《基本函数的统一算法》
《基本函数的统一算法》
概要
本文描述了一种统一的算法,用于在数字计算机上生成三角函数、双曲函数、指数函数、对数函数等基本函数及其反函数。此外,该算法还能执行乘法、除法以及二进制/十进制、十进制/二进制转换。该算法是坐标旋转数字计算机(CORDIC)计算技术的扩展,其特点是采用固定的程序、循环迭代,并且只使用**移位、加法、减法、表查找和位计数**等基本操作。该算法的规整性使其特别适合在只读存储器(ROM)或可编程逻辑阵列(PLA)中实现。
---
简介
在数字计算机发展的早期,计算基本函数的方法通常依赖于多项式或有理分式逼近。这些方法需要乘法运算,而在早期计算机中,乘法器的硬件实现成本高昂或速度较慢。坐标旋转数字计算机(CORDIC)算法,由 Jack Volder [1] 首次提出,提供了一种替代方案。它通过一系列由移位和加法构成的微旋转来逼近目标角度,从而避免了显式的乘法运算。
Volder 的工作主要集中于三角计算。本文旨在展示如何将 CORDIC 技术**统一和扩展**,使其能够在**圆周、线性、双曲**三种坐标系下运行,并通过同一套硬件架构计算出一大批基本函数。表 I 总结了该统一算法在不同模式和坐标系下所能实现的核心功能。
表 I:统一算法功能摘要**
| 坐标系 | 模式 | 初始值 | 结果 |
|---|---|---|---|
| 圆周 (m=1) | 旋转 | x0=K,y0=0,z0=θx0=K,y0=0,z0=θ | xn=cosθ,yn=sinθ,zn=0xn=cosθ,yn=sinθ,zn=0 |
| 向量化 | x0=X,y0=Y,z0=0x0=X,y0=Y,z0=0 | xn=X2+Y2,yn=0,zn=tan−1(Y/X)xn=X2+Y2,yn=0,zn=tan−1(Y/X) | |
| 线性 (m=0) | 旋转 | x0=x,y0=0,z0=yx0=x,y0=0,z0=y | xn=x,yn=0,zn=0xn=x,yn=0,zn=0 (在此过程中,乘积 x⋅yx⋅y 被累积在 yy 寄存器中) |
| 向量化 | x0=x,y0=y,z0=0x0=x,y0=y,z0=0 | xn=x,yn=0,zn=y/xxn=x,yn=0,zn=y/x | |
| 双曲 (m=-1) | 旋转 | x0=K′,y0=0,z0=θx0=K′,y0=0,z0=θ | xn=coshθ,yn=sinhθ,zn=0xn=coshθ,yn=sinhθ,zn=0 |
| 向量化 | x0=X,y0=Y,z0=0x0=X,y0=Y,z0=0 | xn=X2−Y2,yn=0,zn=tanh−1(Y/X)xn=X2−Y2,yn=0,zn=tanh−1(Y/X) |
*注:K 和 K' 分别为圆周和双曲系统的比例因子常数。*
坐标系统
CORDIC 算法的统一性体现在参数 mm 上,它定义了三种不同的坐标系:
圆周坐标系 (Circular Coordinate System, m=1):这是 Volder 原始算法的基础。其微旋转角度为 ei=arctan(2−i)。用于计算正弦、余弦、反正切、模值等。
线性坐标系 (Linear Coordinate System, m=0):在此模式下,迭代方程退化为简单的移位-累加操作。微旋转被微平移取代,其增量为 ei=2−iei=2−i。用于实现乘法、除法等基本运算。
双曲坐标系 (Hyperbolic Coordinate System, m=−1):其微旋转角度基于双曲函数,。用于计算双曲正弦、双曲余弦、指数函数、对数函数等
迭代方程 (Iteration Equations)
统一算法的核心是以下三个迭代方程,它们在每个计算步骤 \( i \) 中同时执行:
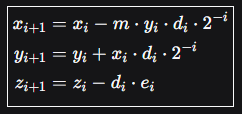
其中:
* \( m \in \{1, 0, -1\} \) 标识坐标系。
* \( d_i \in \{+1, -1\} \) 是方向因子。
* \( e_i \) 是预定义的微角度/值序列,取决于 \( m \)。
* 操作模式决定了 \( d_i \) 的符号:
* **旋转模式 (Rotation Mode)**:\( d_i = \text{sign}(z_i) \)。目标是驱使残余角度 \( z_i \) 趋于零。
* **向量化模式 (Vectoring Mode)**:\( d_i = -\text{sign}(y_i) \)。目标是驱使 \( y_i \) 分量趋于零。
---
转换策略 (Conversion Tactics)
为了实现高精度计算,必须解决两个关键问题:**比例因子** 和 **收敛域**。
**1. 比例因子 (Scale Factor)**
在圆周和双曲系统中,每次迭代都会改变向量的模长。可以证明,总比例因子 \( K \) 为:
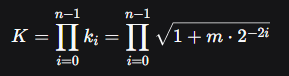
对于圆周系统 (\( m=1 \)),\( K \approx 0.60725 \)。对于双曲系统 (\( m=-1 \)),\( K' \approx 0.82816 \)。处理策略包括:
* **预缩放 (Prescaling)**:将初始输入 \( x_0 \), \( y_0 \) 乘以 \( 1/K \)。
* **后缩放 (Postscaling)**:将最终输出乘以 \( 1/K \)。
* **融合缩放 (Integrated Scaling)**:将缩放操作融入迭代过程,增加额外的迭代步骤。
**2. 收敛域与重复迭代 (Convergence and Repeated Iterations)**
双曲系统 (\( m=-1 \)) 的收敛性需要特别处理。因为序列 \( \arctanh(2^{-i}) \) 的收敛域存在间隙,必须重复特定的迭代索引(例如,i=4, 13, 40, ...)以确保算法对所有有效输入都能收敛。这是该算法实现中的一个关键细节。
---
### **移位器使用 (Shifter Usage)**
CORDIC 算法的效率很大程度上源于对**移位器**的巧妙使用。
* **常数移位**:在每次迭代 \( i \) 中,移位量 \( 2^{-i} \) 是固定的。这意味着硬件实现时,移位器可以是非常简单的、预定义的连线模式,而不是复杂的桶式移位器。
* **规整性**:这种“移位-加”的操作序列非常规整,使得算法极易在微代码ROM或硬件状态机中实现。
---
域拓展
通过结合不同坐标系和模式,该统一算法可以计算大量函数。以下是几个典型示例:
* **计算正弦和余弦**:使用圆周旋转模式,设置 \( x_0 = 1/K, y_0=0, z_0=\theta \)。
* **计算模和幅角**:使用圆周向量化模式,设置 \( x_0=X, y_0=Y, z_0=0 \)。
* **计算乘法**:使用线性旋转模式,设置 \( x_0=x, y_0=0, z_0=y \),结果 \( x \cdot y \) 出现在 \( y_n \) 中。
* **计算指数**:使用双曲旋转模式,设置 \( x_0=1/K', y_0=0, z_0=a \),则 \( e^a \approx \sinh a + \cosh a = y_n + x_n \)。
* **计算自然对数**:使用双曲向量化模式,设置 \( x_0 = w+1, y_0 = w-1, z_0 = 0 \),则 \( \ln w = 2 \cdot z_n \)。
---
硬件实现 (Hardware Implementation)
CORDIC 算法的硬件架构非常简洁和规整。图 1 展示了一个典型 CORDIC 计算引擎的框图。
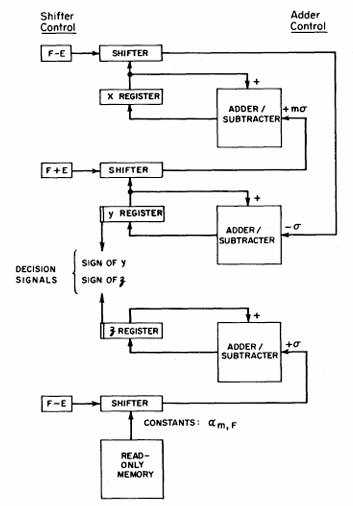
该引擎包含三个主要寄存器(X, Y, Z)和三个功能单元:
1. **两个移位器**:用于对 Y 和 X 寄存器进行 \( 2^{-i} \) 位的移位。移位量由迭代计数器 \( i \) 控制。
2. **三个加法器/减法器**:用于根据符号位 \( d_i \) 执行 X, Y, Z 的加/减操作。
3. **一个只读存储器 (ROM)**:用于存储预先计算好的基本角度/值序列 \( e_i \)。
4. **一个控制逻辑**:用于生成迭代索引 \( i \),控制移位量,并根据当前模式(旋转/向量化)和 \( y_i \) 或 \( z_i \) 的符号来决定 \( d_i \)。
工作流程是循环的:
1. 初始化寄存器 \( X, Y, Z \)。
2. 对于 \( i = 0 \) 到 \( n-1 \):
a. 根据 \( i \) 设置移位量。
b. 从 ROM 中查找 \( e_i \)。
c. 根据模式计算 \( d_i \)。
d. 在一个时钟周期内,并行更新 X, Y, Z 寄存器。
3. 输出最终结果。
这种结构可以实现为**时序型**(一个核心,循环使用)或**流水线型**(多个核心串联,吞吐量极高)。
---
结论 (Conclusion)
本文提出了一种用于计算基本函数的统一算法。该算法是原始 CORDIC 技术的扩展,通过引入坐标系参数 \( m \),将三角、乘除、双曲等计算统一到同一框架下。其主要优点包括:
1. **统一性**:同一套硬件可用于计算多种不同函数。
2. **简洁性**:只需要基本的加、减、移位和表查找操作,无需复杂的乘法器。
3. **规整性**:算法结构规整,非常适合在 ROM、PLA 或简单的微程序控制中实现。
4. **效率**:对于 n 位精度,大约需要 n 次迭代,计算速度与软件乘法相当或更快,且硬件成本低。
该算法特别适用于专用计算机、计算器、数字信号处理器以及任何需要高效计算基本函数的嵌入式系统。它为硬件功能单元的设计提供了一种强大而优雅的范式。
[1] Volder, J. E. "The CORDIC Trigonometric Computing Technique." IRE Transactions on Electronic Computers, Vol. EC-8, Sept. 1959, pp. 330-334.