设置3D相机触发模式
写在前面
- 本人从事机器视觉细分的3D相机行业。编写此系列文章主要目的有:
- 1、便利他人应用3D相机,本系列文章包含公司所出售相机的SDK的使用例程及详细注释;
- 2、促进行业发展及交流。
设置触发模式及API说明
触发模式说明
- 知微传感Dkam系列3D相机拥有连续模式和触发模式两种工作模式
- 连续模式是3D相机主动采集数据并不断上传输出
- 触发模式是3D相机在收到触发信号后才会采集数据并更新输出
- 知微传感Dkam系列3D相机具备软触发功能
- 知微传感Dkam系列3D相机除D2xx和D300外均具备硬触发功能
- 软触发即发送数据采集命令后采集一次数据,硬触发即有外部电触发信号后采集一次数据
- 硬触发的电气连线方式、电气要求和电气逻辑请参考3D相机说明书
设置流程
API
- SetTriggerMode 设置点云和红外的工作模式
- int SetTriggerMode(Camera_Object_C* camera_obj,int mode)
- 函数功能: 设置点云、红外触发模式
- 参 数: camera_obj:相机的结构体指针 ;mode:模式选择(0 连续 1 触发)
- 返回值: 0:设置成功 非 0:设置失败
- SetRGBTriggerMode 设置RGB的工作模式
- int SetRGBTriggerMode(Camera_Object_C* camera_obj,int mode)
- 函数功能: 设置 RGB 触发模式
- 参 数: camera_obj:相机的结构体指针 ;mode:模式选择(0 连续 1 触发)
- 返回值: 0:设置成功 非 0:设置失败
- SetTriggerSource 触发源
- int SetTriggerSource(Camera_Object_C* camera_obj, int sourcetype)
- 函数功能:设置相机软/硬触发
- 参数:camera_obj:相机的结构体指针 ;sourcetype:相机触发类型(0:软触发 1:硬触发)
- 返回值:0:设置成功 小于 0:设置失败
- 注:该API同时设置红外、点云和RGB的触发源
- SetTriggerCount 触发红外和点云
- int SetTriggerCount()
- 函数功能: 触发相机采集点云和红外数据
- 参 数: 无
- 返回值: 0:设置成功 非 0:设置失败
- SetRGBTriggerCount 触发RGB
- int SetRGBTriggerCount()
- 函数功能: 触发相机采集RGB数据
- 参 数: 无
- 返回值: 0:设置成功 非 0:设置失败
例程及注释
- 本例程基于WIN10+python 3.11.4 + numpy 1.26.4 +DkamSDK_1.6.83验证
- DkamSDK的配置方法请参考SDK说明书
- 本例程在D33XS型相机上验证
from DkamSDK import *
import numpy as npprint('Hello ZhiSENSOR')class DkamSDK_class:def __init__(self):self.point = PhotoInfoCSharp()self.gray = PhotoInfoCSharp()self.rgb = PhotoInfoCSharp()self.point_num = 0self.pointpixel = Noneself.gray_num = 0self.graypixel = Noneself.rgb_num = 0self.rgbpixel = Noneself.gray_cloud = Noneself.rgb_cloud = Nonedef connectSave(self):camera_num = DiscoverCamera()print("局域网内共有",camera_num,"台3D相机")for i in range(camera_num):print("局域网内相机IP为:",CameraIP(i))if CameraIP(i) == b'192.168.40.91':camera_ret = icamera = CreateCamera(camera_ret)connect = CameraConnect(camera)if connect == 0:print("相机连接成功!")width_gray = new_intArray(0)height_gray = new_intArray(0)getwidth = GetCameraWidth(camera, width_gray, 0)getheight = GetCameraHeight(camera, height_gray, 0)width = intArray_getitem(width_gray, 0)height = intArray_getitem(height_gray, 0)print("红外图宽度:%d, 红外图高度:%d" % (width,height))width_rgb = new_intArray(0)height_rgb = new_intArray(0)getrgbwidth = GetCameraWidth(camera, width_rgb, 1)getrgbheight = GetCameraHeight(camera, height_rgb, 1)width_RGB = intArray_getitem(width_rgb, 0)height_RGB = intArray_getitem(height_rgb, 0)print("RGB图宽度:%d, RGB高度:%d" % (width_RGB,height_RGB))self.gray_num = width * heightself.graypixel = bytes(self.gray_num)self.point_num = width * height * 6self.pointpixel = bytes(self.point_num)self.rgb_num = width_RGB * height_RGB * 3self.rgbpixel = bytes(self.rgb_num)grayMode = 1if grayMode == 1:print("设置点云和红外图/点云的工作模式为触发模式。。。")else:print("设置点云和红外图/点云的工作模式为连拍模式。。。")triggerMode = SetTriggerMode(camera, grayMode);if triggerMode == 0:print("设置点云和红外图为触发模式成功!")else:print("设置点云和红外图为触发模式失败!!! 错误码:",triggerMode)RGBMode = 1if RGBMode == 1:print("设置RGB图的工作模式为触发模式。。。")else:print("设置RGB图的工作模式为连拍模式。。。")tirggerModergb = SetRGBTriggerMode(camera, RGBMode);if triggerMode == 0:print("设置RGB图为触发模式成功!")else:print("设置RGB图为触发模式失败!!! 错误码:",tirggerModergb)TrigSour = 0if TrigSour == 0:print("设置触发源为软触发。。。")else:print("设置触发源为硬触发。。。")tirggersource = SetTriggerSource(camera,TrigSour);if tirggersource == 0:print("设置触发源成功!")else:print("设置触发源失败!!! 错误码:",tirggersource)stream_gray = StreamOn(camera, 0)if stream_gray == 0:print("红外图通道打开成功!")else:print("红外图通道打开失败!!! 错误码:",stream_gray)stream_point = StreamOn(camera, 1)if stream_point == 0:print("点云通道打开成功!")else:print("点云通道打开失败!!! 错误码:",stream_point)stream_RGB = StreamOn(camera, 2)if stream_RGB == 0:print("RGB图通道打开成功!")else:print("RGB图通道打开失败!!! 错误码:",stream_RGB)acquistion = AcquisitionStart(camera)if acquistion == 0:print("可以开始接收数据!")else:print("不能接收数据!!! 错误码:",acquistion)FlushBuffer(camera, 0)FlushBuffer(camera, 1)FlushBuffer(camera, 2)triggerCount = SetTriggerCount(camera)if triggerCount == 0:print("点云和红外采集触发成功!")else:print("点云和红外采集触发失败!!! 错误码:",triggerCount)triggerCountRGB = SetRGBTriggerCount(camera)if triggerCountRGB == 0:print("RGB采集触发成功!")else:print("RGB采集触发失败!!! 错误码:",triggerCountRGB)print("等待数据采集、传输。。。")capturegray = TimeoutCaptureCSharp(camera, 0, self.gray, self.graypixel, self.gray_num, 10000000)if capturegray == 0:print("红外数据接收成功!")else:print("红外数据接收失败!!! 错误码:",capturegray)capturePoint = TimeoutCaptureCSharp(camera, 1, self.point, self.pointpixel, self.point_num, 10000000)if capturePoint == 0:print("点云数据接收成功!")else:print("点云数据接收失败!!! 错误码:",capturePoint)captureRGB = TimeoutCaptureCSharp(camera, 2, self.rgb, self.rgbpixel, self.rgb_num, 10000000)if captureRGB == 0:print("RGB数据接收成功!")else:print("RGB数据接收失败!!! 错误码:",captureRGB)gray_name = b"1.bmp"savebmp = SaveToBMPCSharp(camera, self.gray, self.graypixel, self.gray_num, gray_name)if savebmp == 0:print("红外数据保存成功!")else:print("红外数据保存失败!!! 错误码:",savebmp)pcd_name = b"1.pcd"savepcd = SavePointCloudToPcdCSharp(camera, self.point, self.pointpixel, self.point_num, pcd_name)if savepcd == 0:print("点云数据保存成功!")else:print("点云数据保存失败!!! 错误码:",savepcd)rgb_name = b"1_rgb.bmp"savergb = SaveToBMPCSharp(camera, self.rgb, self.rgbpixel, self.rgb_num, rgb_name)if savergb == 0:print("RGB数据保存成功!")else:print("RGB数据保存失败!!! 错误码:",savergb)acquistionstop = AcquisitionStop(camera)streamoff_gray = StreamOff(camera, 0)streamoff_point = StreamOff(camera, 1)streamoff_rgb = StreamOff(camera, 2)disconnect = CameraDisconnect(camera)if disconnect == 0:print("成功断开相机!")else:print("断开相机失败!!! 错误码:",disconnect)DestroyCamera(camera)else:print("相机连接失败,失败代码:",connect) if __name__ == '__main__':DkamSDK_camera = DkamSDK_class()DkamSDK_camera.connectSave()
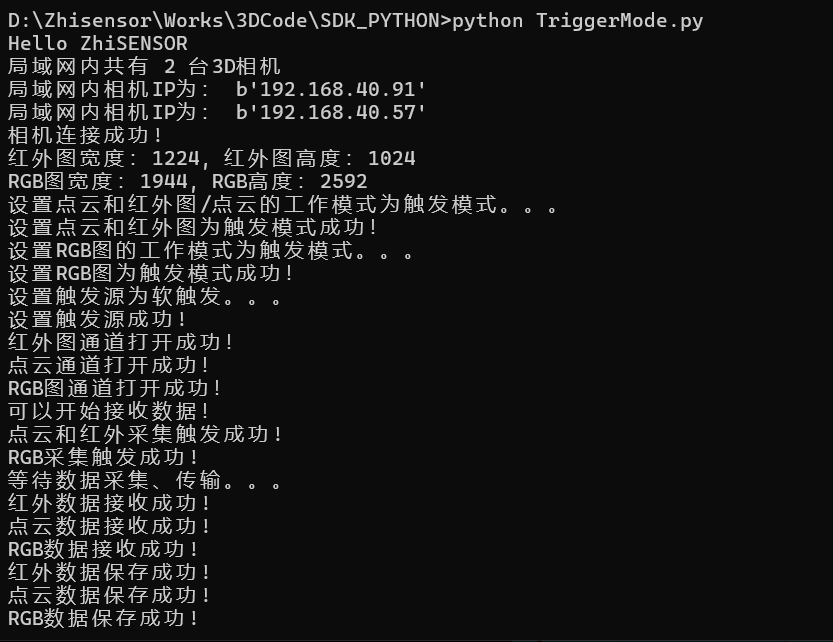
运行结果
后记
- 触发模式下3D相机为主动工作,触发后上位机等待相机拍摄完成并上传,期间3D相机并不会告知上位机当前工作状态
- 如需配置曝光等参数,须在触发采集数据之前