如何对抗GPS欺骗式干扰之二:多天线阵列测向的识别原则和应用场景
如何对抗GPS欺骗式干扰之二:多天线阵列测向(二)
在前面的文章如何对抗GPS欺骗式干扰之二:多天线阵列测向(一)中我们介绍了为什么多天线阵列测向可以识别对抗GPS欺骗式干扰,以及多天线测向的基本原理,计算公式等。
今天我们还是就多天线阵列测向识别GPS欺骗式干扰的问题,继续讨论下面这些问题:
-
计算出到达角之后,根据什么原则判断确实出现了欺骗式干扰
-
当我们用多天线测向发现欺骗式干扰之后,应该采取哪些抑制和消除干扰的措施呢?
-
多天线测向方式有哪些缺点?
-
多天线测向抗欺骗式干扰在哪些场景下会失效?
识别和判断欺骗式干扰的原则
在上一节我们说过,由于真实的卫星的位置相对GPS接收机的空间分布式均匀的,不同卫星的到达角相差很多,不会出现很多卫星都在同一个方向或者近似方向的情况。
而欺骗式干扰发生器一般安装在地面或者贴近地面(比如无人机)的载体上,对于GPS接收机来说,伪造的假信息来自于同一个方向或者相似的方向。这种欺骗信号在空间上呈现出来自“同一个方向”的高度一致性是识别欺骗式干扰的理论基础。
那么,在工程实际中,我们根据多天线阵列计算出当前接收到达的每个卫星的到达角(AOA)之后,我们根据什么原则来识别和判断接收到的卫星信号是欺骗式的假信号呢?
原则1 :计算多个卫星的到达角是否在一个小范围的空间区域内
这是最基本,最直接,最有效的原则。
基本原理:
因为来自多颗不同卫星的真实信号,信号的来向肯定是分散在天空各处的;而来自单个欺骗干扰发生器的假信号,信号的来向必然是集中在同一个方向的。
判断步骤:
-
计算所有卫星信号的到达角: GPS接收机跟踪所有可见的卫星信号(例如10颗),分别计算出它们的到达角(方位角θ, 俯仰角Φ)。
-
进行空间组合分析: 计算这些到达角两两之间的角距离。判断是否存在一个“卫星信号组合”,即多个卫星信号的到达角非常接近,落在一个很小的空间锥角内(例如,角距离阈值设定为:小于5°)。
-
设定判决阈值: 设定一个数量阈值。例如,如果超过N颗卫星(比如N=4或5)的信号都来自这个小范围(角距离阈值)的集中方向,则系统会做出判断。
判决结论:
如果存在这样一个小范围的角距离空间,在该空间内包括多颗卫星信号,那么系统将以极高的置信度判定在这个小范围的角距离空间内的卫星信号是欺骗式干扰。
原则2:利用星历进行方向性判断
基本原理:
我们在GNSS(北斗、GPS)接收机的定位精度计算 中介绍过,每个卫星播发的电文数据中都包括自身的星历数据,星历数据中包括卫星的轨道参数,GPS接收机利用接收到的星历数据中的轨道参数,可以计算出卫星的位置。
那么根据卫星的位置,GPS接收机的大概位置,就可以计算出卫星信号的入射方向。
一个欺骗式干扰发生器可以伪造星历数据,但是伪造的信号是从一个固定的发射点发射的,不可能做到从星历数据所代表的天空位置发射过来。
因此,通过星历计算出的卫星信号的入射方向,必须跟多天线阵列测向计算出来的入射方向相匹配,这个是利用卫星星历进行方向性判断的原理。
判断步骤:
1.接收并解析卫星星历: 接收并解析每一个卫星播发的导航电文中的星历。
2.预测到达角: 根据解析出的星历和GPS接收机自身的大致位置,计算出这颗卫星此刻应该在天空的哪个方向,即得到一个“预测到达角”
3.预测值和计算值比对: 将这个“预测到达角”与通过天线阵列实际测量出的该卫星的到达角进行比较。
判决结论:
如果根据星历计算得到的到达角预测值与通过多天线阵列计算得到的到达角测量值之间的误差远大于合理范围(例如,误差超过10°,需要考虑测量精度、电离层折射等因素),系统则判定该颗卫星信号存在欺骗。
多天线阵列检测到欺骗式干扰之后,能够采取哪些抗干扰措施呢?
上面介绍的多天线阵列到达角的测量和计算方法,都是用来检测GPS欺骗式干扰的,那么当检测到存在GPS干扰信号之后,能够采取哪些抗干扰措施呢?
首先,最简单的方法是告警和隔离,也就是给上层的应用系统告警,告诉应用程序,当前GPS接收机受到欺骗式干扰影响,定位结果不可靠。应用程序不再使用GPS定位结果,或者把GPS数据的权重降低。
另外,还有更有效的抗干扰方法。
我们在GNSS抗干扰天线的选型、测试方法以及为什么不能做RTK?(抗干扰内容全集)和自适应调零抗干扰天线为何不适合进行RTK差分定位(二)中介绍过多阵列天线组成的抗干扰天线,通过空时滤波的方式,在干扰来向上产生“零陷”,也就是在干扰来向,产生几十个dB的功率衰减,从而达到抑制干扰的目的。
既然多天线阵列能够测量到达角,识别出在这个方向上存在欺骗式干扰,那么,同样的多天线阵列能不能通过空时滤波,在欺骗式干扰的来向上产生“功率零陷”呢?
答案是肯定的。
具体的实现步骤如下:
-
锁定欺骗式干扰的方向: 系统通过多天线阵列测向计算出了欺骗干扰的精确到达角(例如:方位35°,俯仰10°)。
-
形成零陷 : 天线阵列的抗干扰算法会根据干扰的到达角,计算出一组移相和加权系数,并应用到每个天线单元接收到的信号上。经过信号的相位移动和幅度加权处理,从而在对应方向上形成一个极深的“零陷”,来自欺骗干扰方向的信号得到了有效的抑制。
-
其他方向的卫星信号正常接收: 与此同时,天线仍然可以在其他方向正常接收真实的卫星信号,从而达到正常定位的目的。多阵列天线放线图和零陷
多阵列测向方法会在哪些场景下失效
任何抗欺骗式干扰的手段都不是万能的,多阵列测向方法也有它的局限性,在某些条件下可能会失效?
总结起来,多阵列测向方法主要有以下3种失效的场景:
复杂电磁环境下的多路径影响
在城市峡谷、山区、港口或大型建筑群的附近,存在信号的多次发射,欺骗信号会经过多条路径到达多天线阵列。GPS接收机不仅会收到来自欺骗干扰的直射信号,还会收到一个或多个来自不同方向的欺骗式干扰的强反射信号。
测向算法可能会将一个欺骗式干扰的强反射信号误判为一个独立的“卫星”信号,从GPS接收机来说,该欺骗式干扰的到达角就不再是干扰发生器位置和多天线阵列的夹角,而是反射物体和天线阵列的夹角,导致GPS接收机对欺骗式干扰源的来向判断出现错误。
另外,直射信号与反射信号的叠加,会导致天线单元上测得的载波相位出现错误,导致到达角计算出现巨大误差。
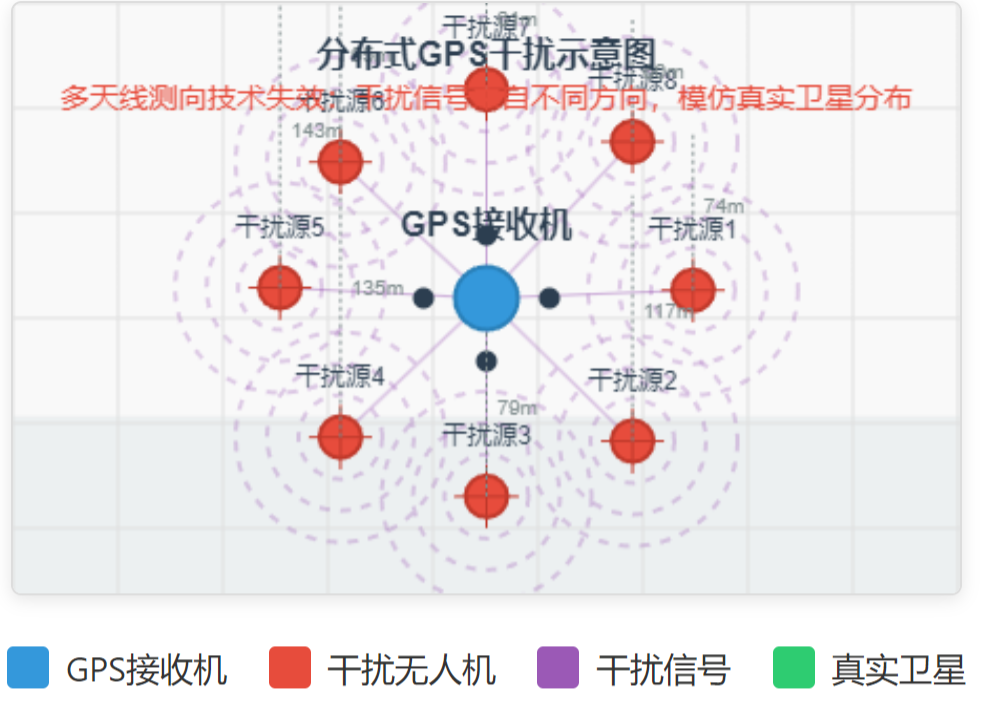
分布式多干扰源系统
简单来说,既然多阵列测向识别欺骗式干扰的原理是:干扰发生器来自于同一个物理位置导致干扰信号到达天线阵列的到达角相同或接近,那么,
如果我们在不同的位置(比如多个无人机)上放置多个欺骗是干扰发生器,每个干扰发生器只模拟一个卫星信号或少数几个卫星信号,从而在空间角度上模仿真实卫星的分布,那么,多阵列天线测向结果就不存在所有信号来向相同或接近的情况,抗干扰就失效了。
理论上是这样的,如果攻击方真的有能力完成了分布式多干扰源系统的建设,对多天线阵列测向抗干扰来说,就是灾难性的。
分布式GPS干扰
但是,正如我们在GPS欺骗式干扰的产生中所提到的,要想实现欺骗式干扰,必须满足:
-
欺骗式干扰源需要获取当前区域的真实GPS信号,并解算出接收机的近似位置。
-
根据想要欺骗目标的位置,计算每颗卫星相对于真实位置和目标位置的伪距差。
-
每个欺骗式干扰源都据其干扰源所在的地理位置和想要模拟的卫星,生成相应的卫星信号,并调整信号的发射时间(控制码相位和载波相位)使得在目标接收机处与真实信号相同。
-
所有欺骗式干扰源之间还需要通过高精度时钟同步来保证信号的时间一致性。
要想实现这种分布式的多干扰系统,系统的复杂度,实现难度、花费的成本是非常高昂的,只有国防军事领域才有实力和动力能够实现,商用和民用领域是很难采用这种分布式干扰源系统的。
压制式干扰和欺骗式干扰组合
如果攻击者在发射欺骗干扰的同时,还同时发射一个大功率的宽带噪声干扰,那么对于GPS接收机来说,整个背景噪声会被抬高,接收机接收所有信号的信噪比(SNR)会急剧降低。
而天线阵列测向需要测量入射信号的载波相位,载波相位的观测精度依赖于信号的信噪比。在极低的信噪比环境下,信号被噪声淹没,接收机无法从信号中提取出稳定、干净的相位信息。此时,计算出的到达角也会变得不可信。