GPIO总结
一.GPIO基本概念
<1>什么是GPIO?基本功能是什么?
定义:GPIO(全称是通用输入输出端口)是微控制器上可以由用户程序控制的引脚,可以配置为输入或输出模式。GPIO 不是专用接口(如 USB、UART),而是 “通用” 接口,本质是芯片上可灵活配置的引脚,能实现与外部设备的简单数据交互。
基本功能:输入模式(Input Modes),输出模式(Output Modes),中断功能(Input Interrupt), 模拟通信协议,PWM 信号输出(软件 / 硬件)
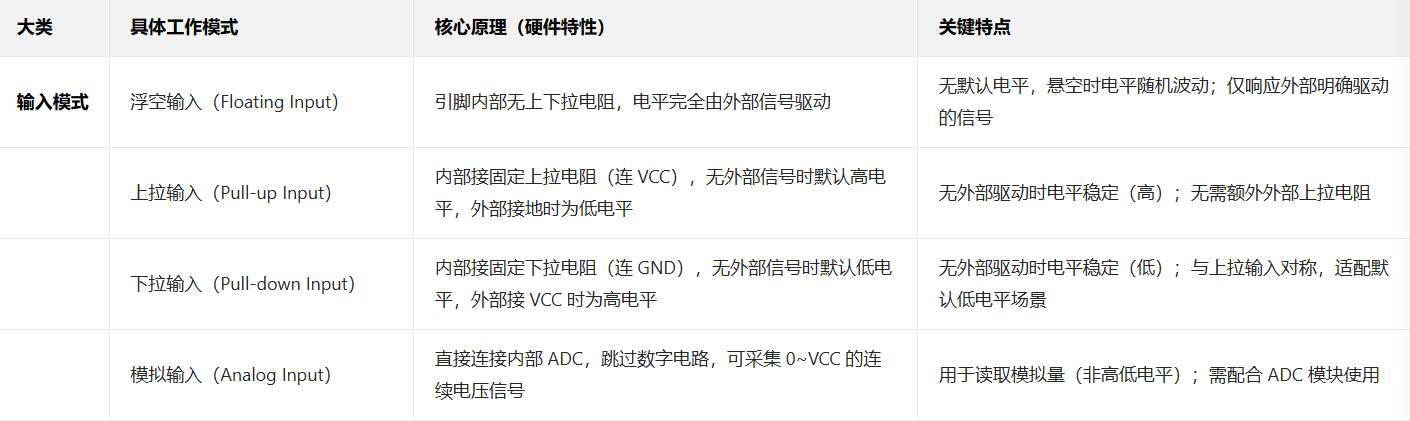
1.输入模式(Input Modes)
浮空输入(Floating Input):引脚不接上下拉电阻,电平完全由外部信号决定(如悬空时电平不稳定)。应用:读取外部明确驱动的信号(如传感器输出的数字电平)。
上拉输入(Pull-up Input):内部接固定上拉电阻(通常接电源 VCC),无外部信号时默认高电平;外部接地时变为低电平。应用:检测按键(按键未按下时引脚被上拉为高,按下时接地为低,无需外部电阻)。
下拉输入(Pull-down Input):内部接固定下拉电阻(通常接地 GND),无外部信号时默认低电平;外部接 VCC 时变为高电平。应用:与上拉输入对称,适用于外部信号默认需要低电平的场景。
模拟输入(Analog Input):引脚直接连接内部 ADC(模数转换器),用于读取连续的模拟电压(而非离散的高低电平)。应用:读取光敏电阻、 potentiometer(电位器)等模拟传感器的电压信号。
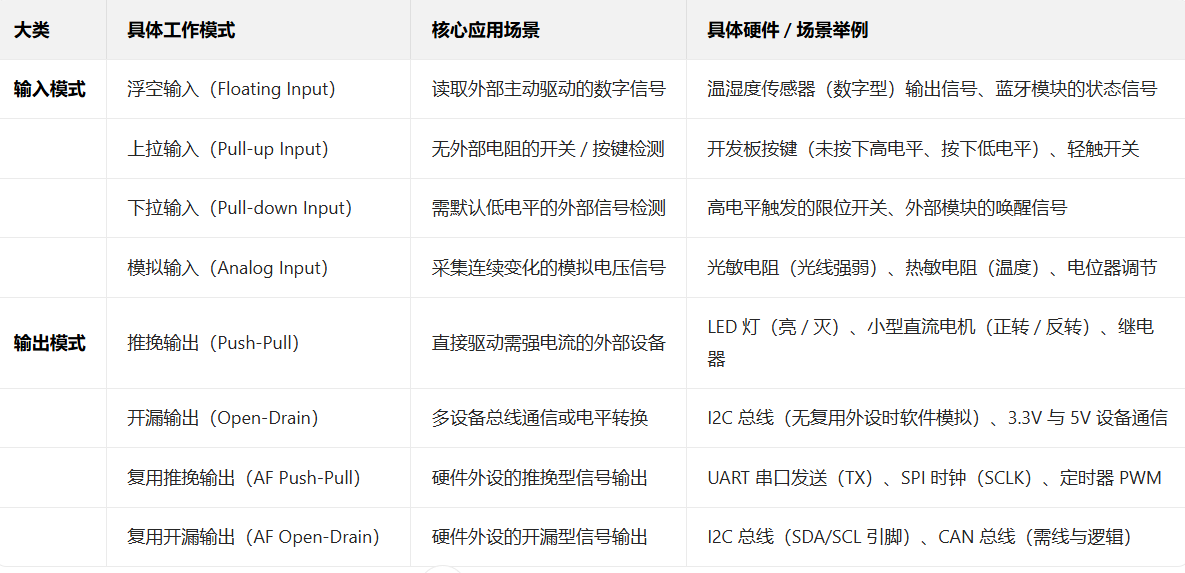
2.输出模式(Output Modes)
推挽输出(Push-Pull Output):引脚可通过内部 MOS 管直接输出高电平(接 VCC)或低电平(接地),驱动能力强(可直接驱动 LED、继电器等)。特点:高低电平均有主动驱动能力,输出阻抗低。
开漏输出(Open-Drain Output):仅能主动输出低电平(接地),输出高电平时需依赖外部上拉电阻(或内部上拉)。应用:实现 “线与” 逻辑(多个开漏输出引脚接同一总线,任意引脚输出低则总线为低);电平转换(通过外部上拉电阻匹配不同电压的设备,如 3.3V 与 5V 设备通信)。
复用输出(Alternate Function Output):引脚不作为通用 IO,而是复用为芯片内部硬件外设的接口(如 UART 的 TX/RX、SPI 的 SCLK、PWM 输出等)。应用:通过 GPIO 引脚使用硬件外设功能(如用 PA9 引脚作为 USART1 的发送端)。
3.扩展功能(软件与硬件结合)
中断功能(Input Interrupt):GPIO 输入模式下可配置为 “中断触发源”,通过检测引脚电平变化(上升沿、下降沿、双边沿或电平触发),触发 CPU 中断服务程序(ISR)。
优势:无需 CPU 持续轮询,实时响应外部事件(如按键按下、传感器触发)。应用:紧急停止按钮、限位开关触发、外部设备唤醒。
模拟通信协议:通过软件控制 GPIO 引脚的高低电平变化节奏,可模拟简单的串行通信协议(替代硬件外设):用两个 GPIO 分别模拟 TX(发送)和 RX(接收),通过延时控制电平持续时间(如波特率 9600 对应每 bit 约 104us)。用 GPIO 模拟时钟线(SCL/SCLK)和数据线(SDA/MOSI/MISO),通过时序控制实现数据传输(适用于芯片外设资源不足时)。
PWM 信号输出(软件 / 硬件)
<2>GPIO 的常见工作模式有哪些?

二. GPIO 配置与使用
1.以 STM32 为例的 GPIO 配置:
// 配置 GPIO 为输出模式
void GPIO_OutputConfig(void) {// 使能 GPIO 时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 定义 GPIO 初始化结构体GPIO_InitTypeDef GPIO_InitStructure;// 配置 PA5 为推挽输出,50MHzGPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
}
// 配置 GPIO 为输入模式
void GPIO_InputConfig(void) {// 使能 GPIO 时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);// 定义 GPIO 初始化结构体GPIO_InitTypeDef GPIO_InitStructure;// 配置 PB1 为上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOB, &GPIO_InitStructure);
}2.什么是 GPIO 的上拉和下拉电阻?它们的作用是什么?
下拉电阻:一端连接 GPIO 引脚,另一端连接地(GND)的电阻。这两种电阻可以是芯片内部集成(通过软件配置启用),也可以是外部额外焊接的独立电阻(根据需求选择阻值,通常 1kΩ~100kΩ)。
核心作用:<1>将引脚默认拉至高/低电平。<2>防止 引脚“悬空” 导致的电平不确定, 提高信号抗干扰能力<3>适用于连接常开开关、按键等(上拉),适用于连接常闭开关等(下拉)。<4>定义引脚的默认电平状态。<5>防止输入引脚处于高阻态时受干扰。<5>限制电流,保护 GPIO 和外部设备。
GPIO 引脚若未接外部信号(如按键未按下、传感器未输出),且无上下拉电阻,会处于 “悬空” 状态:此时引脚电平会受环境电磁干扰、电路寄生电容等影响,随机波动(可能在高 / 低电平之间跳变)。上拉 / 下拉电阻通过 “强制” 引脚在无外部信号时保持固定电平(上拉→高电平,下拉→低电平),避免不确定性。上拉 / 下拉电阻相当于给引脚提供了一个 “稳定的参考电平”,噪声信号需克服电阻的分压作用才能改变引脚电平,从而降低误触发概率。
3.推挽输出和开漏输出有什么区别?各自适用于什么场景?
驱动感性 / 阻性负载:如驱动 LED、继电器、小型电机,高低电平都能提供足够电流。高速信号传输:如 SPI 总线的 MOSI、MISO 线、UART 的 TX/RX 线,推挽的快速电平切换能减少信号延迟。单节点控制:如 GPIO 控制按键检测(输出高低电平触发)、传感器的控制信号。
开漏输出:<1>仅包含 N 沟道 MOS 管(或 NPN 三极管),P 沟道管省略。<2> 输出低电平时:N 沟道管导通,拉到 GND;输出高电平时:MOS 管截止,无法主动输出高电平,需外部上拉电阻拉到 VCC。<3>支持 “线与”逻辑(多设备共用总线,只要有一个输出低,总线就是低;全部截止时,上拉拉高)<4>必须外接上拉电阻(否则只能输出低电平,高电平无效)。
适用场景:多设备共享总线、需电平转换场景
多设备共享总线:最典型的是 I2C 总线(SDA、SCL 线),多个从设备和主设备共用两根线,通过开漏的 “线与” 实现信号同步,避免冲突。
电平转换需求:如 5V 设备和 3.3V 设备通信,开漏输出外接 5V 上拉电阻,即可实现 3.3V 芯片输出 5V 电平,兼容不同电压域。
多设备控制同一信号:如多个芯片共享一个中断线(INT),任何一个芯片输出低电平即可触发中断,符合 “线与” 逻辑。
三.GPIO 中断与防抖
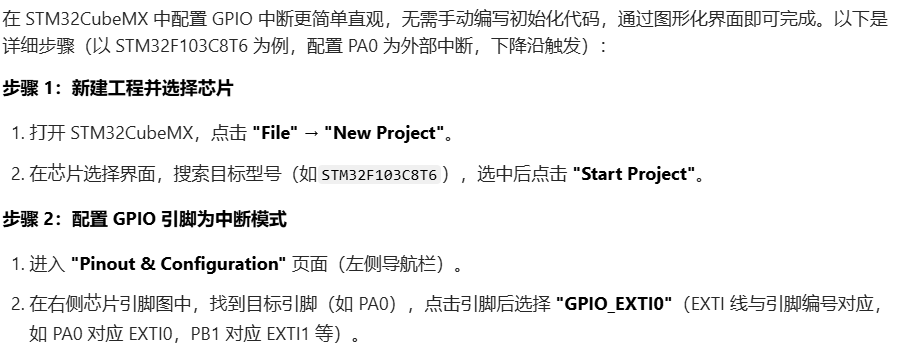
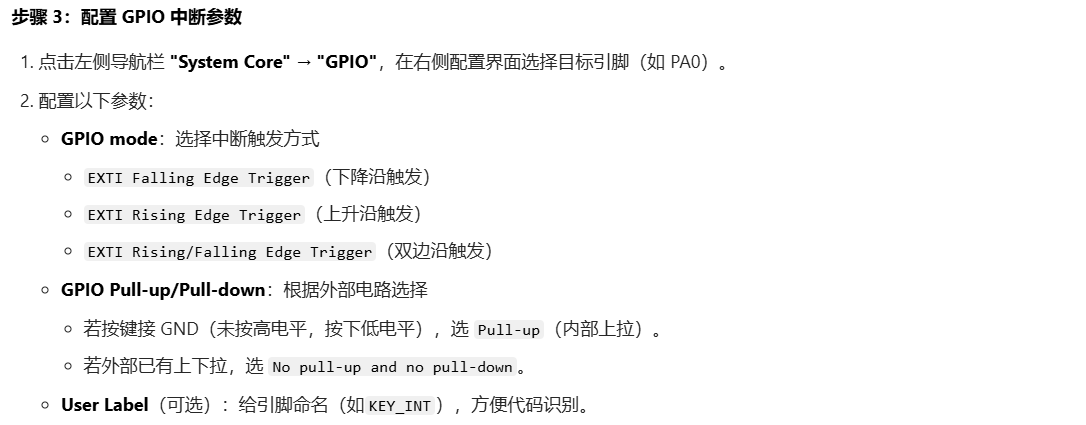
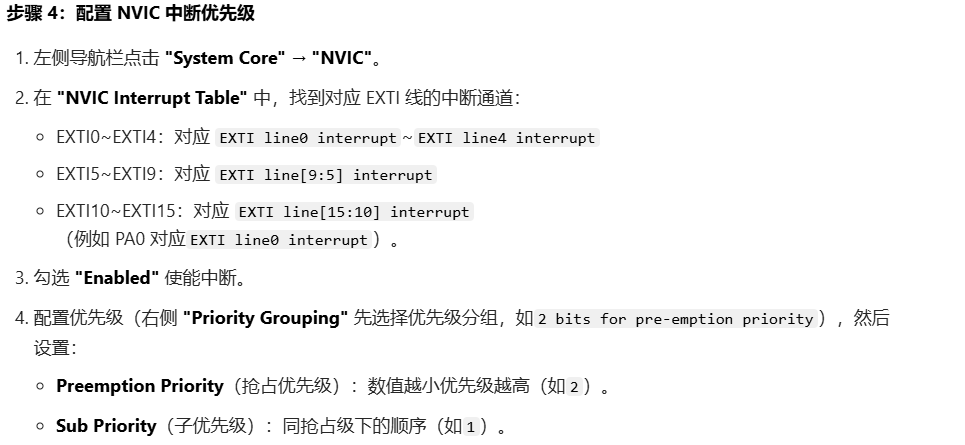
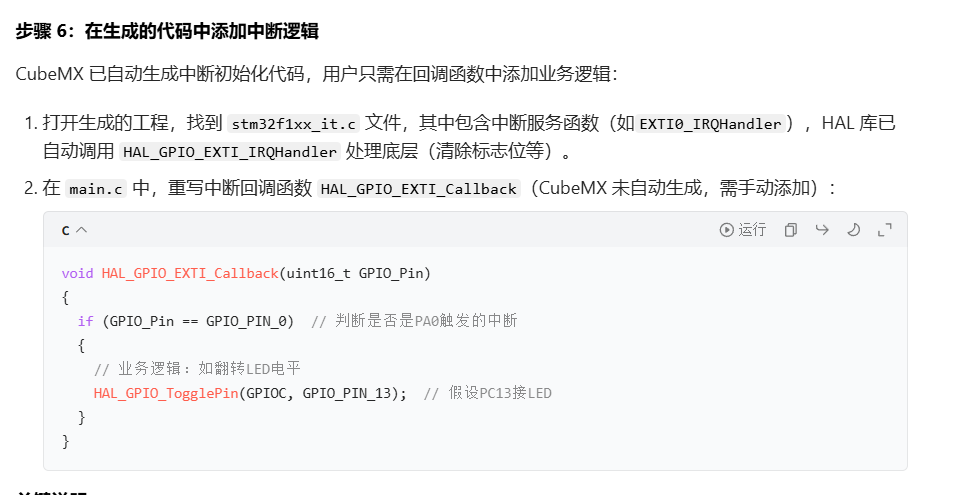
1.GPIO 中断配置步骤(以 STM32 为例HAL库):
2.什么是按键抖动?如何实现按键消抖?
bool Button_Read(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) {if(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == 0) {delay_ms(20); // 延时 20msif(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == 0) {return true; // 按键按下}}return false;
}
<2>定时器采样消抖:
// 定时器采样消抖
#define DEBOUNCE_COUNT 5
uint8_t button_samples[DEBOUNCE_COUNT] = {0};
uint8_t sample_index = 0;// 在定时器中断中调用(如 10ms 周期)
void Button_SampleInTimer(void) {// 读取当前按键状态button_samples[sample_index] = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0);sample_index = (sample_index + 1) % DEBOUNCE_COUNT;//索引自增后取模,实现循环写入(例如索引从 0→1→2→3→4→0...),保证数组始终保存最近 5 次的采样数据。// 检查是否所有样本一致bool all_same = true;for (int i = 1; i < DEBOUNCE_COUNT; i++) {if (button_samples[i] != button_samples[0]) {all_same = false;break;}}if (all_same) {// 按键状态稳定,可以处理button_state = button_samples[0];}
}四.GPIO 性能与优化
1.GPIO 的驱动能力是什么?如何提高 GPIO 的驱动能力?
2.如何优化 GPIO 操作的效率?
// 标准库函数方式
GPIO_SetBits(GPIOA, GPIO_Pin_5);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
// 寄存器直接操作方式(更高效)
GPIOA->BSRR = GPIO_Pin_5; // 置位
GPIOA->BRR = GPIO_Pin_5; // 复位
// 或者
GPIOA->ODR |= GPIO_Pin_5; // 置位
GPIOA->ODR &= ~GPIO_Pin_5; // 复位<2>使用位带操作(适用于支持位带的 MCU,如 STM32):
// 定义位带别名
#define PAout(n) *(volatile uint32_t*)(0x42000000 + (GPIOA_BASE + 0x0C - 0x40000000) *
32 + n * 4)
#define PAin(n) *(volatile uint32_t*)(0x42000000 + (GPIOA_BASE + 0x08 - 0x40000000) *
32 + n * 4)
// 使用位带操作
PAout(5) = 1; // 设置 PA5 为高电平
PAout(5) = 0; // 设置 PA5 为低电平
uint8_t status = PAin(0); // 读取 PA0 状态
// 一次性设置多个引脚
GPIOA->BSRR = (GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7);
// 一次性清除多个引脚
GPIOA->BRR = (GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7);
// 一次性读取整个端口
uint16_t port_value = GPIOA->IDR;五.GPIO 应用与实战经验
<1>如何实现 GPIO 控制的 PWM 输出?
// 软件 PWM 实现
#define PWM_PERIOD 100 // PWM 周期
uint8_t pwm_duty = 50; // PWM 占空比(0-100)
uint8_t pwm_counter = 0;// 在定时器中断中调用(如 1kHz 频率)
void SoftPWM_Update(void) {pwm_counter = (pwm_counter + 1) % PWM_PERIOD;if (pwm_counter < pwm_duty) {// 输出高电平GPIO_SetBits(GPIOA, GPIO_Pin_5);} else {// 输出低电平GPIO_ResetBits(GPIOA, GPIO_Pin_5);}
}// 设置 PWM 占空比
void SoftPWM_SetDuty(uint8_t duty) {if (duty <= PWM_PERIOD) {pwm_duty = duty;}
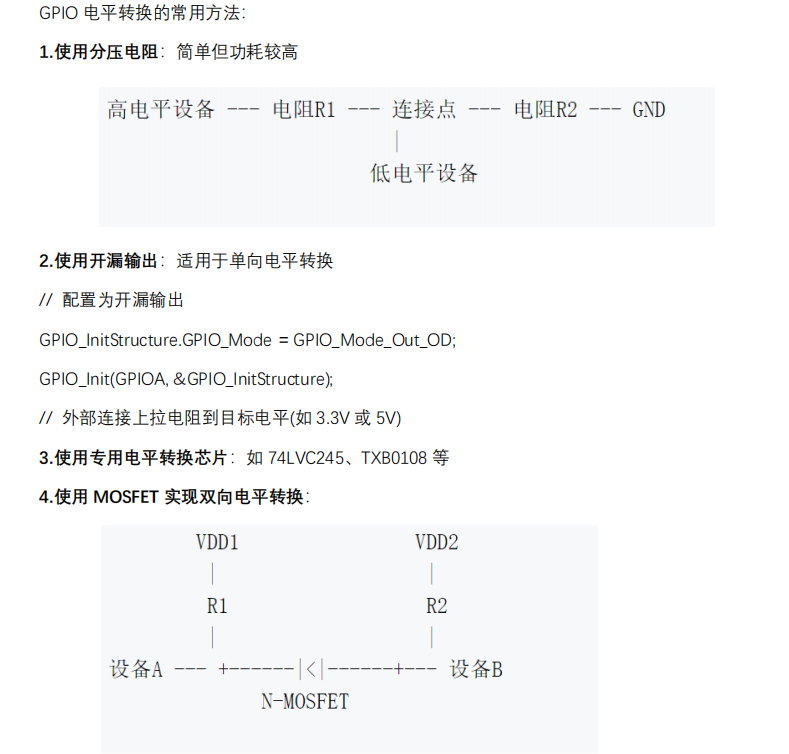
}<2>如何实现 GPIO 的电平转换?
<3>如何保护 GPIO 免受过压和静电损坏?
六.高级 GPIO 应用
// GPIO 模拟 I2C
#define SCL_H() GPIOB->BSRR = GPIO_Pin_6
#define SCL_L() GPIOB->BRR = GPIO_Pin_6
#define SDA_H() GPIOB->BSRR = GPIO_Pin_7
#define SDA_L() GPIOB->BRR = GPIO_Pin_7
#define SDA_READ() ((GPIOB->IDR & GPIO_Pin_7) != 0)// 配置 SDA 为输入
void SDA_IN(void) {GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOB, &GPIO_InitStructure);
}// 配置 SDA 为输出
void SDA_OUT(void) {GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}// I2C 起始信号
void I2C_Start(void) {SDA_OUT();SDA_H();SCL_H();delay_us(4);SDA_L();delay_us(4);SCL_L();
}// I2C 停止信号
void I2C_Stop(void) {SDA_OUT();SCL_L();SDA_L();delay_us(4);SCL_H();delay_us(4);SDA_H();delay_us(4);
}// 等待应答
bool I2C_WaitAck(void) {uint8_t timeout = 0;SDA_IN();SDA_H();delay_us(1);SCL_H();delay_us(1);while (SDA_READ()) {timeout++;if (timeout > 250) {I2C_Stop();return false;}}SCL_L();return true;
}// 发送一个字节
void I2C_SendByte(uint8_t data) {SDA_OUT();SCL_L();for (uint8_t i = 0; i < 8; i++) {if ((data & 0x80) >> 7) {SDA_H();} else {SDA_L();}data <<= 1;delay_us(2);SCL_L();delay_us(2);}
}