智慧码垛系统介绍
前言
智慧码垛系统是一款集智能化、灵活性与高效性于一体的工业自动化解决方案。系统可根据用户输入的产品规格、垛盘尺寸等关键参数,智能生成码垛编组,并支持用户自定义垛层布局以满足个性化需求。内置优化算法,可实现精准的码垛路径规划,适配多夹爪操作场景,大幅提升作业效率。
系统还集成了仿真工具,能够进行机器人运动范围和可达性验证,确保方案在实际应用中的可靠性与安全性。同时码垛编组方案可以一键导入PLC,通过内置的PLC库和码垛模板,可以帮助用户快速对接机器人、传送带等设备并控制,完成码垛项目。智慧码垛系统为用户提供灵活高效的操作体验,是现代工业生产自动化的不二选择。
下载地址:github
一、系统介绍
智慧码垛系统包含如下功能模块:
- 垛形编组:用于配置码垛参数,生成垛形数据
- 路径规划:规划码放过程的路径点
- 垛层布局:手动编组,自定义布局方案
- 多夹爪:设置多夹爪适配一次多抓场景
- 码垛控制:配置预示教点(如来料抓取点),验证机器人是否可达放置点
视频介绍
目标用例
在众多行业中,将产品按特定模式整齐堆叠是一种常见过程。由于产品和容器尺寸变化或客户对托盘包装布局的具体要求,码放过程可能高度多样化,因此需要付出大量时间。智慧码垛系统则能大大提升该过程效率,帮助用户摆脱计算、编程、调试等困扰。
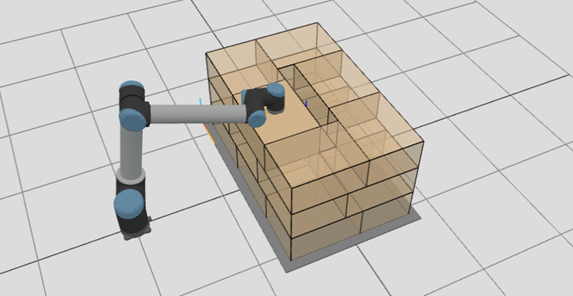
上图显示了一个典型的码垛工作场景,托盘上共有3层,每层6个包装箱。在智慧码垛系统中,用户可以配置产品和垛盘的尺寸,设置垛形的模式,检查和调整生成的结果,生成的点位可以作为控制码垛程序的目标位置。
同时,智慧码垛系统还提供了用于西门子SIMATIC PLC的指令库,系统生成的位置在同步到PLC后,用户能够调用库指令读取点位,并基于库中提供的模板程序快速的完成码垛项目。(目前已在S7-1215,S7-1511中完成了测试)
 |  |  |
二、功能模块
1.垛形编组
在垛形编组模块中,用户能够创建新的垛形配置,通过编辑垛盘、被码物品、中间层、垛形模式参数,以获得目标垛形编组。
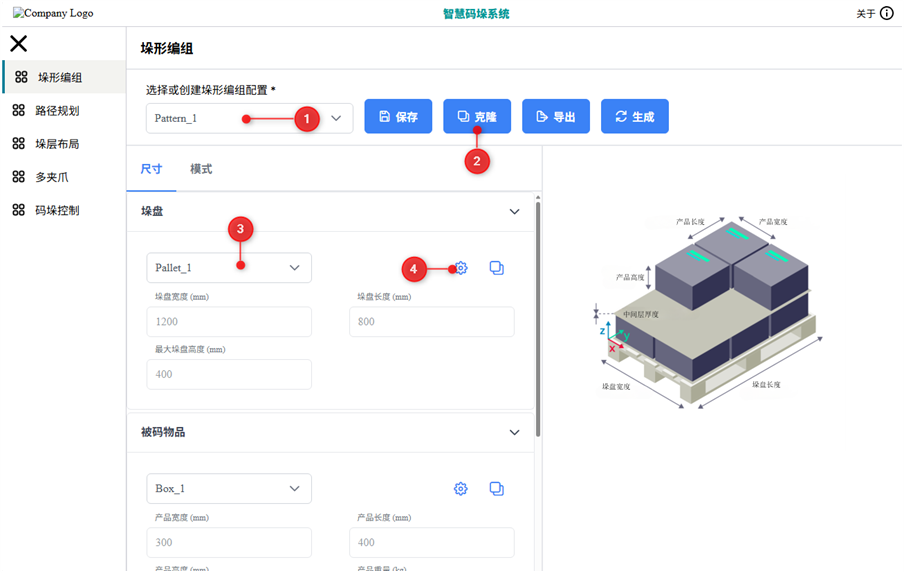
- 在选垛形型下拉框中载入默认配置“Pattern_1”
- 基于“Pattern1”,克隆产生新的垛形配置(在新垛形配置中修改尺寸和模式,如需创建新的垛盘或被码物参数,可以先克隆后修改,并保存到当前垛形配置)
- 在垛盘选择下拉框中选择垛盘配置,或基于默认配置克隆新的垛盘配置
- 由于每一个垛形配置都包含垛盘、被码物体、中间层和模式相关的参数,用户需要先基于默认模板进行克隆,然后修改以得到新的配置
- 完成配置后点击“生成”可以查看当前垛层布局和分布

| 参数名 | 参数含义 |
|---|---|
| 名称 | 垛盘尺寸配置的名称,需唯一命名 |
| 宽度 | 垛盘坐标系X轴方向尺寸 |
| 长度 | 垛盘坐标系Y轴方向尺寸 |
| 最大垛盘高度 | 产品在垛盘上的最大堆叠高度,决定最多能码多少层 |
| 最大产品数量 | 垛盘上产品最大数量,<=0则不检查该设置 |
| 最大产品总重量 | 垛盘上能码放的产品总质量,<=0则不检查该设置 |
2.路径规划
采用机器人码垛时,机器人接近将要码放位置和从码放位置撤回的路径,可以通过该模块进行设置,添加过渡点以优化路径。
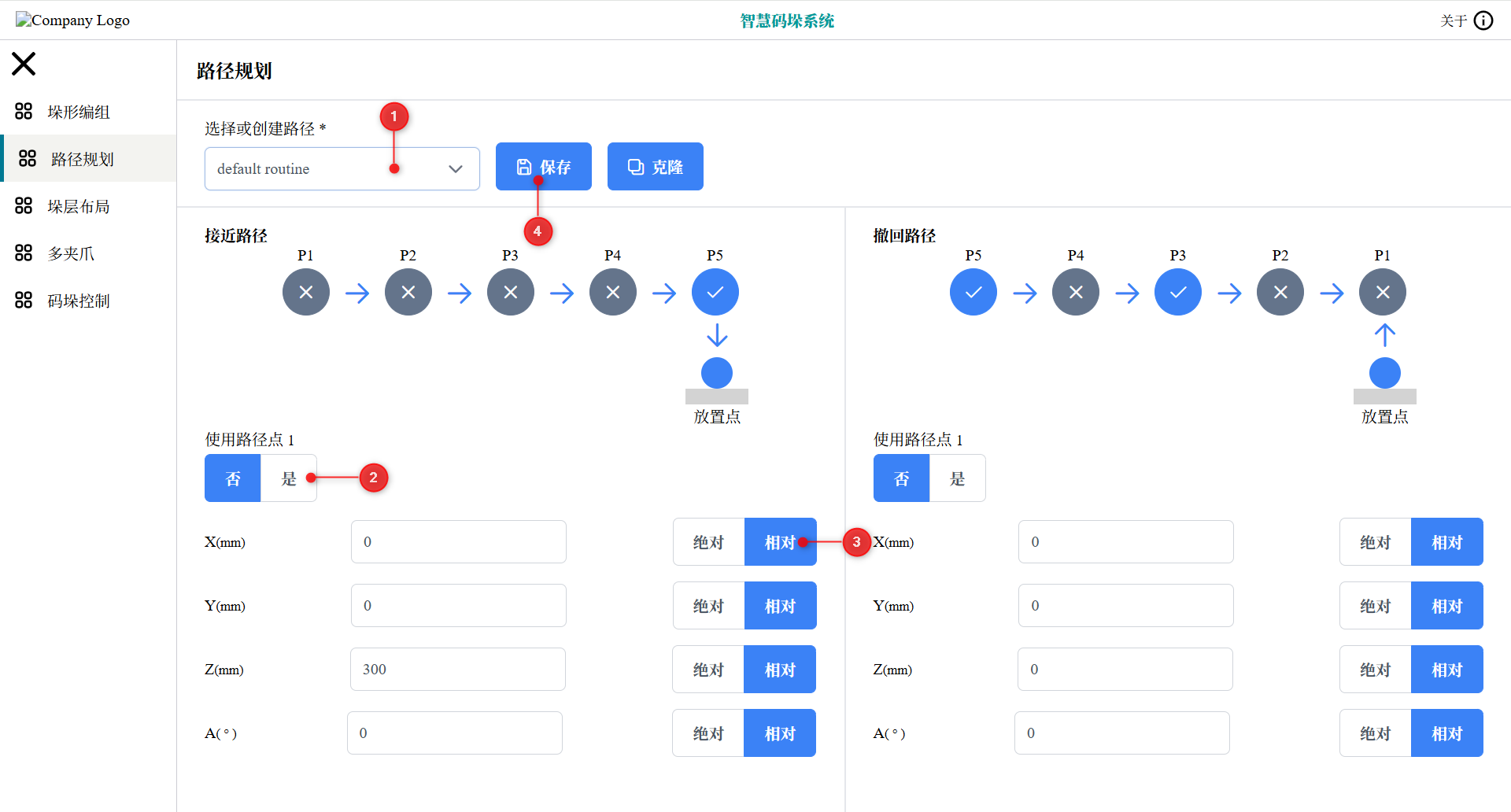
- 首先选择需要配置的路径,或基于路径模板克隆以创建新的路径配置。
- 选中路径中的点(P1 ~ P5)配置是否在码垛中使用该路径点。
- 配置路径点为绝对或相对位置点。绝对路径点以托盘坐标系为参考,为绝对坐标位置;相对路径点以放置点为参考,为相对坐标位置。
- 可以为每个被码放的物品和中间层分别设置路径,在“垛层布局”模块进行编辑。
3.垛层布局
在“垛形编组”中基于配置生成的垛形可以在该模块进行自定义修改,创建用户定制方案。

- 首先选择垛形编组配置,并新增用户布局方案。
- 新增的布局方案采用默认配置,用户通过点击页面右侧的表格数据(如标记4),对参数进行修改。修改的参数会作用到相关的垛层。
- 在页面左侧上方的图形中会显示出当前垛形的垛层布局和分布,如上图:当前垛形共7层,第一层(底层)为奇数层(指所使用的布局模板),最后一层为顶层(布局模板),中间层为IL1(布局模板)。
- 在布局模板(如奇数层,IL1)中修改的参数会作用到使用该布局模板的每一层。
- 完成自定义布局方案,通过“同步PLC”按钮可以将配置下载到PLC数据块中。
4.多夹爪
该模块用于为一次多抓的使用场景计算码垛路径。
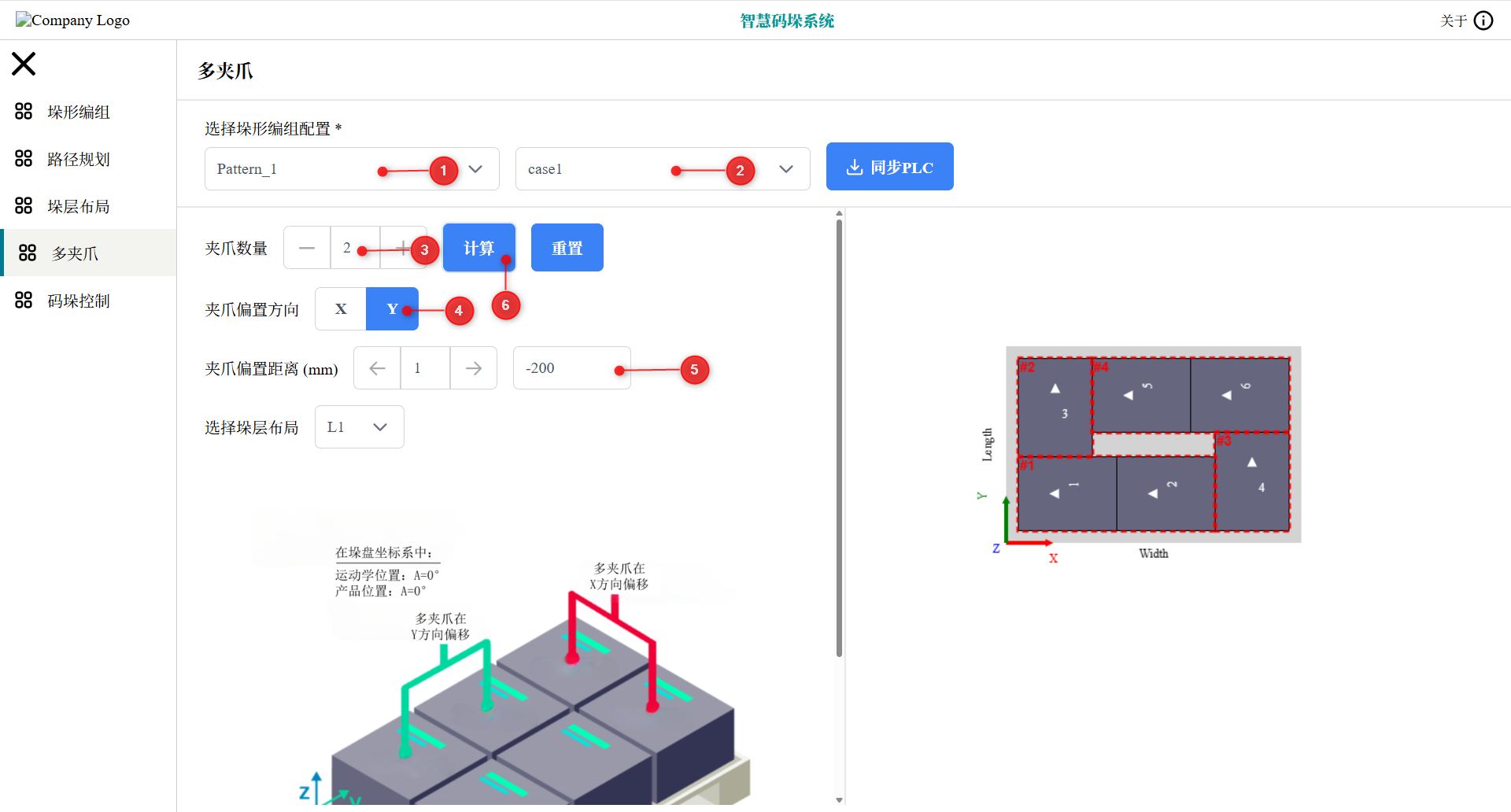
- 首先选择已配置好的编组配置和用户方案。
- 配置多夹爪的数量、偏置方向和偏置量。偏置方向根据来料确定,偏置量是以机器人末端法兰中心为参考的投影距离。
- 点击“计算”验证当前配置是否可行。
- 完成多夹爪,通过“同步PLC”按钮可以将垛形配置和夹爪配置都下载到PLC数据块中。
5.码垛控制
当前提供两种功能:
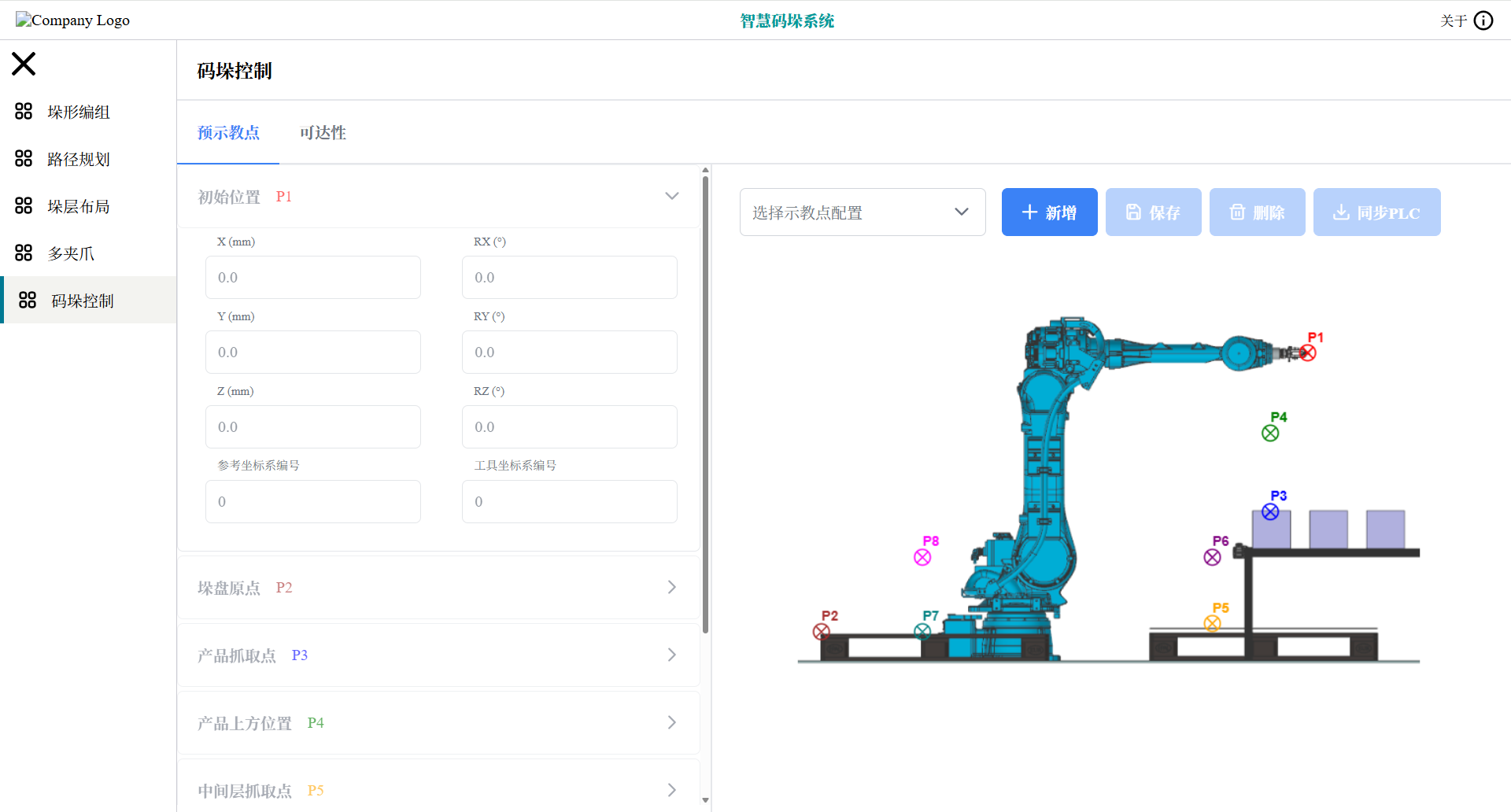
功能一:用于配置需预示教的静态位置数据,包括初始位置(Home)、垛盘原点、来料抓取点、来料抓取点上方、中间层抓取点、中间层抓取点上方,等。
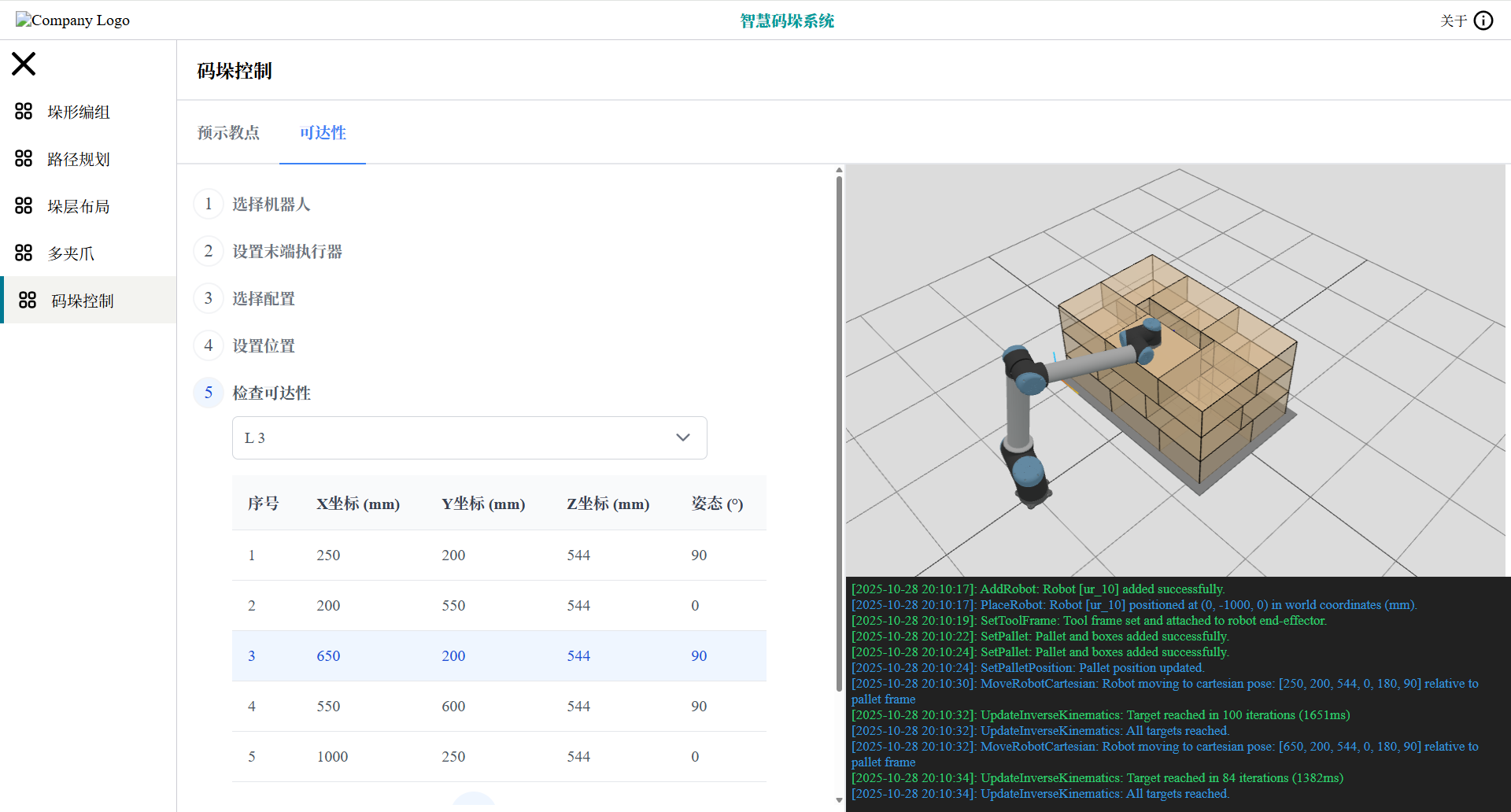
功能二:用于对机器人、托盘、末端工具和垛形配置进行验证,评估机器人是否可达目标码放位置。
三、部署方案
系统为Web端工具,可跨平台,支持IIS、Docker等部署方式。
目前提供了以SIMATIC PLC为主控制器的方案搭建码垛工作站。Web端完成垛形配置后,通过“同步PLC”按钮可以将数据通过OPC或WebServer API导入到PLC中。基于提供的TIA Portal库,用户只需简单配置即可完成码垛控制程序。(机器人通信和编程目前不提供模板)
- 在TIA Portal中新建一个工程(码垛控制库目前为V19版本),并导入该库。
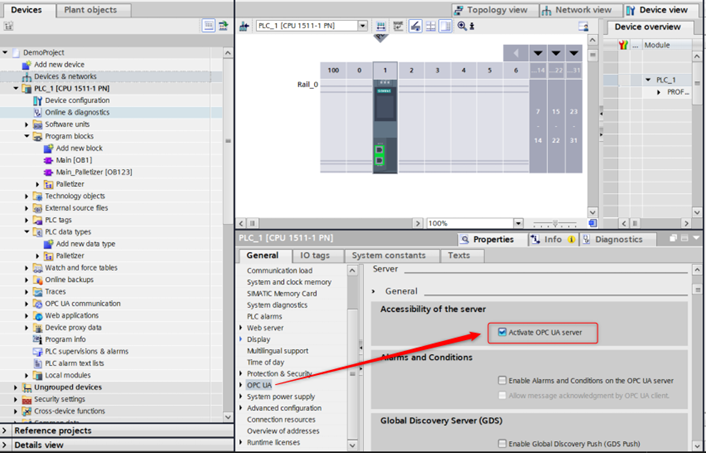
- 启用PLC的OPC UA服务器功能。
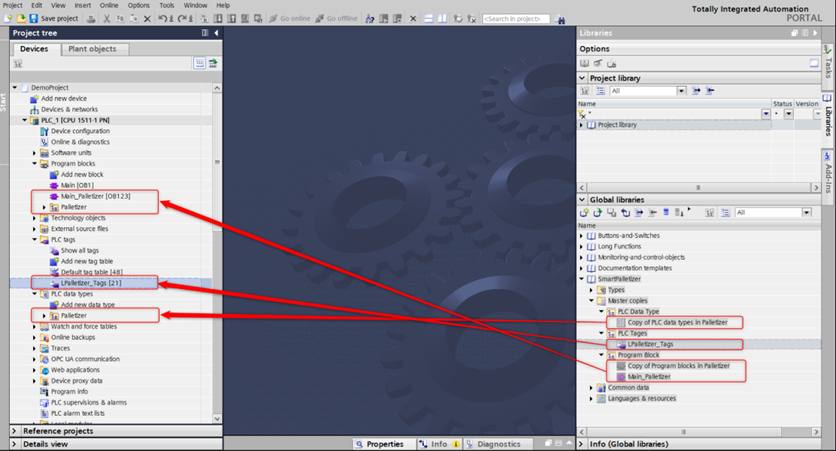
- 将导入的码垛控制库内容复制到当前的项目(拖拽到对应的文件夹)。
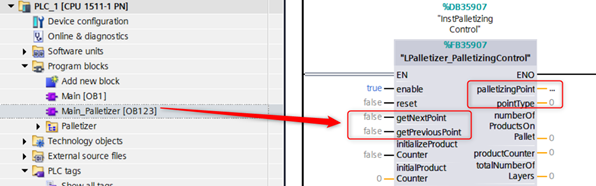
- 编译工程,并修改“LPalletizer_PalletizingControl”功能块的输入,链接到用户的控制位,通过置位“getNextPoint”得到目标位置和位置点类型。
总结
本文简单介绍了智慧码垛系统当前的功能和使用方式,更多功能持续开发中,敬请期待…
如有疑问,欢迎留言或来信交流:hbin6358@163.com