【三维重建-对极几何】极线约束(Epipolar Constraint)
文章目录
- 极线约束(Epipolar Constraint)总结
- 一、基本定义
- 二、几何直观
- 三、核心数学关系
- 1. 极线方程
- 2. 点在极线上的条件
- 四、基础矩阵 FFF
- 五、几何要素总结
- 六、特殊情况:立体校正(Rectified Stereo)
- 七、在 MVS / SfM 中的作用
- 八、核心意义总结
- 九、直观类比
- 十、总结一句话
极线约束(Epipolar Constraint)总结
一、基本定义
极线约束(Epipolar Constraint) 描述了两幅图像中对应点之间的几何关系。
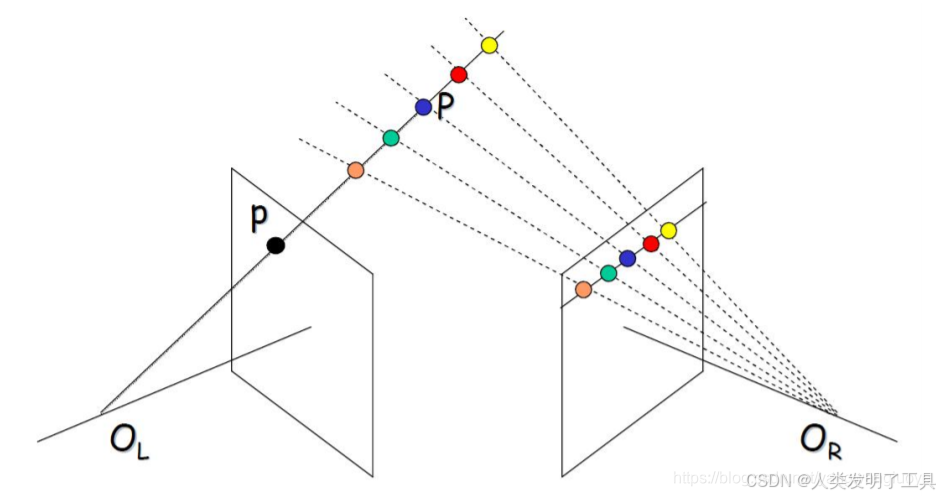
对于两台相机拍摄的同一个三维点 PPP,它在两张图像中的投影 ppp 与 p′p'p′ 满足以下关系:
p′TFp=0p'^{\mathsf{T}} F p = 0 p′TFp=0
其中,FFF 是两幅图像之间的 基础矩阵(Fundamental Matrix)。
二、几何直观
-
两个相机中心 O1O_1O1 与 O2O_2O2 以及三维点 PPP 构成一个 极平面(Epipolar Plane)。
-
该平面与两幅图像平面相交,形成两条直线:
- 左图的极线 lll
- 右图的极线 l′l'l′
因此,当一个点 ppp 在左图中确定后,它在右图中的对应点 p′p'p′ 一定落在对应的极线 l′l'l′ 上。
三、核心数学关系
1. 极线方程
l′=Fpl' = F p l′=Fp
表示:左图中点 ppp 在右图像中的极线。
2. 点在极线上的条件
若点 p′=[x′,,y′,,1]Tp' = [x',, y',, 1]^{\mathsf{T}}p′=[x′,,y′,,1]T 位于直线 l′=[a,,b,,c]Tl' = [a,, b,, c]^{\mathsf{T}}l′=[a,,b,,c]T 上,则有:
ax′+by′+c=0a x' + b y' + c = 0 ax′+by′+c=0
代入极线方程即可得到:
p′TFp=0p'^{\mathsf{T}} F p = 0 p′TFp=0
这就是极线约束的代数表达式。
四、基础矩阵 FFF
基础矩阵 F∈R3×3F \in \mathbb{R}^{3 \times 3}F∈R3×3 编码了两幅图像之间的几何关系(旋转和平移):
F=K′−T,[t]×,R,K−1F = K'^{-\mathsf{T}} ,[t]_{\times}, R, K^{-1} F=K′−T,[t]×,R,K−1
其中:
- K,,K′K,, K'K,,K′:两相机的内参矩阵
- R,,tR,, tR,,t:相机 2 相对于相机 1 的外参
- [t]×[t]_{\times}[t]×:平移向量 ttt 的反对称矩阵:
[t]×=[0−tztytz0−tx−tytx0][t]_{\times} = \begin{bmatrix} 0 & -t_z & t_y \ t_z & 0 & -t_x \ -t_y & t_x & 0 \end{bmatrix} [t]×=[0−tzty tz0−tx −tytx0]
五、几何要素总结
| 概念 | 符号 | 含义 |
|---|---|---|
| 极点 | e,,e′e,, e'e,,e′ | 另一相机光心在当前图像中的投影位置 |
| 极线 | l,,l′l,, l'l,,l′ | 极平面与图像平面的交线 |
| 极平面 | — | 由两相机光心与空间点 PPP 构成的平面 |
| 基础矩阵 | FFF | 将一图像中的点映射为另一图像中的极线 |
| 极线约束 | p′TFp=0p'^{\mathsf{T}} F p = 0p′TFp=0 | 对应点必须位于极线上 |
六、特殊情况:立体校正(Rectified Stereo)
当两台相机光轴平行、仅沿 XXX 轴平移时:
- 极线为 水平线
- 匹配搜索可简化为同一行内的水平搜索
这就是 极线校正(Epipolar Rectification) 的几何目的。
七、在 MVS / SfM 中的作用
| 应用场景 | 作用 |
|---|---|
| SfM(Structure from Motion) | 估计基础矩阵,恢复相机姿态 |
| MVS(Multi-View Stereo) | 用极线约束限制匹配搜索范围(由二维降为一维) |
| 双目立体匹配(Stereo Matching) | 通过极线约束简化代价计算与匹配搜索 |
八、核心意义总结
| 项目 | 说明 |
|---|---|
| 公式 | p′TFp=0p'^{\mathsf{T}} F p = 0p′TFp=0 |
| 含义 | 两幅图像的匹配点必须位于同一极平面上 |
| 几何本质 | 三维点、两相机中心共面 |
| 代数意义 | 点 p′p'p′ 在极线 FpF pFp 上 |
| 结果 | 搜索空间由二维降为一维,计算效率显著提升 |
九、直观类比
| 几何对象 | 类比 |
|---|---|
| 极线方程 l′=Fpl' = F pl′=Fp | 像“影子”一样投射到另一张图 |
| 极线约束 p′TFp=0p'^{\mathsf{T}} F p = 0p′TFp=0 | 表示“点在影子线上” |
| 基础矩阵 FFF | 连接两张图像的几何变换关系 |
十、总结一句话
极线约束 = 对应点共面约束。
它让我们不用在整幅图中搜索对应点,只需在一条极线上搜索,
是多视图几何与三维重建的几何基础。