Platform Health Management 与 EXM/STM 的集成实现方式
今天咱们聚焦《Platform Health Management.pdf》—— 也就是车载 Adaptive Platform 里的‘平台健康管理(PHM)’,专门拆解它的核心逻辑、配置方法,还有和 EXM、STM 的强制集成要点。不管你是做车载 Adaptive 开发的工程师,还是想了解 PHM 底层原理的技术人,这一期都能帮你把 PHM 的‘来龙去脉’捋明白。”
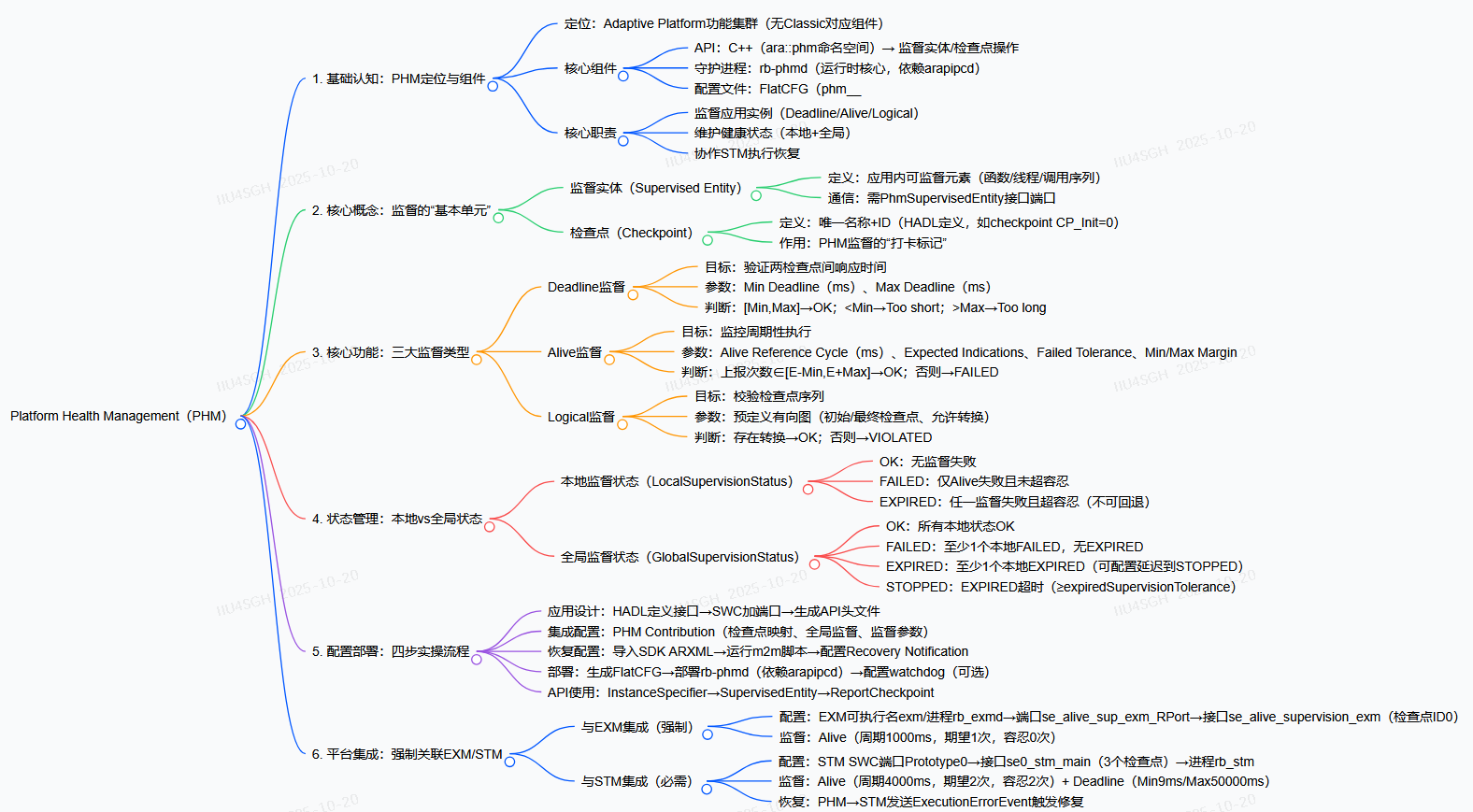
第一部分:先搞懂 ——PHM 到底是个啥?
“首先得明确 PHM 的定位:它是 Adaptive Platform 架构里的核心功能集群,没有 Classic AUTOSAR 的直接对应组件,完全是为‘动态监督平台健康’设计的。它靠三个核心部分撑起来:第一是C++ API,全在ara::phm命名空间里 —— 开发者用它创建‘监督实体’、上报‘检查点’,比如你想监督一个传感器采集线程,就得靠这个 API 初始化监督逻辑;第二是守护进程 rb-phmd,这是运行时的‘大脑’—— 接收应用上报的检查点、判断监督结果(比如响应时间超没超)、维护平台健康状态,还得部署到目标 ECU 上,而且它特别依赖arapipcd(管 P-IPC 通信的进程),没它 rb-phmd 根本跑不起来;
第三是FlatCFG 配置文件,格式是phm__<software