【JETSON+FPGA+GMSL】实测分享 | 如何实现激光雷达与摄像头高精度时间同步?
前言
在现代工业与科研领域,多传感器系统的协同工作已成为常态。无论是自动驾驶车辆的感知系统、工业质检平台,还是科研数据采集装置,都需要多个传感器(如摄像头、激光雷达等)在严格的时间同步下工作。
目前,多传感器系统在数据采集阶段仍面临显著的同步挑战。在分布式系统中,不同传感器具有独立的时钟基准,如何确保不同物理位置的设备能够基于同一时间基准工作,是一个亟待解决的复杂技术难题。
信迈结合在视觉传感与自动驾驶领域的技术积累,创新性地提出“硬件触发 + 协议授时”组合策略,基于自研的CS300 GPS-时间/触发同步盒,打造跨平台、高精度时间同步解决方案,覆盖从多路摄像头同步到多传感器融合的全场景需求。
01
激光雷达与摄像头的同步验证
在自动驾驶、机器人导航和智能交通系统中,激光雷达和摄像头的同步数据采集至关重要。只有保证两者数据在时间和空间上高度一致,才能实现准确的环境感知和目标识别。
同步盒支持PTP 和 gPTP 主/从模式,可作为系统核心时间源,能够生成高精度时间戳和同步触发脉冲,为各类传感器提供统一的时间基准,消除设备间的时间差异。
为验证时间同步方案在多传感器系统中的同步性能,我们在实验室环境下搭建动态模拟场景,通过实时数据记录与分析开展验证测试。
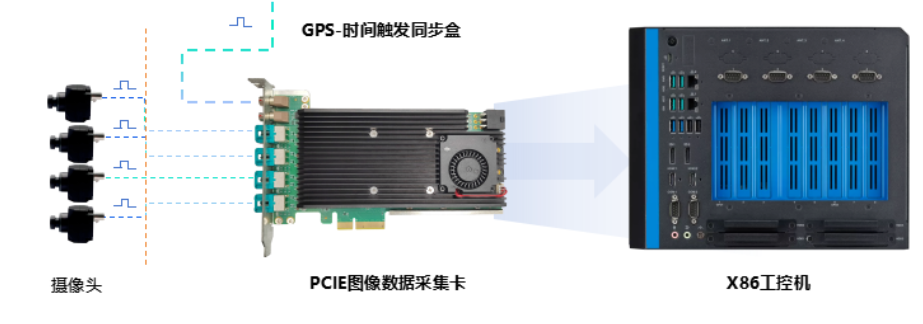
X86平台激光雷达与摄像头同步方案
测试中,CS300 同步盒为 PCIE 图像采集卡提供外部授时信号,精准控制摄像头同步曝光,使其按触发信号完成图像采集与时间戳标记;同时经 PTP 交换机向激光雷达传输时间基准,支持其依据同步时间生成带时间戳的点云数据。
实测结果显示,摄像头与激光雷达不仅实现了高精度时钟溯源与对齐,更达成点云数据与图像数据在频率及相位层面的同步,系统授时精度达微秒级。这一成果展示了多传感器数据融合质量与系统感知可靠性,有效验证了同步方案在多传感器协同场景中的适用性。
02
多路摄像头的同步验证
在智能制造、安防监控和AI视觉分析等领域,多路摄像头同步采集已成为常见需求。多摄像头系统可以同时从不同角度捕获目标信息,提供更全面的视觉数据。实现多路摄像头同步面临的主要挑战包括时间戳对齐和带宽瓶颈。多路摄像头会存在启动时间差或帧间偏移;而带宽限制则可能影响数据传输的稳定性和完整性。
同步盒可生成 10-120Hz 微秒级高精度触发信号,通过GMSL通道高速传输至各摄像头,直接控制其曝光时序,从硬件层面实现曝光同步。此外,GMSL 通道本身具备长距离传输、高带宽、高可靠性及低延迟等核心优势,能为摄像头数据传输的稳定性与完整性提供可靠保障。
为全面评估时间同步方案在多路摄像头系统中的实际性能,我们采用跑马灯测试进行同步精度验证。
验证摄像头图像同步性能,需要可精准控制且时间维度可量化的参考对象。该测试方法通过高速移动的光点模拟动态目标,其时间基准精度高、运动轨迹明确,能够直观、定量地展示不同摄像头曝光时刻之间的偏差,是行业广泛认可的同步性能测试手段。
X86平台多路摄像头同步方案
实测结果表明,在跑马灯测试中,两路摄像头所捕获的图像序列时间戳完全一致,捕捉到的光点位置无偏差,系统整体同步精度达到微秒级别,验证了同步方案优异的时间一致性与运行稳定性,可有效满足了各领域对多路摄像头同步采集的高精度需求。
03
跨平台的同步解决方案
针对不同领域对主机平台的差异化需求,同步方案提供全方位跨平台支持,兼容 X86 系统及各类嵌入式平台,满足多场景应用需求。
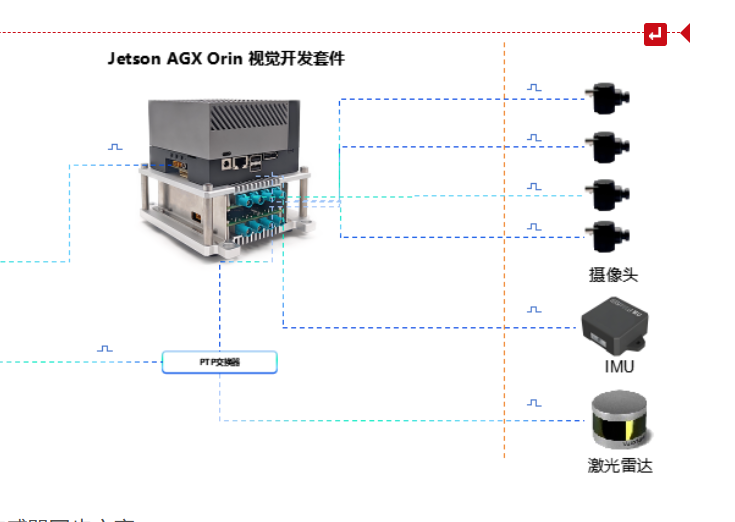
Jetson AGX Orin平台多传感器同步方案
面对人工智能领域嵌入式平台的广泛应用及随之增长的摄像头数据采集与处理需求,针对 NVIDIA Jetson AGX Orin、树莓派 5、瑞芯微 RK3588 等主流开发平台,研发了系列 GMSL 转 MIPI 信号的视觉开发套件。该套件搭配 CS300 同步盒,可同时实现多路摄像头数据的高速采集与精确同步,完美适配嵌入式场景下的高精度视觉应用需求。