基于CAN的UDS诊断服务
1. 引言与问题导入
- 故障发生原因:设计、生产、制造、使用、老化、意外等因素导致汽车在生命周期任何阶段都可能发生故障。
- 车载控制器功能需求:
-
故障感知与通知:作为零部件系统大脑,需能感知并告知使用者或维修人员故障信息;
-
状态存储功能:需存储故障状态或ECU状态以便后续分析;
-
测试支持功能:需提供硬件控制等故障测试功能;
-
数据传输功能:支持数据读写以便故障观测;
-
安全保障:在安全前提下实现上述功能。
-
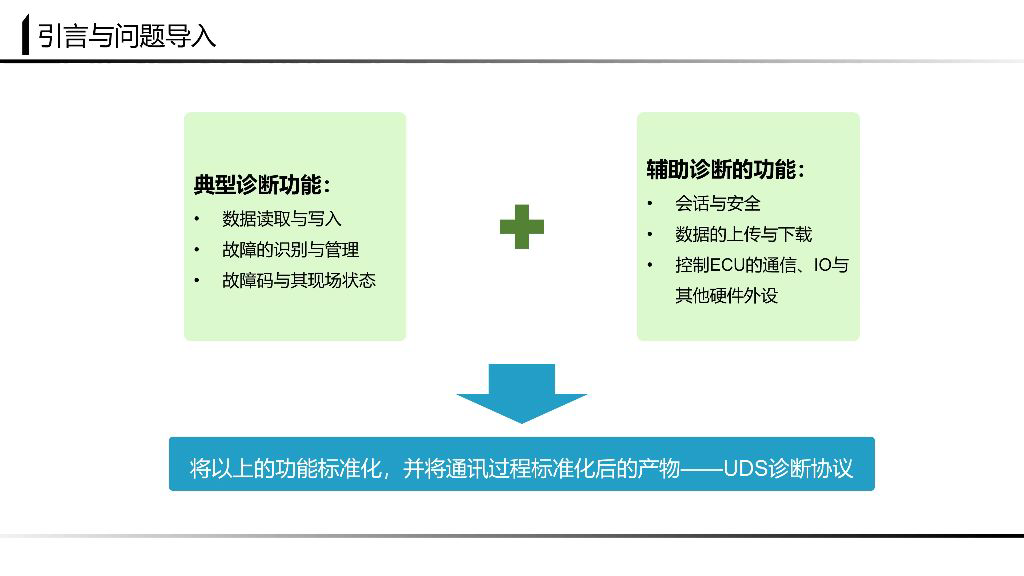
典型诊断功能:
-
核心功能:数据读取与写入、故障识别与管理、故障码与其现场状态;
-
辅助功能:会话与安全控制、数据上传与下载、控制ECU通信/IO及其他硬件外设;
-
标准化产物:将上述功能及通信过程标准化后形成UDS诊断协议。
-
2. 缩略词
| 分类 | 缩略词 | 全称 | 含义说明 |
|---|---|---|---|
| 协议相关 | UDS | Unified Diagnostic Services | 统一诊断服务,ISO14229协议定义的汽车通用诊断服务 |
| BSW层模块 | DCM | Diagnostic Communication Manager | 诊断通信管理器,负责接收并响应诊断仪数据请求 |
| BSW层模块 | DEM | Diagnostic Event Manager | 诊断事件管理器,处理诊断事件信息及相关数据 |
| BSW层模块 | CANTP | CAN Transportation | CAN传输层/模块,实现标准CAN传输层协议 |
| 诊断标识 | DID | Data ID | 数据标识 |
| 诊断标识 | SID | Service ID | 服务标识 |
| 诊断标识 | DTC | Diagnostic Trouble Code | 故障码 |
| 诊断标识 | RID | Routine Control ID | 例程标识 |
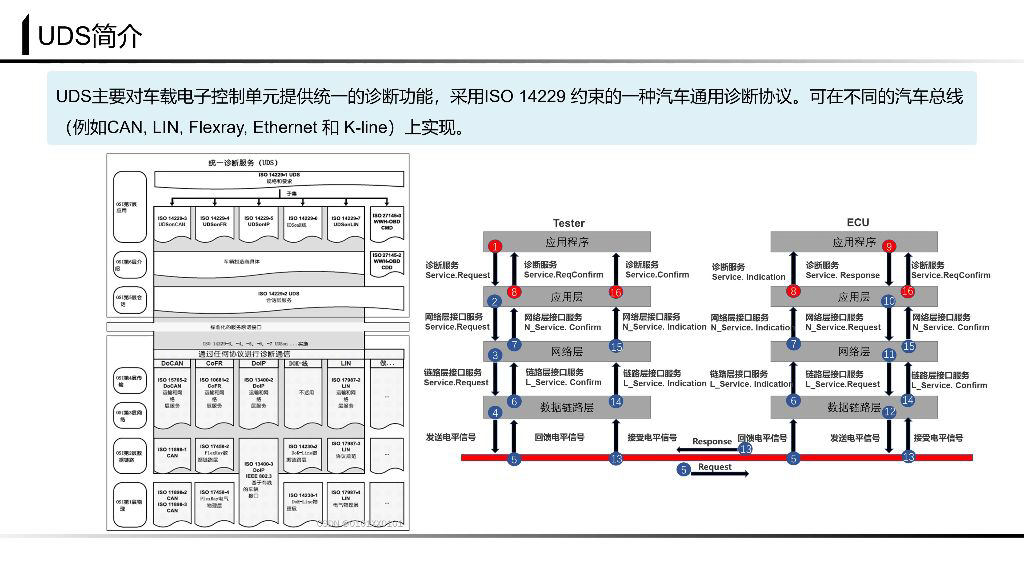
3. UDS简介
- 协议定位:
- 应用层协议:位于OSI模型第5-7层,基于ISO14229协议;
- 多总线支持:可在CAN、LIN、Flexray、Ethernet和K-line等不同汽车总线上实现。
- 协议分层:
- 上层协议:ISO14229定义应用层服务;
- 中层协议:ISO15765和ISO13400规定传输层和网络层;
- 底层协议:各总线标准的数据链路层和物理层协议。
- 诊断交互流程:
- 请求路径:诊断仪(tester)→应用层→网络层→链路层→电平信号→总线→ECU;
- 响应路径:ECU→网络层→数据链路层→诊断仪各协议栈解析→显示结果;
- 核心模块:DCM和DEM模块配合应用程序处理诊断请求与响应。
4. 诊断数据传输过程
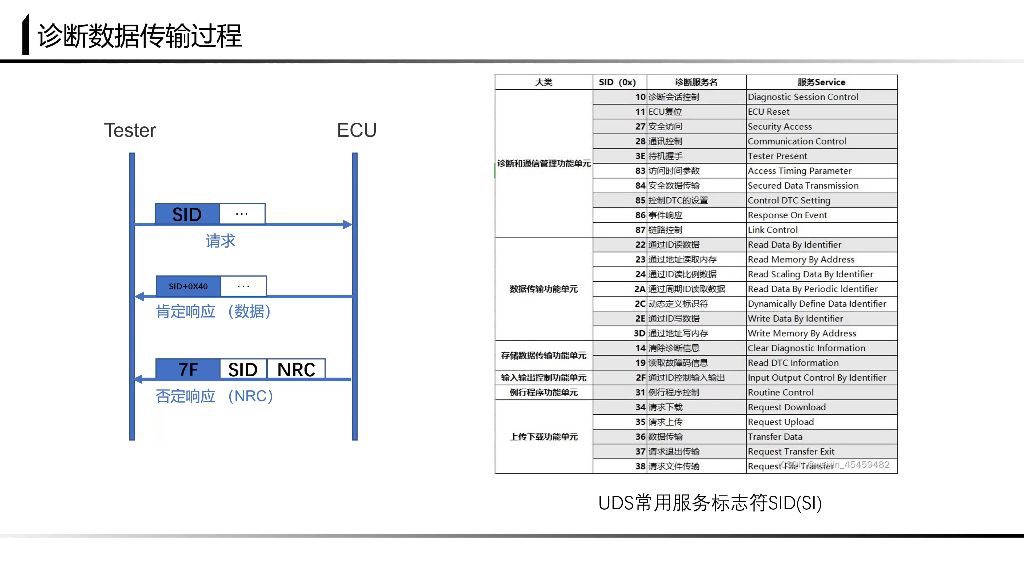
- 基本流程:由Tester发起诊断请求,发送SID+数据;ECU根据SID判断响应方式。
- 响应类型:
- 肯定响应:SID+0x40+数据;
- 否定响应:7F+SID+NRC(否定响应码)。
(1)UDS常用服务标志符
| 服务类别 | 服务名称 | SID | 功能说明 |
|---|---|---|---|
| 诊断和通信管理 | 会话控制 | 10 | 切换ECU诊断会话(如Default/Extended/Programming会话) |
| 诊断和通信管理 | 安全机制 | 27 | 种子-密钥验证,解锁高权限操作(如刷写、清除关键DTC) |
| 诊断和通信管理 | 通信控制 | 28 | 开启/关闭ECU某条总线的通信(如关闭CAN报文发送) |
| 诊断和通信管理 | 握手协议 | 3E | 维持诊断会话连接(防止ECU退出诊断模式) |
| 数据传输功能 | 数据读取 | 22 | 通过DID读取ECU特定数据(如ECU版本、传感器值) |
| 数据传输功能 | 内存操作 | 23/3D | 23服务读内存地址数据,3D服务写内存地址数据 |
| 数据传输功能 | 动态定义 | 2C | 动态组合多个DID数据,实现自定义数据读取 |
| 存储数据传输 | 故障码管理(清除) | 14 | 清除ECU存储的DTC及相关状态 |
| 存储数据传输 | 故障码管理(读取) | 19 | 读取DTC列表、DTC状态、冻结帧等信息 |
| 输入输出控制 | IO控制 | 2F | 控制ECU IO端口或外设状态(如点亮LED、驱动电机) |
| 上下装功能 | 数据传输(下载/上传) | 34-38 | 34请求下载、36传输数据、37请求退出,实现ECU程序刷写或数据上传 |
(2)应用案例(车门控制器仿真)
- 安全控制机制:
- 会话分级:Default session(受限权限)→ Extended session(更多数据)→ Programming session(Flash刷写权限);
- 安全验证:采用27服务,通过种子-密钥机制验证上位机合法性。
- 数据操作演示:
- 读取示例:成功读取ECU序列号(22服务);
- 通信控制:通过28服务关闭/恢复ECU通信。
- 故障码管理:
- 注入电压过低故障码(19服务读取);
- 清除故障码(14服务)。
- 协议实现特点:
- 传输层依赖:可在CAN/以太网等不同总线上实现(UDSonCAN/UDSonIP);
- AUTOSAR架构:应用层(DCM+DEM模块)、传输层(CAN TP报文重组)、数据链路层(CAN IF驱动交互)。
5. AUTOSAR架构下的诊断模块
(1)通信描述
- PDU数量与长度:系统中有5条用于诊断通信的IPDU,每条PDU长度固定为8字节。
- 帧对应关系:每个PDU都有对应的诊断帧(Diagnostic Frame)在通信系统中。
- 诊断帧类型:
- Physical Request:诊断仪发送给ECU的物理请求帧;
- Physical Response:ECU返回给诊断仪的物理响应帧;
- Functional Request:诊断仪通过功能寻址发送的功能请求帧(多ECU同时响应)。
- 配置检查要点:
- 收发配置验证:在系统描述阶段需确认目标ECU(特别是VCU)是否正确配置了诊断报文的收发功能;
- 自动生成机制:若配置无误,BSW生成阶段工具可自动生成相关通信配置;
- ODX文件支持:工具支持ODX文件导入,但当前版本该功能尚不完善。
- PDU生成机制:
- 自动生成条件:当系统信息描述配置完全正确时,BSW生成工具会自动创建所需PDU;
- PDU数量计算:针对3种诊断报文(2条Request+1条Response),考虑IF/TP层连接后共需生成9个PDU;
- 关联关系验证:需特别检查PDU与DCM(诊断通信管理器)之间的连接关系。
(2)BSW配置
① 函数请求PDU配置
- 路径连接:从CAN IF到CAN TP,再到PduR,最后到DCM模块;
- 长度特性:各连接段的PDU长度均为8字节。
② 物理响应PDU配置(Physical Request PDU 路径与模块创建)
- 传输方向:诊断仪向ECU发送的诊断请求;
- 逆向路径:从CAN IF到CAN TP,再到PduR,最后到DCM模块;
- 模块检查:需在COM Stack的CAN Modules下确认诊断相关模块是否建立完成;
- 创建步骤:首先创建缺失的CAN TP模块。
③ DCM与DEM模块创建
- 创建位置:在BSW Modules下的Service文件夹中创建;
- 模块关系:DEM模块可与DCM模块放在同一个ARXML文件中描述;
- 创建结果:完成诊断相关的所有模块建立(DCM/DEM/CAN TP)。
④ 配置思路与模块关系
- 核心模块:DCM与DEM是处理应用层协议的核心;
- 数据传输流:DCM通过PduR将PDU传给CAN TP进行包重组→CAN TP调用CAN IF将报文发送到CAN总线;
- 配置顺序:在CAN IF模块已建立的前提下,优先配置CAN TP模块。
⑤ CAN TP模块配置
- 配置选项:
- Burst Q Sites:可保持默认不配置;
- RB Page Confirmation:建议先失能;
- 读参数API:默认不使用;
- 重点区域:配置完成后需重点关注CAN TP Channels配置。
⑥ CAN TP Channel配置
- 命名规范:通道建议命名为UDS;
- 模式选择:选择全双工模式;
- 关键参数:
- Main Function Period:设置为1ms处理周期;
- Max Count:选择4条通道以留有余量;
- 报文对应:
- 需要配置2个Rx NSDU(物理寻址和功能寻址);
- 1个Tx NSDU(对应Physical Response)。
⑦ TX SDU配置
- 时间参数:
- NAs:设置为1.0秒;
- NBs:设置为1.0秒;
- NCs:设置较小值;
- 功能配置:
- Transmit Cancellation:建议启用;
- Addressing Format:选择标准ID;
- Padding Activation:建议启用;
- 类型选择:需选择CAN TP Physical类型;
- 引用设置:需正确选择CAN TP Tx NSDU Reference。
⑧ 物理请求PDU配置
- SDU来源:从DCM模块通过P-DUR传输过来的SDU数据;
- 筛选目的:需要通过TP层的channel使用N-PDU发送出去;
- 筛选方向:首先关注response方向的发送流程;
- 筛选步骤:
- 响应筛选:因为是发送方向,首先筛选response响应;
- 数据确认:确认从P-DUR过来的SDU数据;
- 配置准备:需要为SDU配置对应的N-PDU;
- 传输路径:从TB模块到IF模块的physical response;
- 网络隔离:由于TP层存在网络隔离机制;
- 特殊处理:需要为数据创建RXFCN-PDU;
- 创建原因:TP层的网络隔离机制要求;
- 选择标准:根据实际需求选择合适的配置参数;
- 配置要点:确保与上层模块的通信协议匹配。
⑨ 应用案例(例题:物理请求配置)
- 配置流程:
- 上位机发送physical request到ECU;
- 配置txn pdu和sdu;
- 创建两条rx ns du;
- 关键参数:
- Nbl选择0;
- Ncr选择1;
- Addressing format根据实际CAN ID类型选择standard;
- Padding activation选择CAN TP on;
- STmin时间参数设置为0.002;
- 注意事项:
- 带星号的ID不进行配置,等待生成阶段工具自动配置;
- 命名需对应functional/physical类型;
- 工具配置涉及arxml文件写入,速度较慢。
- NSDU配置:
- 决定CAN TP将重组后的network PDU传送给上层哪个节点;
- 上层将functional request发送给PDUR;
- 需要选择CAN TP to PDUR;
- NPDU配置:
- 链接CAN IF与CAN TP模块;
- functional接收只需配置rx n pdu;
- 需要准确选择对应模块。
⑩ 应用案例(例题:物理响应配置)
- 响应配置:
- 配置txf CN pdu作为物理网络传输层响应;
- 选择physical response(CAN TP to CAN IF);
- 需要配置对应的SDU(PDUR到CAN TP);
- 网络管理:
- 可为functional通道配置网络管理;
- 需要添加txf CN pdu;
- 若无相关ECU可不配置;
- 概念区分:
- 需清楚区分OSI模型中SDU和NPDU的概念;
- SDU是服务数据单元;
- NPDU是网络协议数据单元;
- 理解概念后配置PDU链接会更简单;
- 配置关系:
- PDUR连接CAN TP与DCM模块;
- 数据流向:上位机→ECU节点→CAN TP→PDUR;
- 可参考J1939的TP层进行类比学习;
- 后续步骤:
- 完成CAN TP配置后;
- 需要继续配置PDUR模块。
⑪ PDU配置
- 模块连接:数据由PDUR模块将CAN TP与DCM进行连接,需要配置PDUR模块;
- 声明检查:进入PDUR模块后,首先检查BSW Modules中是否有CAN TP的使用声明,若无声明需手动添加;
- 参数需参考标准配置:特别注意新创建的CAN TP模块是否被正确引用。
⑫ 路径配置
- 绝对路径验证:必须检查模块对应的绝对路径是否正确,确认路径指向新建的CAN TP模块;
- 路径错误会导致通信失败;
- DCM检查:完成CAN TP检查后需同步验证DCM配置。
⑬ 路由表配置
- 自动生成验证:检查工具是否自动生成双向路由(CAN TP→DCM方向、DCM→CAN TP方向);
- 手动配置要点:
- 若未自动生成需手动配置;
- 配置内容必须与CAN通信配置完全一致;
- 需要建立PDUR与DCM的SDU双向传输通道。
⑭ 配置完成验证
- 最终检查项:
- CAN TP的SDU正确传输至DCM;
- DCM的SDU通过PDUR返回至CAN TP;
- 确认双向通信链路完整建立;
- 配置完成标志:成功实现PDU路由功能即表示配置完成。
⑮ UDS应用层配置模块(DCM模块配置)
General配置项
- 模块构成:包括General配置项和Config Set配置项,需先建立UDS协议应用层基础概念;
- 配置建议:建议通过网文和标准资料充分理解UDS协议的服务、元素和关键词;
- 关键参数:
- response all request:选择FALSE;
- task time:设置为0.001秒(1毫秒);
- vap I:选择FALSE;
- dcmv in reference:需在config set配置完成后引用。
RB General配置项
- 重要配置项:
- NRC控制:先进行negative response code控制;
- 功能开关:
- application called request.required on request reception:关闭;
- tx confirmation:关闭;
- confirm for dsd:暂时关闭;
- 非必要项:
- ecu reset time:可不定义;
- OS counter ID:默认使用第一个counter ID;
- count them.macro:暂不定义;
- 队列配置:
- 选择cyclic count;
- dcm rb query of request enabled:使能队列;
- rte support:选择TRUE;
- storing enabled:选择TRUE。
DSL配置
- 五大配置选项:
- DSD:Diagnostic Server Dispatcher,连接DSL与DSP的桥梁;
- DSL:Diagnostic Session Layer,负责数据流、诊断状态和时间参数管理;
- DSP:Diagnostic Service Processor,处理诊断服务;
- Page Buffer Config:处理page buffer;
- Processing Conditions:涉及DCM模式管理。
DSL Buffer配置
- Buffer作用:用于DCM数据交互,涉及CAN发送和接收;
- 配置参数:
- 命名为"ud son can rx";
- buffer size:根据MCU RAM空间配置(示例给1024);
- dcm dsl dag response maximum number response pad:设置为5。
DSL Protocol配置
- 连接配置:
- 协议类型命名为"uds on CA";
- 最大response size:设置为20;
- priority:选择1;
- trans type:保持默认;
- paint on trans to boot:选择FALSE;
- P2/P2*时间参数:给0.2(需根据实际场景调整);
- protocol rx buffer:选择之前配置的"ud son can rx";
- SID table:可暂用默认service table。
Connection配置(Main Connection)
- dsm dsl protocol rx tester source address:设置为0(根据实际地址配置);
- comm channel:使用CAN network channel。
二、配置连接
1. 接收functional和physical请求
- 功能请求通道:在main connection中需要配置functional request通道,type选择functional type;
- 物理请求通道:同时需要增加protocol rx的物理通道,用于接收physical request;
- PDU连接:这里的PDU是DCM模块与TANtb模块连接的SDU,需要选择从PDUR到DCM模块的PDU。
2. 配置physical通道
- 通道类型选择:必须明确选择physical类型;
- 方向配置:配置从PDUR到DCM模块的PDU;
- 注意事项:需要特别注意选择physical.response.dcm two p dur。
3. 配置发送protocol
- 物理通道建立:需要配置一条physical的发送通道;
- 完成标志:完成DCM DC DSL配置后,即建立了UDSON CAN的所有配置内容。
三、总线上UDS协议的实现
- 协议投射:整个UDS协议需要映射到特定总线;
- 映射方法:在DSL的protocol下面进行分组映射;
- 实现位置:通过总线配置实现协议的具体传输路径。
四、dcm dsd的配置
1. 展开service table
- 初始配置:创建DCM模块时默认生成table 0,作为服务配置的基础框架;
- 服务创建位置:在table 0下的dcm dsd services中创建UDS协议支持的具体服务。
(1)诊断会话控制配置示例
- 命名规范:将service table命名为UDS协议标准名称,show name需简洁(如删除"dsd service"前缀);
- 关键配置项:
- SID处理函数:配置Dcm diagnostic session control函数,处理服务请求;
- 服务ID格式:16进制显示(如session control对应),十进制需填写16;
- 子服务支持:session control等服务需开启subfunction支持(设为true);
- 会话类型创建:
- default session:session for boot选no boot,level=1,P2=0.05,P2* server max=5;
- programming session:system boot,level=2;
- extended session:no boot,level=3;
- 配置技巧:
- 使用ctrl+空格调出提示时必须切换至纯英文输入法;
- 应用层检查函数可为空,表示不进行额外状态检查;
- mode rule reference可复用通用准则,未建立时暂不配置。
五、dsd配置讲解
- 基础服务集:必须包含session control、security access、communication control等核心服务;
- 关键配置要点:
- 每个服务需明确适用的session和security level;
- 函数声明需准确(如routing control需声明Dcm routing control函数);
- service ID必须严格匹配UDS协议定义;
- 调试建议:
- 不确定参数可参考标准工程模板;
- 优先完成基础配置,debug阶段再针对性修正;
- 扩展会话等特殊功能需引用对应的security level。
六、DSP配置项
- 功能定位:DSP(Diagnostic Service Process)是DCM模块的核心部分,负责处理诊断服务的配置项;
- 配置内容:主要配置服务数据、控制对象、会话模式、安全等级等UDS管理元素;
- 配置依据:需要根据实际诊断设计完成,通常由诊断工程师建立诊断数据库文件;
- 数据定义:在诊断文件中定义ECU支持的UDS服务、DID、RID等操作对象。
1. DSP清除DTC
- 功能关联:与清除DTC服务(14服务)直接相关;
- 配置选项:
- 可配置清除DTC前的检查函数;
- 可配置对应的检查规则(rule);
- 注意事项:需要与DSD中建立的服务相匹配才能被Tester使用。
2. 通信控制
- 管理方式:
- 可一次性管理所有通道;
- 可单独设置(Setting)特定通道;
- 可管理单独节点(Node);
- 功能实现:
- 支持通信通道开关控制;
- 支持PDU组的开启/关闭;
- 配置原则:根据实际使用场景开放相应功能并正确引用。
3. 授权
- 功能作用:提供路由执行前的校验选项;
- 校验条件:
- 可声明需要符合的RAW条件;
- 可设置安全等级要求;
- 可配置会话规则限制;
- 应用场景:常用于需要安全检查的Routing配置。
4. Ctrl DTC设置
- 配置内容:
- 可启用/禁用Function功能;
- 可配置记录(Record)选项;
- 可设置Enable Mode的引用;
- 实现方式:通过右键新增功能项进行配置。
5. DID配置
- 数据类型定义:
- 定义DID所属的数据类型;
- 以真空泵压力(Vacuum Pump Pressure)为例;
- 基本属性:
- 配置是否需要Init Function;
- 设置大小端(Endianness);
- 定义数据Size和类型;
- 接口配置:
- 提供ASW层访问的Client-Server接口;
- 可配置Block ID引用;
- 支持Data Redefinition功能。
6. DID信息配置
- 功能支持:
- 配置DID支持的读写功能;
- 设置对背后IO的单独控制;
- 高级控制:
- Must Control功能支持;
- Freeze Current State支持;
- Reset to Default功能支持;
- 实现方式:通过展开具体DID项进行详细配置。
7. DSP内存配置
- 功能用途:定义按地址读取数据时的内存范围;
- 配置要求:需要明确指定内存地址范围;
- 关联功能:与内存读取类诊断服务(23服务)直接相关。
8. 周期性DID传输配置
- 功能用途:支持周期性上传DID数据;
- 配置方式:在此配置项中设置传输参数;
- 实现条件:需要底层通信协议支持。
9. PID配置
- 配置内容:
- 设置Buffer Size;
- 定义Control ID;
- 操作方法:通过右键使用相关功能;
- 关联功能:与Request Control服务(2F服务)相关。
10. 路由配置
- 参数设置:
- 配置Start/Stop支持;
- 定义路由参数;
- 接口提供:配置后DCM模块会提供应用层调用接口;
- 实现方式:需要建立完整的路由参数配置。
11. 安全和会话配置
- 功能范围:涉及Session Control(10服务)和Security Access(27服务);
- 配置内容:定义需要引用的安全元素;
- 管理对象:配置会话和安全访问相关参数。
12. 车辆信息配置
- 功能用途:定义整车基础信息用于车辆识别;
- 配置内容:设置VIN等车辆标识信息;
- 应用场景:用于诊断仪识别车辆。
13. ECU复位配置
- 功能关联:与UDS复位服务(11服务)相关;
- 配置内容:
- 声明支持的复位类型;
- 设置复位相关参数;
- 扩展功能:配置Read DTC相关工作参数。
七、DCM模块配置总结
- 核心配置项:
- DSD:配置诊断服务(如10/22/27服务);
- DSL:配置UDS通信链路(如PDU连接、时间参数);
- DSP:配置UDS基础服务元素(如DID、DTC、内存范围);
- 配置原则:
- 严格遵守UDS标准(ISO14229);
- 依据诊断数据库文件提供的信息;
- 保持与DSD配置的协同性;
- 注意事项:配置量较大,需抓住各配置项的核心功能定位。
八、dm模块配置
1. components配置
- 服务实体定义:在ASW层为每个DDC创建的服务实体,需要定义每个component对应的DTC测试;
- 状态传递机制:
- 故障处理:当component对应的DTC测试失败时,需配置是否使用port传递状态;
- 回调函数:可定义回调函数,当component失败时决定是否使用ASW层的port;
- 代码生成:配置完成后生成代码,会在ASW层的DEM模块中看到这些port,用于应用层与其他模块交互。
2. 消抖机制配置
- 消抖目的:
- 提高正确率:提高故障确定的正确率;
- 减少误报:通过消抖机制减少误报情况;
- 消抖类型:
- 计数器消抖:基于计数器的消抖方式(Counter Base);
- 时间消抖:基于时间的消抖方式(Time Base);
- 实现机制:
- 模板类应用:定义的元素作为模板类,可通过DC event parameter引用;
- 故障判定:当故障出现时,记录上报次数和持续时间,与预设值对比后确定是否上报;
- 配置建议:
- 名称提示:配置名称提供良好提示;
- 查看说明:配置时注意查看quick info中的提示内容。
3. dtc类别配置
- 基础类选择:所有使用的DTC都是counter base的class,以0d零幺这个base class为例进行展示;
- 行为定义:
- debounce行为:需要定义debounce freeze和reset两种类型;
- 步长设置:需要定义counter的decrement step和increment step size;
- 阈值设定:需要配置threshold值;
- 状态存储:counter storage可选择true或FALSE,决定是否储存counter状态;
- 时间基频:
- 基频选择:可以1毫秒或更短时间作为处理基频;
- 配置方式:未声明时可右键展开创建子元素查看;
- 辅助工具:quick info可帮助建立配置模式和提供配置提示。
4. dtc属性配置
(1)dtc的存储老化机制和snapshot功能
- 老化机制原理:在特定周期后,若相关DTC故障恢复,需经过一定时间和状态验证才能清除。老化代表故障消除的验证过程。
- snapshot功能:故障发生时记录相关数据(如发动机转速等),后续读取DTC时可上传故障冻结帧和整车快闪数据供分析人员使用。
- 配置要求:需明确定义记录哪些数据,包括DM存储等功能都需要在此配置。
(2)配置选项:aging circle counter threshold
- 支持开关:首先需配置是否支持DTC老化功能。
- 周期阈值:定义经过多少个操作周期后,DTC可以退出(需设置具体周期数值)。
- 优先级设置:需配置DTC的优先级等级。
- 故障类型:可选择故障类型为"疑问故障"(significant fault)或"偶发故障"等不同类型。
(3)配置选项:freeze frame records
- 存储开关:需配置是否存储冻结帧数据。
- 记录容量:定义最大支持的冻结帧记录数量。
- 数据引用:可引用aging circle等参数(但aging operation circle需在general部分定义)。
(4)配置选项:extended data class
- 周期定义:操作周期可理解为不同整车状态周期,包括:上下电周期、休眠周期、通讯故障恢复周期;
- 扩展数据:需引用需要在DTC发生时记录的扩展数据类,这些数据会和冻结帧一起被记录;
- 引用方式:只需将需要记录的内容引用到配置中即可。
(5)配置选项:dem的memory
- 内存类型:需要为attributes添加DEM内存配置,包括:主内存(primary memory)、镜像内存(mirror memory)。
(6)dem的ddc配置:功能组严重度、标识和替代ddc
- 功能配置:在DEM的DDC中需要明确定义:功能组严重度、标识信息、替代DDC(alternative DTC);
- 属性引用:需在DDC中引用之前创建的DTC属性选项。
5. dtc配置
- 命名规范:需要为DTC进行命名,并确定其是否为functional的一个字节;
- 信息展示:需要展示严重度信息和处理方式;
- 关键属性:DDC值、Alternative DTC、OBD相关属性;
- 参数引用:必须引用在DC attributes中定义的参数和内容。
6. dm事件参数配置
(1)参数组构成
- 包含要素:Component优先级、失败次数、来源种类、存储方式、描述和汇报行为时机;
- 引用关系:需要引用已创建的component和DTC元素;
- 类型定义:需注意定义引用类型。
(2)配置层级
- 汇报对象定义:需明确DTC汇报对象是在BSW层还是ASW(SWC)层;
- 展开配置:Callback定义、Debounce algorithm class引用、Event class引用;
- 配置要点:按照诊断数据库要求逐步创建、注意基础概念的串联、细心完成每个配置项。
7. general配置分类
(1)general的配置分类概述
- 分类依据:根据功能特性将general配置分为四大类型;
- 配置特点:相较于config set,general配置内容多而杂,需要结构化处理。
(2)功能型的配置:call back类型
- 定义方式:需要手动定义call back函数,在集成阶段进行补充;
- 触发机制:当特定条件满足时自动调用预定义的函数;
- 实现选择:可调用用户自定义函数或系统内置函数实现功能;
- 配置建议:根据实际需求选择开启/关闭对应功能项。
(3)数据定义型的配置
- 核心功能:定义需要记录的数据和状态信息;
- 典型配置:extended class基础信息、free frame相关数据、DDC运行状态数据;
- 应用场景:为诊断事件提供数据存储结构。
(4)存储型的配置
- 管理对象:非易失性数据(NvM管理);
- 关键内容:DTC故障码、冻结帧状态、内存分配设定;
- 模块联动:需与NvM模块建立关联配置。
(5)模式型的配置
- 配置要素:存储条件(storage condition)、触发条件、响应动作;
- 功能说明:定义DDC在特定条件下的行为模式。
(6)与UDS服务相关的配置:call back类型
- 实现方式:通过状态变化触发回调函数;
- 函数类型:支持用户手写函数或系统内置函数;
- 配置原则:按需开启功能,避免不必要的性能开销。
(7)dem clients配置
- 核心功能:创建响应诊断事件的客户端;
- 关键配置:
- dem clients use rte选项:开启时所有DEM交互必须通过RTE执行,关闭时允许直接交互;
- 数据元素class定义;
- 配置建议:根据系统架构需求选择RTE交互方式。
(8)数据元素配置
- 定义内容:时间状态(年月日)、计数器(counter)、扩展类数据记录(extended class data record)、故障挂起计数器(fault pending counter)、供电电压(supply voltage);
- 配置方法:确定data size、设置port传输选项;
- 应用接口:通过ASW-DM接口传递数据。
(9)诊断DID配置
- 功能说明:为DTC提供数据引用支持;
- 创建要素:DID名称引用、data elements元素关联;
- 配置特点:创建过程相对简单直接。
(10)事件内存配置
- 内存类型:mirror memory、primary memory、user defined memory;
- 配置要求:仅需声明即可,无需复杂操作。
(11)扩展数据冻结帧配置
- 功能用途:DTC发生时记录系统快照供分析;
- 配置原则:按需添加、后续可在DDC中引用;
- 引用关系:三类数据存在相互引用,需注意创建顺序;
- 最佳实践:先创建数据元素,再建立引用关系。
(12)NvM Block配置
- 必要性:DEM管理大量非易失性数据;
- 关键配置:NvM block ID定义、DEM与NvM模块联动配置;
- 对应关系:要求block一一对应确保断电存储。
(13)DTC分组配置
- 分组类型:powertrain(动力总成)、chassis(底盘)、body(车身);
- 引用机制:DTC通过引用分组声明功能归属。
(14)运行周期配置
- 功能关联:与DTC老化机制相关;
- 周期定义:ECU上下电周期、运行时间周期;
- 实现方式:生成周期函数、在适当位置调用开始/结束函数。
(15)RB General配置
- 功能特性:实现DEM模块功能剪裁;
- 配置建议:初始保持默认状态、参考quick info和帮助手册、特殊设计时检查相关配置项;
- 最佳实践:配置前通读所有功能说明。
(16)DEM General主配置
- 配置层级:子配置选项的上层配置;
- 配置内容:基础DEM支持项选择、UDS协议类型指定(ISO 14229);
- 注意事项:不要遗漏主配置项的设置。
九、内容总结
1. UDS协议基础概念
- 协议定义:本章介绍了用于汽车诊断的UDS协议(Unified Diagnostic Services);
- 数据传递逻辑:详细讲解了该协议的数据传输机制和通信原理;
- 工具演示:使用CANoe工具展示了该应用层协议的实际功能和应用场景。
2. AUTOSAR架构下的配置分析
- 分层配置:基于OSI网络模型,配置分为四个层级:应用层、数据传输层、数据链路层、物理层;
- 配置参考:传输层以下的配置可参考CAN通信部分的知识。
3. 重点配置模块
- 核心模块:CAN TP(传输协议层)、DCM(诊断通信管理器)、DEM(诊断事件管理器);
- 学习建议:
- DCM和DEM配置较为复杂;
- 需要查阅更多相关资料才能深入理解;
- 建议多阅读Quick Info和帮助手册内容。
4. 学习资源建议
- 推荐资料:系统Quick Info文档、官方帮助手册;
- 学习方法:
- 反复阅读相关资料;
- 通过实践加深理解;
- 重点关注DCM和DEM模块的配置细节。
十、知识小结
| 知识点 | 核心内容 | 考试重点/易混淆点 | 难度系数 |
|---|---|---|---|
| UDS协议基础 | 统一诊断服务协议定义、功能架构及通信流程(ISO14229) | 服务类型区分(6大类SID,如10会话/22读DID/19读DTC) | ⭐⭐⭐ |
| 诊断会话控制 | Default/Extended/Programming三种会话模式及安全机制(27服务种子-密钥) | 会话切换条件与安全种子验证流程 | ⭐⭐⭐⭐ |
| 数据读写服务 | DID标识读写(22/2E服务)、故障码读取(19服务) | 物理寻址(单ECU响应)与功能寻址(多ECU响应)的区别 | ⭐⭐⭐ |
| 故障管理机制 | DTC生成规则、冻结帧记录、老化计数器 | 消抖算法(时间/计数双机制)的实现逻辑 | ⭐⭐⭐⭐ |
| 通信层实现 | CAN TP分段传输、ISO15765传输层协议 | N_PDU(网络PDU)与N_SDU(网络SDU)的映射关系 | ⭐⭐⭐⭐ |
| AUTOSAR集成 | DCM-DEM模块分工(DCM处理请求/DEM管理DTC)、诊断事件处理流程 | NVBlock与DTC存储的关联配置 | ⭐⭐⭐⭐⭐ |
| 安全访问机制 | 27服务安全等级、密钥交换算法 | 否定响应码(NRC 0x22权限不足/0x33密钥错误) | ⭐⭐⭐⭐ |
| 演示案例 | CANoe仿真:会话切换/DID读写/DTC注入 | 物理响应(带ECU地址)与功能响应报文的差异 | ⭐⭐⭐ |