坐标变换介绍与机器人九点标定的原理
一、坐标变换的介绍
1.绕原点旋转的坐标变换
一个点(x,y)绕原点旋转u度,其旋转后的坐标(x1,y1)如何计算?

2.绕任意点的坐标变换
一个点(x,y)绕任意一点(x0,y0)旋转u度,其旋转后的坐标(x1,y1)如何计算?

3.产品实际位置与示教位置有差异,求新的旋转中心的位置
下图所示,机器人示教抓取产品时,旋转中心在(x0,y0);
实际拍照后,发现产品偏移了dx,dy,du, 那么旋转中心到什么位置可以正确的抓取到产品?

public void GetOffsetRotate(double x0,double y0, double x1,double y1, double dx,double dy, double du, out double offsetX, out double offsetY, out double offsetU)
{
//先绕(x0,y0)旋转du度,看得到的新点坐标;
//然后把新点坐标平移到(x1+dx,y1+dy)所需的偏移量就是offsetX,offsetY.
double RotateX, RotateY;
double angle = du * Math.PI / 180.0;
RotateX = x0 + (x1 - x0) * Math.Cos(angle) - (y1 - y0) * Math.Sin(angle);
RotateY = y0 + (x1 - x0) * Math.Sin(angle) + (y1 - y0) * Math.Cos(angle);
offsetX = x1 + dx - RotateX;
offsetY = y1 + dy - RotateY;
offsetU = du;
}
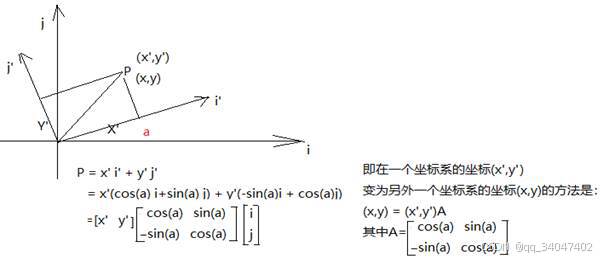
4. 坐标系变换后,同一点坐标的关系
a. 仅坐标系旋转,同一个点在两个坐标系中的转换关系。
下图解释:同一个P点在(i’ j’)坐标系下的坐标(x’,y’) 与(i j)坐标系下(x,y)的关系。