基于GMapping和蚁群算法的导航方案
REF:基于ROS的移动机器人SLAM建图与路径规划研究
1. 改进Gmapping SLAM建图
- 改进提议分布:
改进策略围绕如何有效利用最近的一次观测数据和基于采样的方法模拟目标分布展开,通过提高提议分布的准确度,即利用观测模型的高准确度来指导粒子的生成和更新。具体讲,从运动模型中采集一系列粒子,利用观测数据对这些粒子进行加权,以选出表现最佳的粒子群体,将这些高权重粒子用于模拟改进后的提议分布。鉴于目标分布通常仅呈现单一峰值,选择直接在峰值附近进行采样,以降低计算负担。通过扫描匹配技术识别出具有较高概率的区域,并在此基础上采样K个样本点,利用这些采样点来模拟高斯函数形式的提议分布。
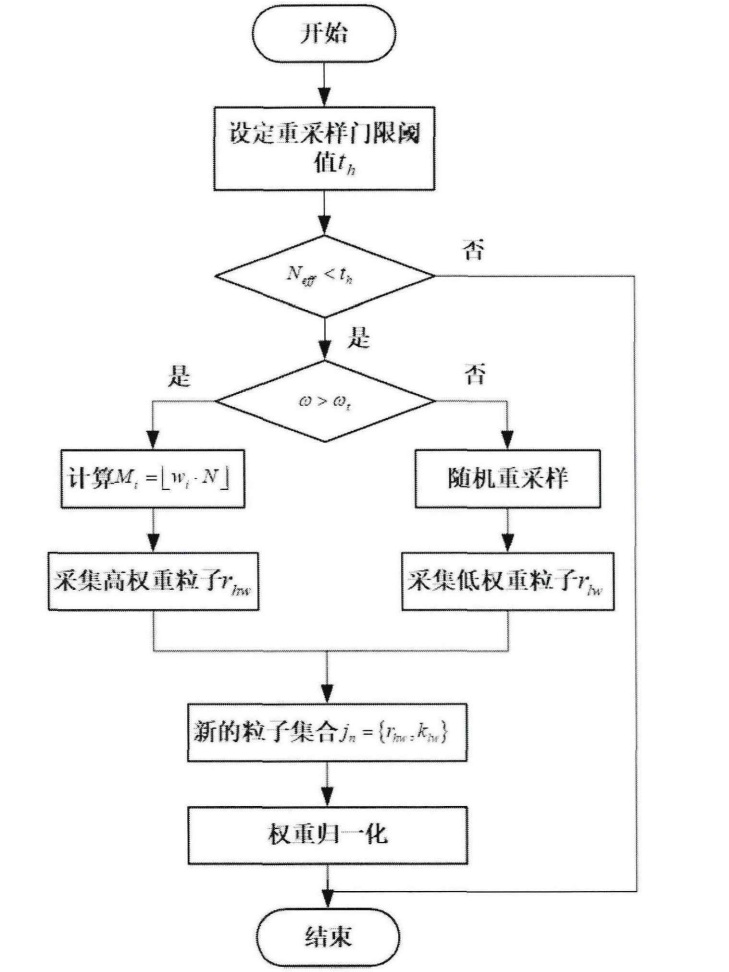
- 改进选择性重采样:
在高权重(设定权重阈值)粒子集合内增加复制粒子的数量,同时在低权重粒子集合内采用随机重采样方法,在保证高质量粒子被有效保留的同时,增加整体粒子的多样性,流程如下:
2. 改进蚁群算法路径规划
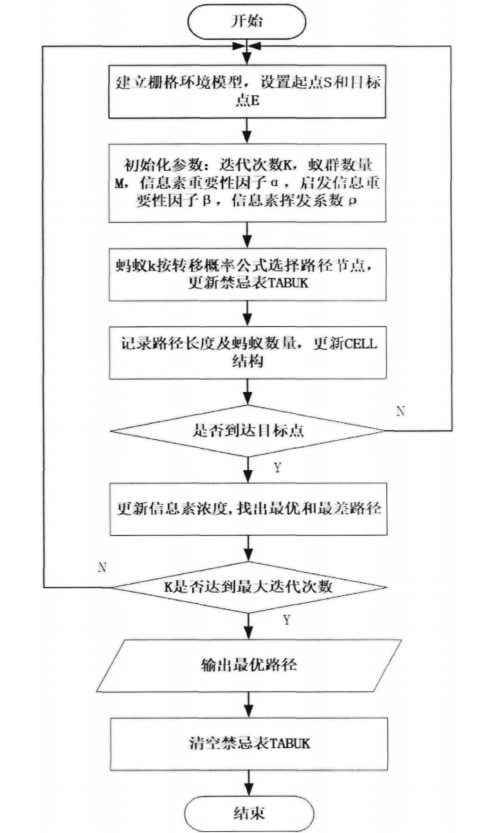
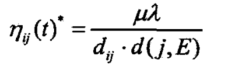
人工势场法改进启发信息函数: 启发式信息中引入与目标点的相对距离信息,增强蚂蚁在搜索过程中对目标的指向性,改进后的启发式信息函数考虑了蚂蚁当前位置到目标点的相对距离,通过调整距离因子和人工势场引力的影响,来指导蚂蚁更加有效地向目标区域探索,其中:
uuu:是用于调节人工势场引力影响程度的常数,(0,1)之间
λ\lambdaλ:是正比例系数,调节目标点距离对启发性的影响
dijd_{ij}dij:是节点i到节点j的距离
d(j,E)是节点j到目标点E的距离,节点离目标点越近,其受到的势能越大,从而能够增加该路径被选择的概率。
改进自适应信息素调节机制: 基于上一代最优路径与最差路径信息素差异的自适应动态调整信息素浓度,增强算法的全局搜索能力和避免过早收敛至局部最优解,在当前路径上留下的信息素增量,并通过最优路径与最差路径间信息素浓度的差异来调节信息素的更新量,其中:
τij(t+1)\tau_{ij}(t+1)τij(t+1):表示下一时刻路径<i,j>上的信息素浓度
ρ\rhoρ:信息素挥发率
(1−ρ)⋅τij(t)(1-\rho)·\tau_{ij}(t)(1−ρ)⋅τij(t)表示信息素的自然挥发部分
Δτij\Delta\tau_{ij}Δτij:是第k只蚂蚁在路径<i,j>上留下的信息素增量
Δτij∗\Delta\tau^*_{ij}Δτij∗:是基于最优路径和最差路径信息素差异的额外信息素调节量
v和w:分别代表最优路径和最差路径上蚂蚁的数量
Q是信息素强度系数
Lmin和LmaxL_{min}和L_{max}Lmin和Lmax:分别代表最优路径长度和最差路径长度
a(t)a(t)a(t):随迭代次数t变化的动态因子,用于平衡探索和利用之间的关系,以适应不同阶段的探索需求


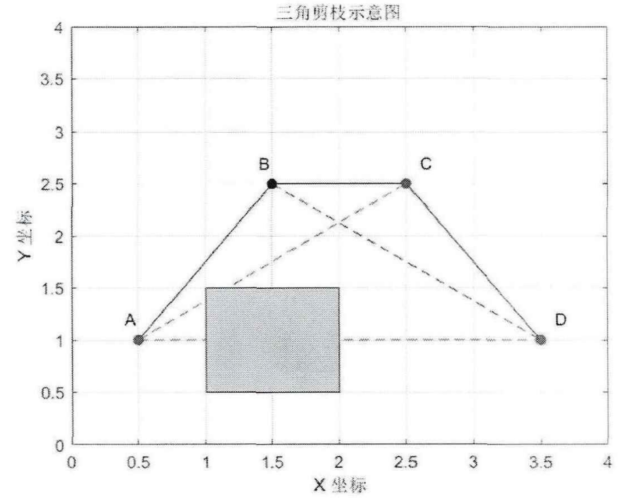
三角剪枝法减少转弯点: 通过识别和连接路径上相邻的转弯点,如果新形成的直线路径没有穿越障碍物,则移除这些转弯点,使路径更直且更短。移除不必要的转弯点和中间点,路径P更直且更短,机器人在行驶过程中不需要频繁转弯,可以提高行驶速度并减少能耗,最终获得一条高效的行驶路线,提升移动机器人在实际应用中的性能。