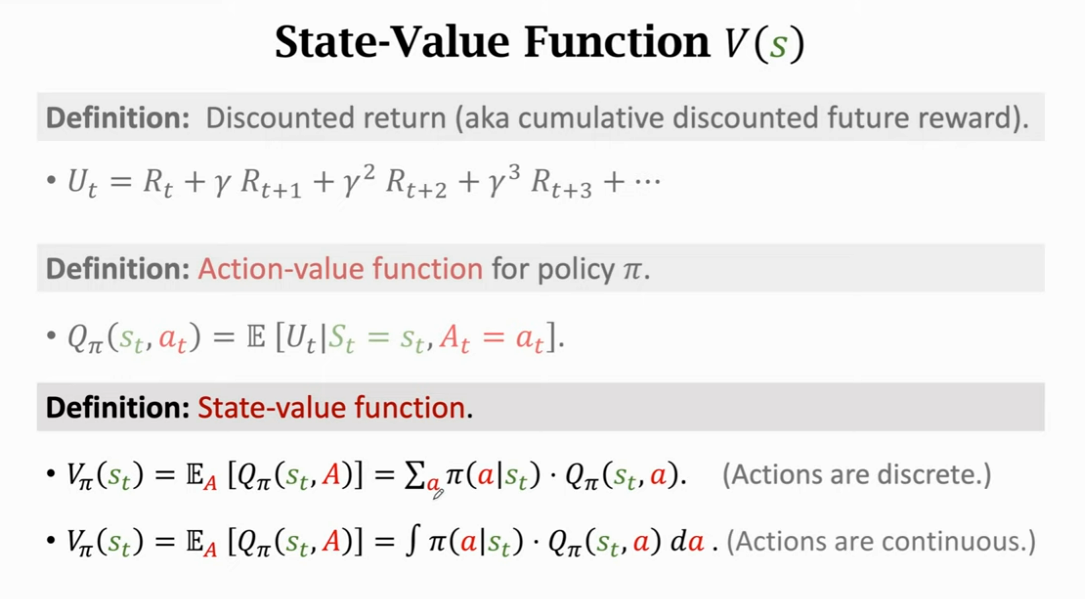
- QπQ_{\pi}Qπ 可以给动作打分,评估这个动作好不好,当状态为 sss 时
- VπV_{\pi}Vπ 和动作 A 无关,如果使用 policy π\piπ ,那么 VπV_{\pi}Vπ 可以评估当前状态 sss 好不好
- ES[Vπ(S)]E_S[V_{\pi}(S)]ES[Vπ(S)] 可以评估 policy π\piπ 好不好
How does AI control the agent
- 假如我们玩超级玛丽,我们的目标是多吃金币并赢得游戏
- 一种办法是学习一个 policy 函数 π(a∣s)\pi(a|s)π(a∣s),这个叫 policy based learning,后面会讲。假如我们有一个 π\piπ,我们就可以用它控制 agent 做动作
- 每观测到一个状态 sts_tst,就把 sts_tst 作为 π\piπ 的输入,π\piπ 函数会输出每个动作的概率,随机抽样得到动作 ata_tat,agent 会执行这个动作 ata_tat

- 另一种办法是学习最优动作价值函数 Q∗(s,a)Q^*(s,a)Q∗(s,a),这个在强化学习里面叫 value based learning,价值学习,下节课讲
- 假如我们有了 Q∗Q^*Q∗,agent 就可以根据 Q∗Q^*Q∗ 函数来做动作了,Q∗Q^*Q∗ 可以告诉我们如果处在状态 sts_tst,那么做动作 aaa 是好还是坏。我们可以知道所有动作下的 Q 值大不大,假如向上跳的 Q 值最大,agent 就应该向上跳。Q 值是对未来奖励总和的期望,如果向上跳的 Q 值最大,那么说明向上跳更容易在未来得到更多的奖励
- 用数学公式可以表示如下

- 以上两种方法学到其中之一就可以了,后面的课程会围绕这两种来进行学习
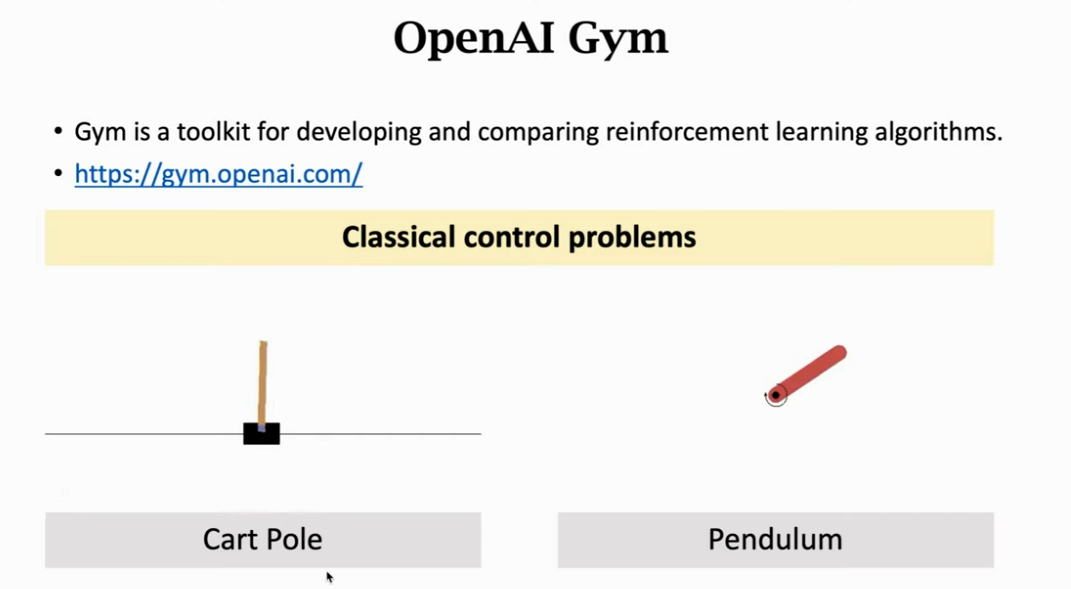
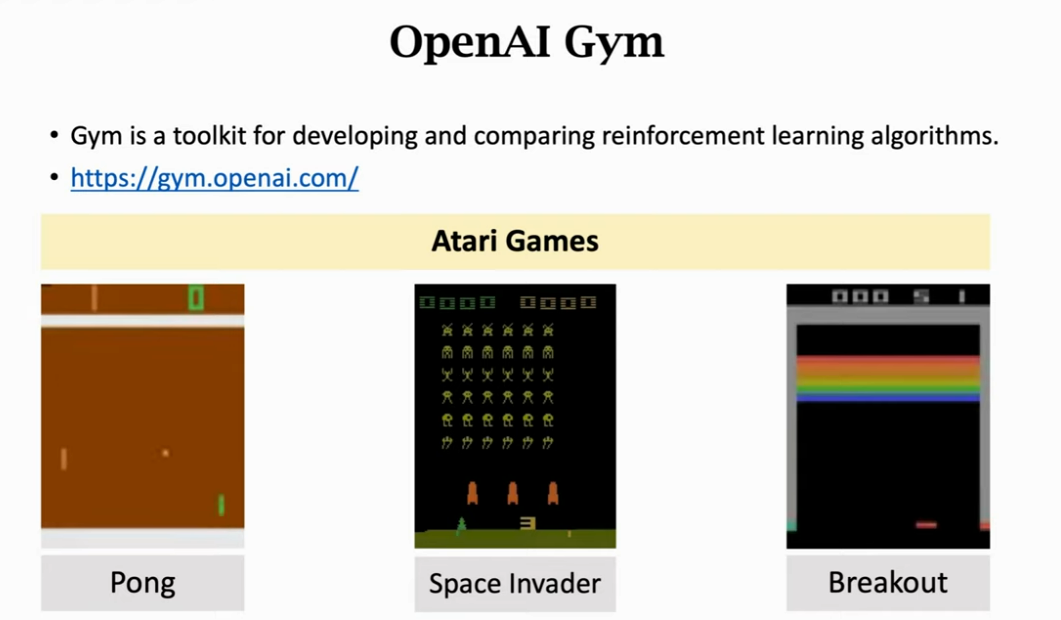
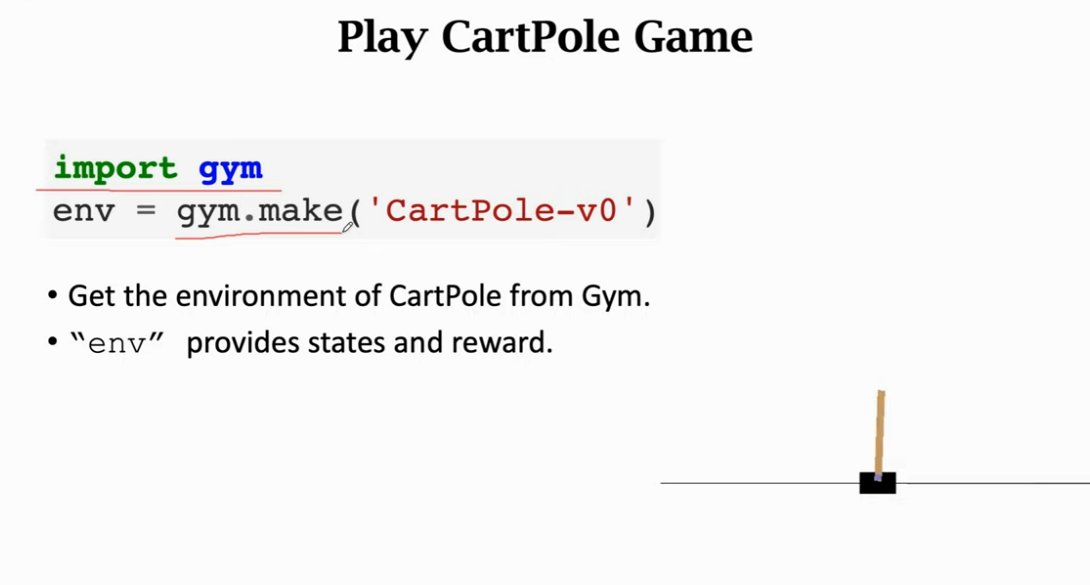
OpenAI Gym
- 如果你学习到了一个 π\piπ 函数或者 Q∗Q^*Q∗ 函数,你就可以把算法用在控制问题上或者小游戏上
- OpenAI Gym 是强化学习最常用的标准库,Gym 有几大类控制问题,第一种是经典控制问题,比如 Cart Pole 和 Pendulum
- 第二种是 Atari Game,在小霸王游戏机上的游戏
- 第三种是连续控制问题
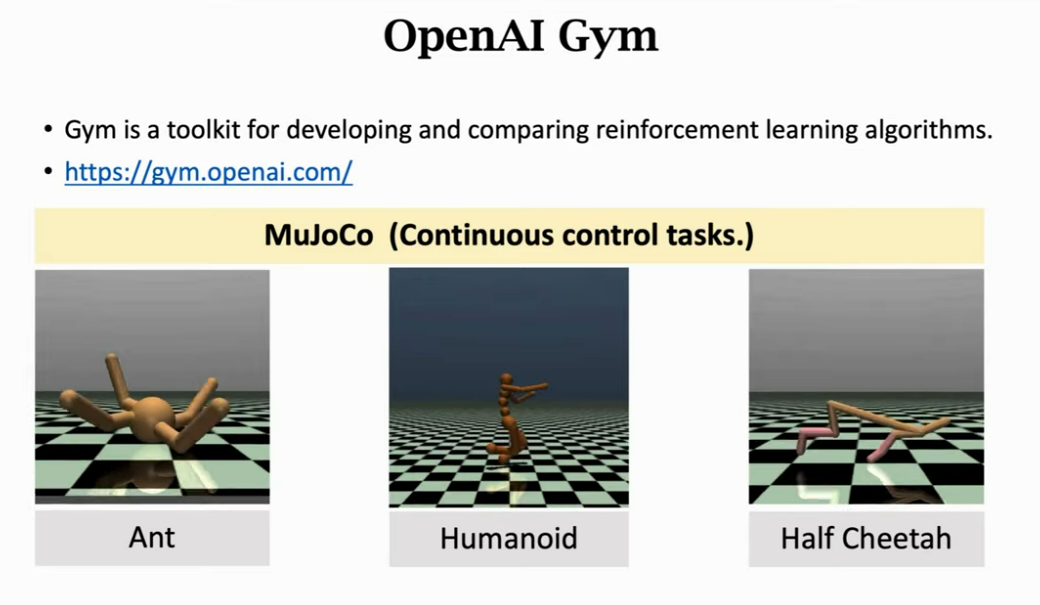
- 所有强化学习学者都会用 Gym 来检验算法
- 用 Gym 做实验很容易,装好之后就可以调用了

Summary
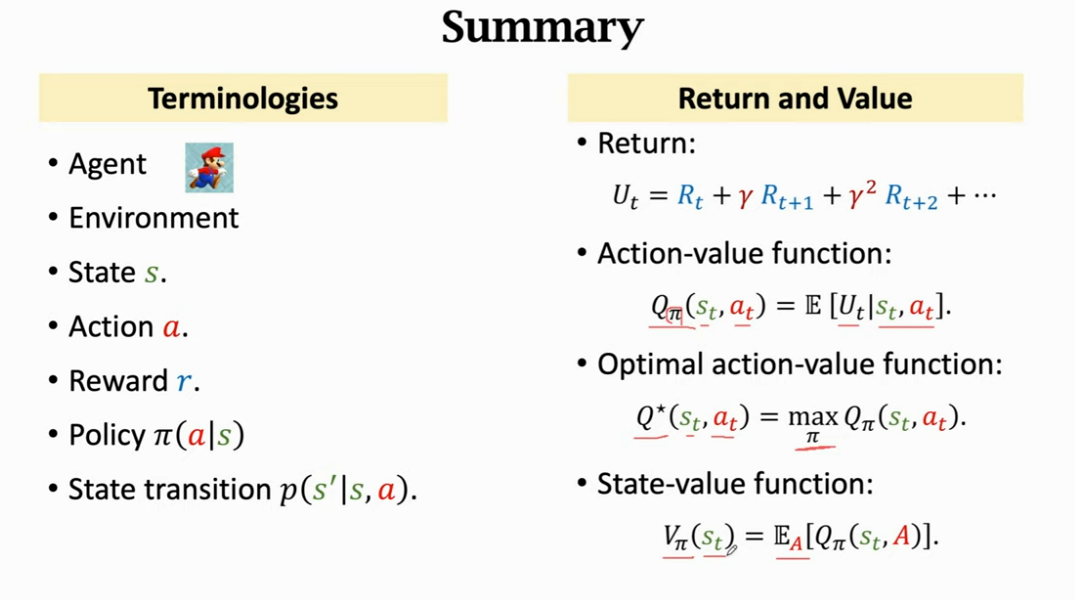
术语
- Agent:动作的主体,比如超级玛丽中的马里奥
- Environment:agent 可以和环境交互,超级玛丽中的环境就是游戏本身
- State sss:在超级玛丽中你可以理解为当前显示的画面,游戏玩家会根据画面进行操作
- Action aaa:agent 做出动作后,环境就会更新状态 sss,并且给出一个奖励 rrr
- Reward rrr:
- 如果状态,动作,奖励等被观测到就用小写字母表示,如果没有被观测到就是一个随机变量,用大写字母表示
- Policy π(a∣s)\pi(a|s)π(a∣s):观测到状态 sss,Policy 会输出每个动作的概率
- State transition p(s′∣s,a)p(s'|s,a)p(s′∣s,a):我们是不知道的,环境通过 p(s′∣s,a)p(s'|s,a)p(s′∣s,a) 来随机选择下一个状态
Return and Value
- 回报 Return:把未来所有的奖励都进行加权求和,我们希望 UtU_tUt 越大越好,UtU_tUt 是一个随机变量,随机性来自于未来所有状态和动作,由于 UtU_tUt 的随机性我们在 t 时刻并不知道 UtU_tUt 是什么,只有当 agent 玩完游戏才能被观测到,想要在当前就对 Return 就有一个预估的话,可以对其求期望,把其中的随机变量都消掉
- Ut=Rt+γRt+1+γ2Rt+2+γ3Rt+3+⋅⋅⋅U_t=R_t+\gamma R_{t+1}+ \gamma^2 R_{t+2}+ \gamma^3 R_{t+3}+···Ut=Rt+γRt+1+γ2Rt+2+γ3Rt+3+⋅⋅⋅
- 动作价值函数 Action-value function:就是对 UtU_tUt 的期望,除了当前状态 sts_tst 和 ata_tat,其余随机变量被期望消除了,它只和 sts_tst 和 ata_tat 以及 π\piπ 有关
- Qπ(st,at)=E[Ut∣st,at]Q_{\pi}(s_t,a_t)=E[U_t|s_t,a_t]Qπ(st,at)=E[Ut∣st,at]
- 如果使用 Policy 函数 π\piπ,那么 QπQ_{\pi}Qπ 可以告诉我们在状态 sts_tst 的情况下做出 ata_tat 是好还是坏
- 最优动作价值函数 Optimal action-value function:无论用什么样的 Policy 函数,在状态 sts_tst 做动作 ata_tat 的最高回报只能是 Q∗Q^*Q∗

- 状态价值函数 State-value function:再求一次期望,把 QπQ_{\pi}Qπ 中的 aaa 也给去掉了,VπV_{\pi}Vπ 可以评价状态 sss 和 Policy 的好坏。如果给定 Polcy 和状态 sss,可以告诉我们目前的情况是好是坏,是快赢了还是快输了
- Vπ=EA[Qπ(st,A)]V_{\pi}=E_A[Q_{\pi}(s_t,A)]Vπ=EA[Qπ(st,A)]
- Vπ=EA[Qπ(st,A)]V_{\pi}=E_A[Q_{\pi}(s_t,A)]Vπ=EA[Qπ(st,A)]
Play game using reinforcement learning
- 强化学习就是学习怎么控制 agent 基于当前状态做出相应动作,争取能在未来获得相应的奖励
- 流程是观测到状态 sts_tst,agent 会做出动作 ata_tat,然后环境会根据 sts_tst 和 ata_tat 来更新状态,给出新的状态 st+1s_{t+1}st+1 和奖励 rtr_trt,然后开始下一轮
- 通常是学习 Policy 函数 π(a∣s)\pi(a|s)π(a∣s) 或者 Q∗Q^*Q∗,agent 就可以根据这个玩游戏了
- 假如知道 π\piπ,就可以把状态 sss 作为输入,输出每个动作的概率,然后做一个随机抽样得到相应的动作 aaa
- 假如知道了 Q∗Q^*Q∗,就可以用它来评价当前状态下每一个动作的好坏,从而选出 Q 值最高的动作
接下来要学习的内容