云台和雷达标定方法
云台和雷达标定
最近在项目上遇到了雷达和云台的标定,即:
雷达安装在云台上,你不知道雷达光芯到云台轴心坐标的变换矩阵。
这时候,可以通过标定的方法,通过多组方程计算出这个变换矩阵。

几点感悟
-
1-你得建立统一的标准
这一点很重要,后面会讲到,你云台的制造标准可能和机器人相关标准不同,如果你没有建立统一的标准,那么,包出错的,搞标定就是搞矩阵,矩阵中A@B和B@A是完全不一样的。这里的标准,包括坐标系的的统一,旋转方向与正负的统一,以及其他的一些标准的统一。 -
2-坐标系很重要
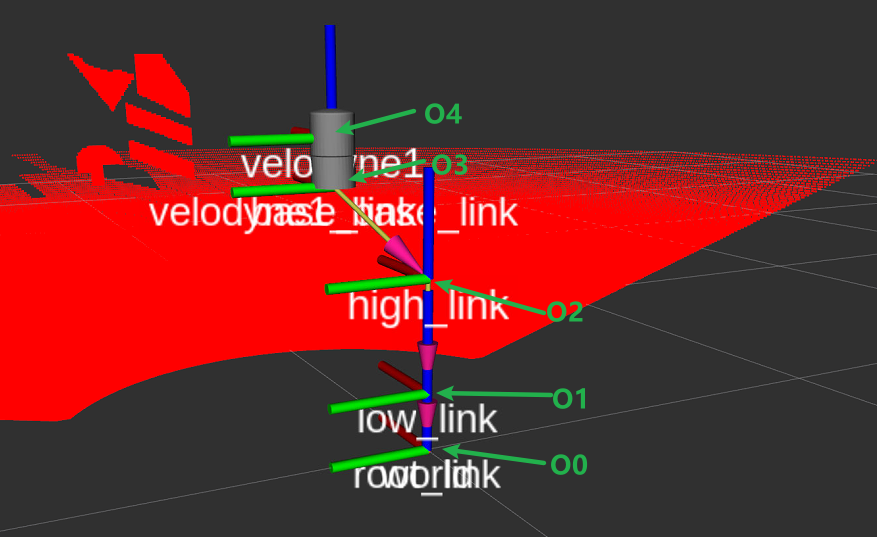
坐标系的建立,关系着二轴云台的水平俯仰轴,关系着计算RPY的3*3的矩阵,比如我这里,我在观察云台的solidworks结构的时候,发现,它朝前是z,朝上是y,朝左是x。但是我使用的是朝前是x,朝左是y,朝上是z。这时候,你需要做的是,选定一个标准,比如我用的是朝前是x,朝左是y,朝上是z,那我写代码的时候,全程按照这个标准来计算,这时候,如果我水平旋转,就是绕着z轴旋转,如果我俯仰旋转,就是绕着y轴旋转。如果你选择朝前是z,朝上是y,朝左是x,那么水平旋转的时候,那么就是绕着y轴旋转,俯仰旋转的时候,就是绕着x轴旋转。此时,你使用的旋转矩阵就是不一样的。 -
3-对RPY以及转动正负需要了解
这种图讲解的就很好,很直观,以前我都懒得记这个,现在,根本不用看,我就知道RPY对应的是滚转,俯仰,水平转动,因为最近用的实在是太多了。
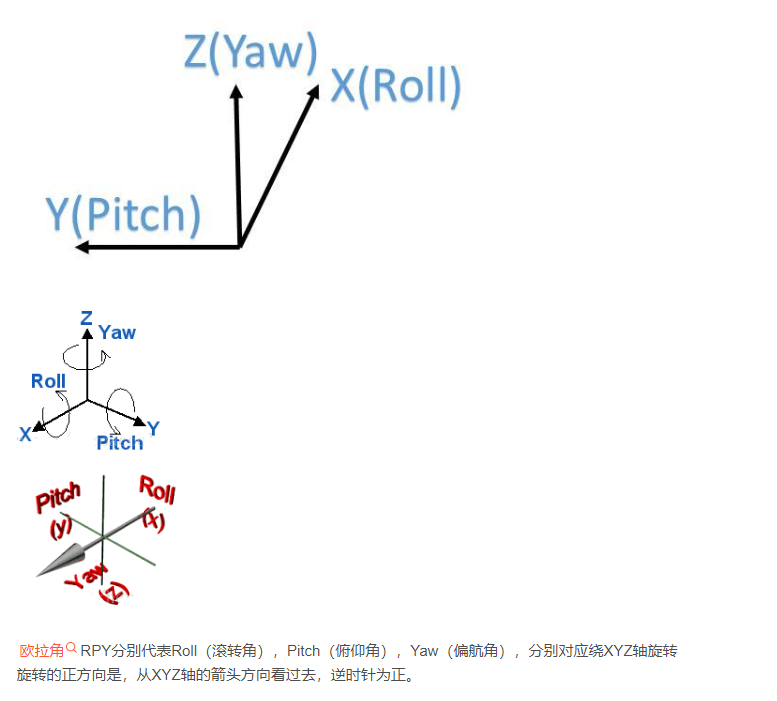
RPY对应着滚转,俯仰,水平。在我这个项目中,这个厂家做的云台,和机器人相关的标准不太一样,以
朝前是x,朝左是y,朝上是z作为坐标系,如果是水平向左转的话,RPY中Y应该是正的,但是现实的云台中,其向左转是负的,向上转动的话,RPY中P应该是负的,但是云台中向上转动就是正的。此时,你需要取负才对,才能符合你建立的坐标系。在讲详细些,云台是会提供上位机的,其上位机中调整云台上下左右的正负,和机器人中的RPY对应的正负是反过来的,由于我是按照机器人建立的坐标系,相应的就要取负过来,否则,就会导致算错。
-
4-矩阵乘法不能反,矩阵链式不能断
这一点也是深刻的体会,目前AI很发达,这部分矩阵链式的代码,最初是AI给我写的,导致最后一直有问题,排除很多错误后,我最后把问题定位在矩阵乘法这里。
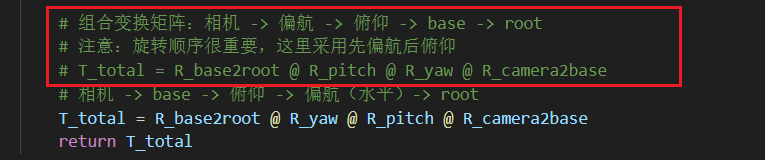
才发现,AI给我的矩阵写反了,我后面改正后,才对了。因此这种链式相乘的矩阵,你千万不可给他乘反,尤其他还不是单位矩阵。
当时我们采集了单轴旋转的数据,放到这里来测试,结果是没问题的,但是双轴旋转的数据进行测试,立马就不行了,当时也是没有考虑到这个矩阵乘法,一直想着,我需求和AI说清楚了,代码应该就没啥问题了,而且单轴测试过了,是对的。
结果就是,单轴旋转的话,其中有个矩阵是单位矩阵,不管乘在左边还是右边,都不影响计算。双轴的话,问题就大了。
-
5-别被表象迷惑
有些时候,你yaw和pitch的矩阵乘反了,然后你得到的相机到俯仰轴之间的变换矩阵,测试数据的时候,发现数据大致拟合出来,觉得感觉应该是对的,但是我要告诉你的是,这种情况,它可能也是你的yaw和pitch的矩阵乘反了,因为这个矩阵是你通过现有数据拟合出来的,会贴近这些数据,你可以没有用来拟合的数据进行测试一下,如果数据偏差很大,那可能你的矩阵这边,还是存在问题。 -
6-你需要有抽象建模的能力
现实的模型是复杂的,你需要给他抽象出来,也就是你的空间能力需要不错的,然后如果可以的话,借助仿真的工具,比如ROS中的Gazebo,Mujoco这类仿真引擎(不知道引擎这个词对不对),给他设置一个真值,通过你的算法进行验证。 -
7-说说理想情况
在理想的情况,也就是上图中O0O1O2坐标系是在一条线上的,而且是相互不相交的,然后O3也就是雷达的底座,随便找个位置放,然后O4也就是雷达的光芯,其实也无所谓在哪。只需要O4和O2之间是固定的,此时,如果你采集数据进行计算,在这种情况下,无论你是单轴采集的数据,还是双轴采集的数据,只需要8组(我没有试过比这还少的情况)数据,你就能够算出这个旋转变换矩阵,无论是单轴动还是双轴动,这个我在仿真中进行了实验。 -
8-搞清楚矩阵的变量是多少个
3D 空间的刚体变换场景下,虽然这个变换矩阵是4*4大小的,但是变换矩阵对应的独立参数确实是 6 个 ——3 个旋转参数(描述姿态)和 3 个平移参数(描述位置),也就是Rx,Ry,Rz和tx,ty,tz。[ R | t ] 其中 R是3x3旋转矩阵(有3个独立参数),t是3x1平移向量(3个独立参数) [ 0 0 0 | 1 ] 最后一行是固定的[0,0,0,1],无独立参数 -
9-当你相信你的配准精度后,如果标定结果不够理想,合理怀疑厂家设备问题
当你排除很多问题后,最后效果还是不够理想,你该怀疑厂家的设备了,下面这种标定方法的标定,只能适用于水平旋转轴和垂直旋转轴是 -
10-设备结构不同,遇到的问题就有可能不同,不要一上来就使用别人的代码
别人的代码,适用于别人的结构,不一定适用于你项目的结构,而且,人家的代码,你不清楚人家考虑到哪种程度。
比如我这的云台,靠近底座的是控制水平旋转的,靠近相机的是控制俯仰的,万一别人的结构是类似机械臂的结构,靠近底座的是控制俯仰的,靠近相机的是控制水平旋转的,那么,代码就需要更改了。而且,你也不清楚,人家的转动角度,我最开始遇到的问题,就是上面第三点情况,直到我完整统一了坐标系,RPY,RPY旋转的正负都为机器人坐标系,把云台设计的标准,转到机器人上来,这时候,很多东西虽然是反正的,但是知道要怎么写了。 -
11-多试
矩阵这个东西,如果你理论并不是很好,就需要多试试,相当于穷举法。
标定方法介绍
我们这款3D相机,它能够采集图像和点云,但是图像的分辨率很差,只有640*640,我们觉得用图像进行标定,几乎是不太行的,不知道有没有做过这方面的,点评一下这个分辨率下是否可以做。
但是这个相机采集的点云,在4米以内,质量还是不错的,因此我们采用的是点云进行标定。
这里我们采用的是0.5*0.5米的标识板,上面带有不同图案,使得后续配准结果唯一。然后标识板放在离相机2米远的位置。相机放置在云台上,这个云台的精度为0.01度。
数据采集
首先就是云台通过水平/俯仰转动,带动相机,采集多组数据,记录下每次水平/俯仰转动的大小。
对采集的数据进行数据分割,只剩下标识板部分。
点云配准
将采集到的数据和标识版标准点云进行配准,然后在标准版标识点云中,选择一个点,计算这个点,在配准过去后的点的三维坐标,这里其实就是算的是目标点P在当前设备坐标系下的坐标。这个配准,理论上来说,数据只要够好,配准就没啥问题。
然后把这些配准过去得到的点也记录下来。
计算
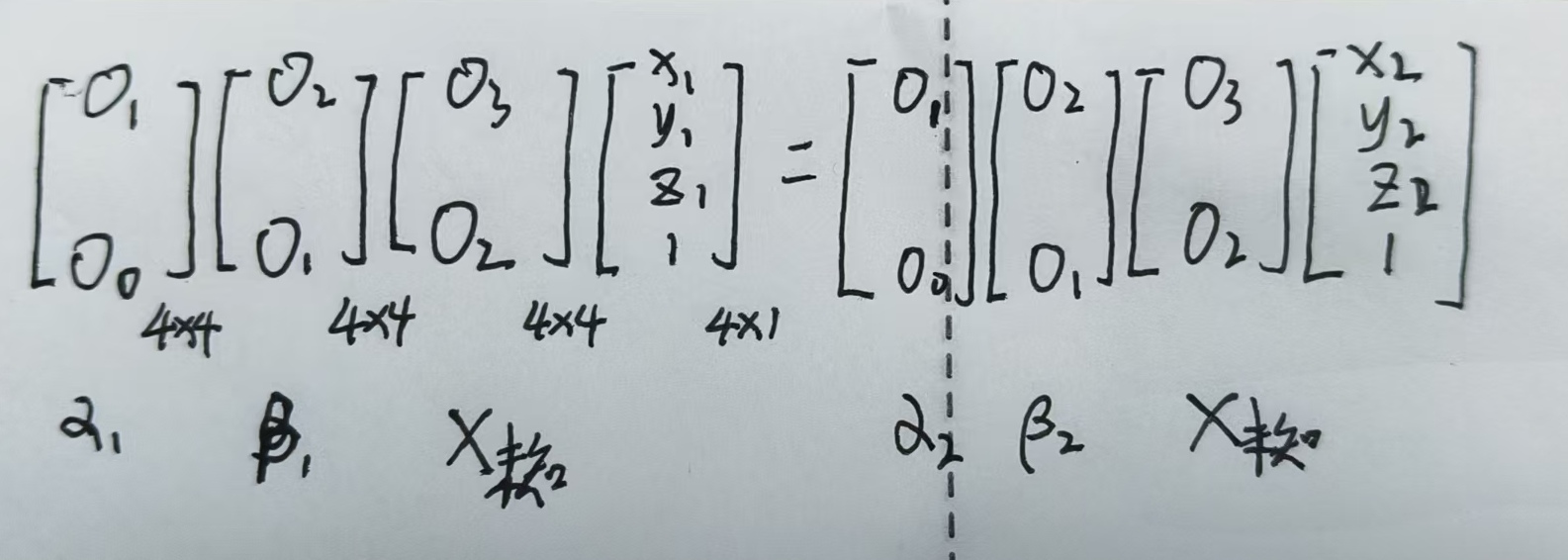
在1号位置下,记录的水平角度α1和俯仰角度β1,在1号位置下,配准得到的那个点p1。
在2号位置下,记录的水平角度α2和俯仰角度β2,在2号位置下,配准得到的那个点p2。
另X为O3到O2的固定的旋转变换矩阵,就可以列出下面的等式。
O1到O0的,只会受到α的影响,O2到O1的,只会受到β的影响。
α和β每次转动的时候,你也是都知道的,也就是说,左边的两个矩阵,你都能计算出来,记为A,那么现在就是相当于求解:
A1@X@P1=A2@X@P2A_1@X@P_1 = A_2@X@P_2A1@X@P1=A2@X@P2
其中,@代表的就是矩阵乘法(我只知道python中是这样的)
通过联立多个方程组,就能把X求解出来。
算出来后,你把这里的P换成点云中的每个点,就能换到初始姿态下的点云了,实现了多个姿态下的点云,合并到一个坐标系中了。
当然,这只是原理,代码的话,可以拆分成以下三步。
├── 1计算o2到o0的旋转变换矩阵.py
├── 2计算相机到base的矩阵.py
├── 3批量验算水平俯仰.py
后续也会将代码放在GitHub上。
遇到的问题
做到这里的话,我们觉得自己的配准,没啥大问题,然后就陷入了沉思,因为仿真中的数据,用我们的标定算法,所有视角下的标识板点云,都是重合在一起的,角度误差为0°,可能很少有个别是0.01°,而且仿真中,我能够得到真值,也就是雷达光芯到O2的旋转变换矩阵,当使用8组水平旋转的数据,拟合出来的旋转变换矩阵,和真值差别很小很小。但是现实效果,就是标识板平面之间存在0.1°到1°的随机性角度误差,这不符合我们的精度要求。
然后我们就开始进行O2到O0之间的矩阵拆解,过程也挺痛苦的。
最后我试验出,如果只是把O1的坐标系摆歪,而不去改变O2和O1的轴同向且平行关系,上面的标定方法中的A1@X@P1=A2@X@P2A_1@X@P_1 = A_2@X@P_2A1@X@P1=A2@X@P2 是不会影响的,因为这个是乘在A矩阵左边的,不会参与到上面的标定过程中。
当你把O2坐标系摆歪后,然后再用这种方法去计算,仿真的数据,就像实际的数据一样,开始存在平面与平面之间的角度误差和位移偏差了。
也就是说,O2和O1的坐标系,一旦不是同向且平行的,他们之间,就存在一个旋转变换矩阵,需要先将O2摆正才行。
此时就是A矩阵中间,需要添加一个未知矩阵,相当于整个方程组需要算两个未知矩阵,这个在仿真中,经过计算,通过采集一些数据,验证了这个思路的正确性。
但是到现实中,又出问题了,效果还是不佳。
未完。。。。
最后
-
云台和雷达继续标定,网上很少搜到好用的教程,更多的就是手眼标定那一套,甚至有些就是人直接用手抬着标识板,不可避免标识板发生移动,导致结果肯定会不精准。
-
我们这个的精度,需要是标识板的平面夹角小于0.1度,所以很难呀。
-
上面的很多结论,是从仿真中经过验算得到的,出问题的可能性还是比较小的,但是不排除出错的可能性,笔者水平也有限,见谅。
-
我在GitHub上搭建了类似云台的水平旋转和俯仰旋转的机械结构的ROS的Gazebo仿真,可以帮助你验证很多很多情况,我靠这个,已经得出了很多结论。
https://github.com/Knighthood2001/gimbal_structure_simulation
上面这个是我主要使用的, 它搭载了仿真雷达, 可以用来采集仿真数据。
https://github.com/Knighthood2001/u_shaped_gimbal
上面这个,我目前只是仿真了这个云台,以及控制这个云台进行运动,但是,目前还没有搭载仿真雷达,后续应该会完善。 -
这两个GitHub链接的话,上面这个,由于只是结构仿真,自由度高,你能够仿真出两个轴不平行的情况,来验证一些设备上的误差导致算法的结果产生偏移。