Vis-NIR 与 MIR 光谱的三种传感器融合及建模流程
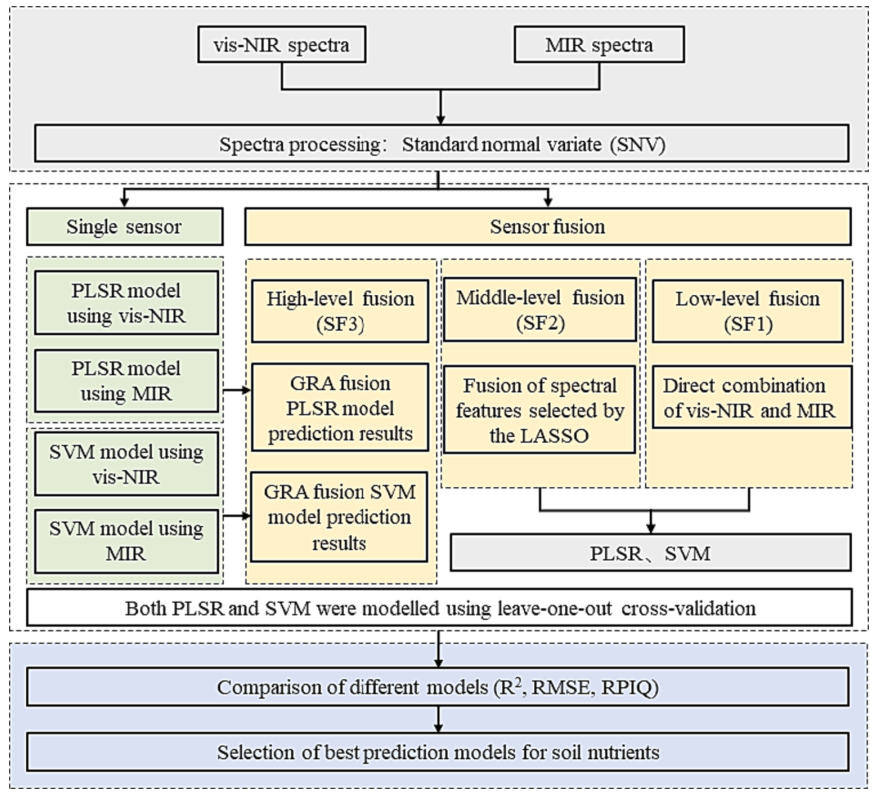
Vis-NIR 与 MIR 光谱的三种传感器融合及建模流程示意图,来自【1】
- 输入数据与预处理
输入光谱:Vis-NIR 光谱、MIR 光谱
预处理:标准正态变量变换(SNV)
由于不同传感器测量的可见光-近红外光谱和红外光谱的能级不一致,如果直接融合可见光-近红外光谱和红外光谱,一些光谱幅度较小的数据会被视为噪声,导致光谱信息融合失败(Zhou et al., 2018)。因此,对可见光-近红外光谱和MIR光谱进行标准的正态变量(SNV)预处理,以消除维数的影响(Feng, 2020; Wang et al., 2022; Xu et al., 2019b)。
- 单传感器建模
建模方法:偏最小二乘回归(PLSR)、支持向量机(SVM) - 三种传感器融合建模
低 Level 融合(全光谱信息保留):将预处理后的 Vis-NIR 光谱(350 ~ 2500 nm)与转换后的 MIR 光谱(2500 ~ 15387 nm)进行拼接。
中 Level 融合(有效特征提取):通过LASSO 算法(最小绝对收缩与选择算子)从两种单光谱中筛选与土壤养分强相关的 “特征波段”,再将筛选后的特征波段拼接融合。
高 Level 融合(决策结果整合):不直接处理光谱数据,而是将两种单传感器模型的预测结果作为输入,通过Granger-Ramanathan 平均法(GRA) 对预测结果进行加权融合
中级融合有以下方法:outer product analysis (OPA), principal component analysis (PCA), the Boruta algorithm, variable projection importance (VIP), and the least absolute shrinkage and selection operator (LASSO)
- 统一建模与交叉验证:所有模型(单传感器模型、三种融合模型)均采用留一交叉验证(LOOCV)
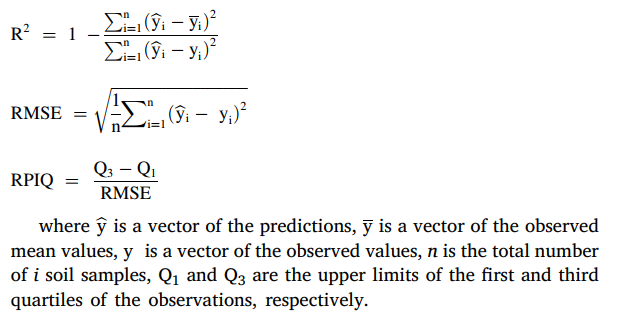
- 模型评估与最优模型筛选:决定系数(R²)、交叉验证均方根误差(RMSE_CV)、四分位距性能比(RPIQ)
6.结果:
TN 的最优模型为 SF2-PLSR(R²=0.83,RPIQ=3.18);
TK 的最优模型为 SF3-PLSR(R²=0.92,RPIQ=5.08);
AN 的最优模型为 SF2-SVM(R²=0.67,RPIQ=2.06);
低预测精度养分(TP、AP、AK),(R2<0.34, RPIQcv <1.55);
a) 名词解释:总氮(TN) 、总磷(TP)、总钾(TK) 、碱解氮(AN)、有效磷(AP)和有效钾(AK) total nitrogen (TN) (Ma et al., 2019a; Ng et al., 2022; Rodríguez-Febereiro et al., 2022), total phosphorus (TP) (Peng et al., 2021), total potassium (TK) (Viscarra Rossel and Webster, 2012), alkali-hydrolyzable nitrogen (AN), available phosphorus (AP) and available potassium (AK) (Guo et al., 2021; Hati et al., 2022).
b) 涉及到原理文献:光谱内C-H、C-O和C-N基团的相互作用可直接影响土壤有机碳(SOC)和氮含量的预测(Greenberg et al., 2020),而土壤P和K与具有可见光-近红外和MIR光谱区吸收特征的土壤属性(如有机碳、矿物质、水分等)的相关性可间接估算(Liu et al., 2018; Mouazen et al., 2010)。
参考
【1】(文中有相应算法首次提出的引用)Li, X., Pan, W., Li, D., Gao, W., Zeng, R., Zheng, G., Cai, K., Zeng, Y., and Jiang, C. (2024). Can fusion of vis-NIR and MIR spectra at three levels improve the prediction accuracy of soil nutrients? Geoderma 441, 116754.https://doi.org/10.1016/j.geoderma.2023.116754