医疗连续体机器人模块化控制界面设计(2025年更新版Python库)
一、什么是医疗连续体机器人(更新版)
连续体机器人(如蛇形、管状、柔性臂)依赖柔性本体与高冗余自由度,能在狭窄、弯曲环境中安全操作,适用于内窥与微创外科等场景。工程上常用分段常曲率或Cosserat杆模型做运动学/动力学建模,并结合视觉/力反馈做闭环控制;在临床合规上需满足 IEC/ISO/FDA 等标准(见下)。
参考:ROS 2 最新稳定分支 Jazzy Jalisco(2024)适合医疗机器人中间件;其 Python 绑定 rclpy 用于节点化控制与 DDS 通信。(docs.ros.org)
二、控制界面设计目标(2025 版)
设计原则(增强)
- 模块化/可插拔:UI、运动/力控、视觉、通信、日志、回放、仿真解耦;以ROS 2 节点与插件式驱动隔离具体硬件/协议。(docs.ros.org)
- 可扩展:支持不同连续体机构(拉索/气动/磁致动等)与不同主站(串口、EtherCAT、gRPC、DDS)。EtherCAT 可用 PySOEM 做主站侧测试/调试。(pysoem.readthedocs.io)
- 可视化与可操作性:面向医生的“少选项/高清晰度”UI;面向工程师的“调参/日志”模式。UI 建议迁移到 PySide6(Qt for Python) 或 Dear PyGui(GPU 即时模式,轻量且适合实时曲线/状态面板)。(doc.qt.io)
- 实时与安全:UI 主线程与控制回路隔离;关键通道走 ROS 2 QoS(可靠/实时);加入急停链路/看门狗/阈值限幅;网络侧遵循最新医疗器械网络安全指南(见合规章节)。(U.S. Food and Drug Administration)
三、2025 年推荐 Python/工具链
| 能力 | 推荐栈(2025) | 用途/理由 |
|---|---|---|
| 桌面 UI | PySide6(Qt for Python),或 dearpygui | Qt 官方绑定、长期维护;或用 Dear PyGui 做高刷监控/图谱。(doc.qt.io) |
| 中间件 | ROS 2 Jazzy + rclpy | 节点化、DDS 通信、QoS、参数/日志/话题/服务/动作;医疗场景可控可测。(docs.ros.org) |
| 数值/优化 | numpy, scipy, casadi(最优/非线性约束 IK/OC) | DLS/Jacobian/最优控制与约束求解,可导可生成代码。(CasADi) |
| 机器人学 | robotics-toolbox-python(几何/雅可比/轨迹) | 快速搭建与验证运动学/可视化/轨迹。(Spatial Math Toolbox for MATLAB) |
| 通信/现场总线 | pyserial, pyzmq/grpc, pysoem(EtherCAT) | 与下位机/驱动器/主站通信;EtherCAT 调试。(pysoem.readthedocs.io) |
| 成像/医疗影像 | opencv-python, SimpleITK, pydicom, MONAI | 导航、术中影像融合、读取 DICOM、医学深度学习。(SimpleITK) |
| 3D 可视化 | pyvista/vtk, open3d | 机构/场景/点云渲染、配准与距离测度。(Open3D) |
| 仿真/验证 | SOFA(+SofaPython3/SoftRobots)、PyElastica(Cosserat)、AMBF、ORBIT-Surgical(Isaac Sim) | 快速构建软体/连续体仿真、手术基准任务与 sim-to-real。(SOFA) |
注:SOFA/SoftRobots 提供软体直/逆 FEM 求解器;ORBIT-Surgical 含 dVRK/STAR 任务基准,支持策略学习与 sim-to-real。(SOFA)
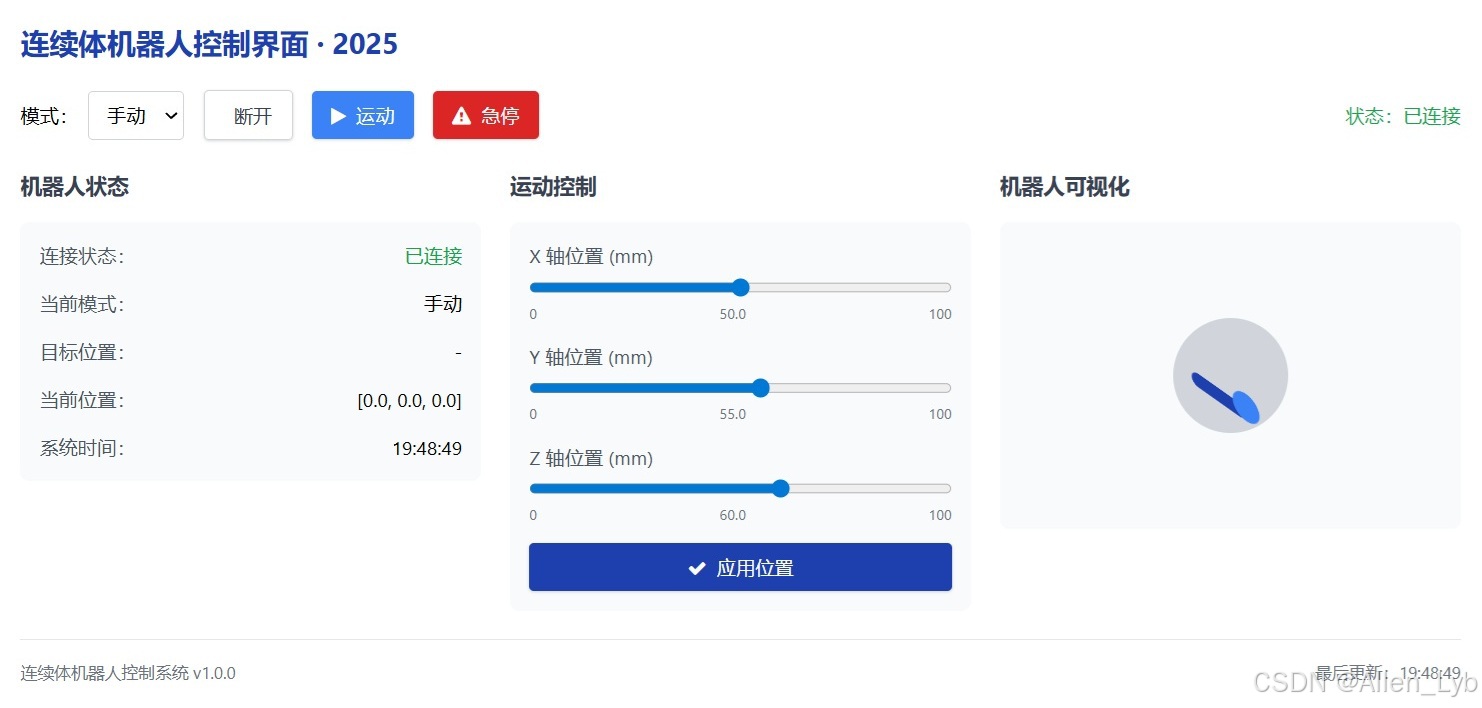
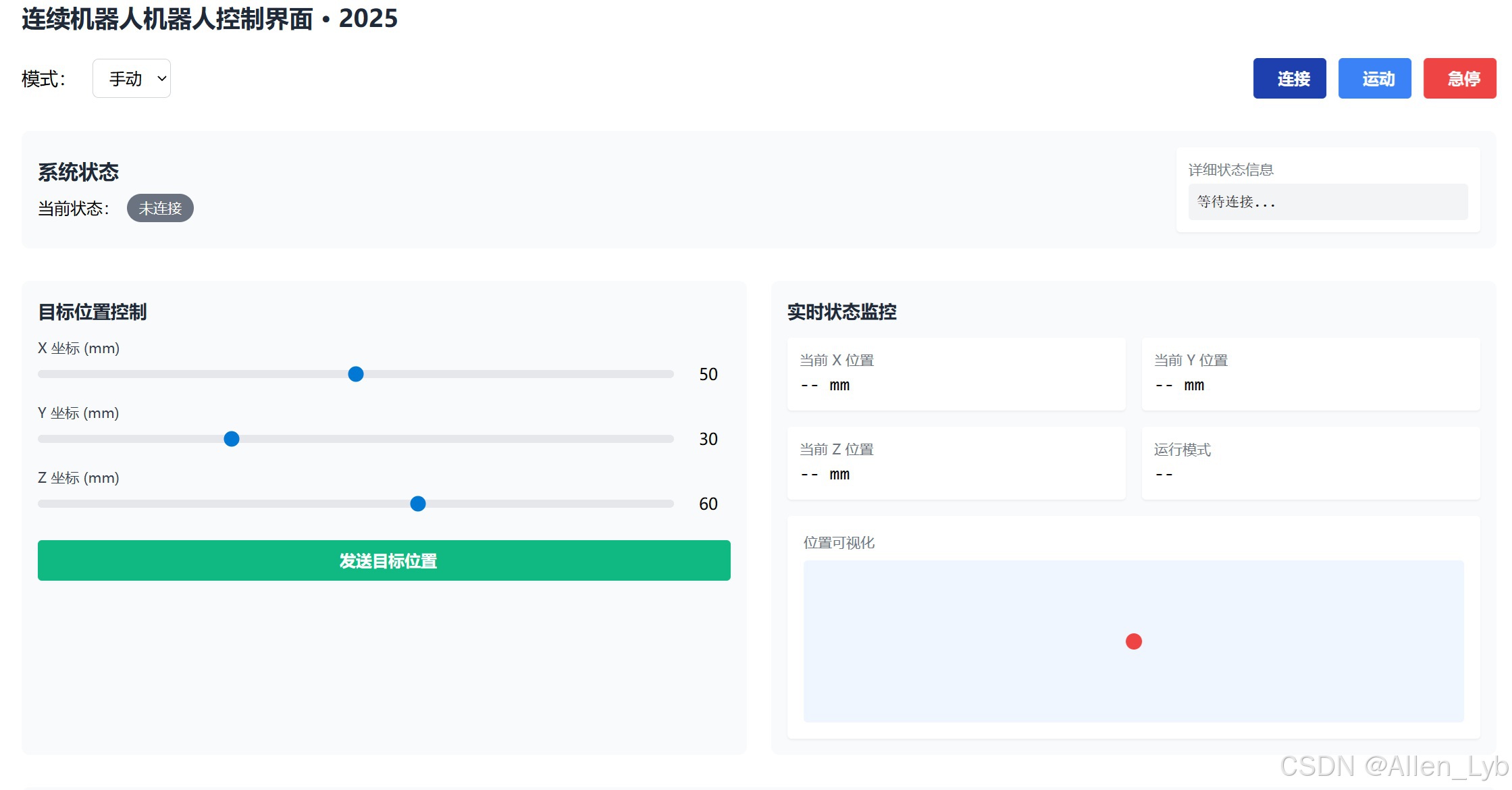
四、界面与系统架构(升级)
├── Frontend UI(PySide6 / DearPyGui)
│ ├── 手动/自动/示教/回放 模式
│ ├── 急停/许可/医生确认流
│ ├── 实时状态:力/位置/压力/温度/报警
│ └── 影像与三维视图(OpenCV + VTK/PyVista)
│
├── ROS 2 控制层(rclpy)
│ ├── motion_server(逆/正运动学、轨迹生成、限幅)
│ ├── force_control(阻抗/混合控制,可选 casadi MPC)
│ ├── io_bridge(串口/EtherCAT/gRPC 驱动插件)
│ ├── vision_node(相机/定位/配准/内窥增强)
│ └── safety_node(阈值、看门狗、急停、心跳)
│
├── 驱动与协议
│ ├── 串口(pyserial)
│ ├── EtherCAT(pysoem)
│ └── 自研控制器(gRPC/ZeroMQ)
│
└── 仿真验证├── SOFA/SoftRobots 场景回放├── AMBF/ORBIT-Surgical 手术任务└── PyElastica 连续体段建模/对齐标定
(采用 ROS 2 节点化解耦与 QoS 配置,便于临床环境下低延迟/高可靠的发布订阅与远程日志/回放。)(docs.ros.org)
五、合规与安全清单(面向医疗上机)
- 软件生命周期:IEC 62304 要求软件分级、风险控制、追踪矩阵与变更管理。(国际标准化组织)
- 风险管理:ISO 14971 风险分析(HAZARD→HARM)、RPN、残余风险评估与可用性耦合。(国际标准化组织)
- 手术/内窥特定:IEC 80601-2-77(机器人辅助手术设备基本安全/性能)。(国际标准化组织)
- 网络安全(最新):FDA 2023 最终版网络安全指南已实施;2025 年 FDA 又更新了网络安全预提交指南要点(更强调安全控制与证据)。UI/中间件需落实威胁建模、SBOM、补丁策略、漏洞响应与日志。(U.S. Food and Drug Administration)
六、项目目录(2025 版)
project/
├── app/ # 前端 UI
│ ├── main_qt.py # PySide6 主窗口(或 main_dpg.py)
│ └── widgets/
├── ros2_ws/src/
│ ├── motion_server/ # IK/轨迹服务(rclpy + casadi 可选)
│ ├── force_control/ # 阻抗/混合控制
│ ├── io_bridge/ # 串口/EtherCAT/gRPC 插件
│ ├── vision_node/ # OpenCV/SimpleITK/MONAI
│ ├── safety_node/ # 急停/阈值/心跳
│ └── msgs_srvs/ # 自定义 msg/srv/action
├── sim/ # SOFA / AMBF / ORBIT-Surgical 场景
└── tools/ # 录包/回放/标定脚本
七、依赖安装(示例)
# UI
pip install PySide6 dearpygui# ROS 2 Python(建议使用系统发行版安装 ROS 2 Jazzy,再用 pip 安装 rclpy 扩展包)
# 参考 ROS 2 官方文档安装后:
# sudo apt install ros-jazzy