USCTNET:一种用于物理一致性高光谱图像重建的深度展开核范数优化求解器
摘要
从单张RGB图像重建高光谱图像(HSI)是一个不适定问题,且在相机光谱灵敏度(CSS)与场景光照参数误设时会导致物理不一致性。本文将RGB至HSI重建定义为基于物理建模的逆问题,通过在可学习的变换域中引入核范数作为正则项,并显式估计CSS与光照以嵌入每次迭代的前向算子,从而确保色度一致性。为规避奇异值阈值法(SVT)所需的全奇异值分解(SVD)的高计算成本与不稳定性,我们提出一种数据自适应的低秩子空间SVT算子。基于此,开发了USCTNet——一种专为HSI设计的深度展开求解器,其将参数估计模块与可学习的近端更新操作耦合。在标准基准上的大量实验表明,该方法在重建精度上持续优于当前最先进的基于RGB的方法。代码:链接 USCTNet-Code-Implementation.git
索引词— 高光谱图像重建,深度展开网络
1. 引言
从单张RGB图像 X ∈ R<sup>3×N</sup> 中恢复高光谱图像 Y ∈ R<sup>B×N</sup> 是一个高度不适定问题,且在未知相机或光照条件下常出现色度不一致性。高光谱图像在波段维度上表现出显著的低秩结构[4],这促使我们采用核范数正则化作为一种基于物理原理的先验[5]。然而,其近端算子——奇异值阈值法需要重复进行奇异值分解,导致计算量大且在深度训练中梯度不稳定[6]。
为解决这些挑战,我们将RGB至HSI重建表述为一个基于物理建模的逆问题,并开发了USCTNet——一种嵌合成像物理与低秩先验的展开式求解器。令 S ∈ R<sup>3×B</sup> 表示相机光谱灵敏度矩阵,ℓ ∈ R<sup>B</sup> 表示场景光照光谱,则前向模型为:
X = ΦY, Φ = S Diag(ℓ) (1)
(本研究由国家重点研发计划项目(项目编号2023YFD1701001)资助。)
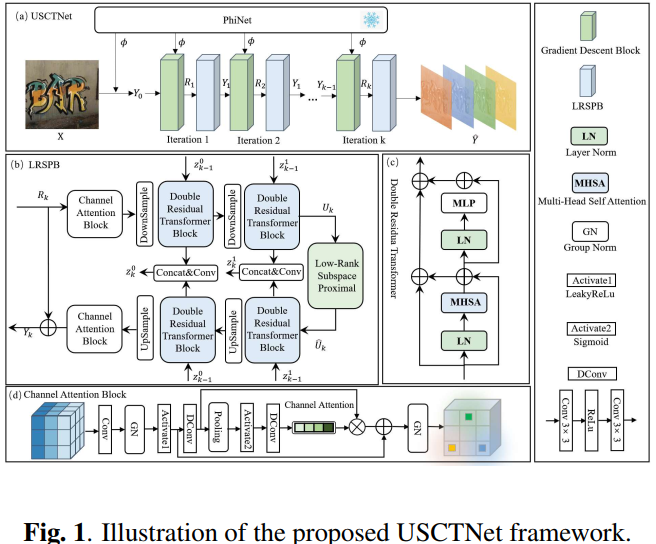
图1. 提出的USCTNet框架示意图
USCTNet通过显式估计前向算子 Φ 来驱动物理引导的梯度更新步骤。在可学习的变换域中,低秩子空间近端算子 通过用学习化的子空间软阈值处理替代全SVD奇异值阈值法,以强制施加核范数先验,从而提升稳定性和效率。
主要贡献:
(1) 提出USCTNet:一种基于物理的展开求解器,将RGB至HSI重建构建为可学习变换域中的核范数正则化逆问题;
(2) 显式估计前向算子 Φ 并用于驱动数据保真度更新,确保色度一致性,提升跨相机和光照的泛化能力;
(3) 提出LRSP:一种应用于数据驱动子空间的可学习软阈值近端算子,避免全SVD计算并稳定训练过程;
(4) 在标准数据集上,USCTNet在重建精度、感知质量和颜色一致性方面均达到当前最优效果。
2. 相关工作
1) 基于RGB的光谱重建
早期的CNN或Transformer方法通过利用空间-光谱相关性来学习RGB到HSI的映射,并取得了较高的精度[8,13]。然而,由于缺乏显式的物理模型,这些方法在域偏移下常导致色彩伪影和不一致的RGB重建结果[2]。结合相机光谱灵敏度约束的物理一致性模型改善了色彩保真度[3,2],但这些方法依赖于网络预测的零空间分量,且可能通过伪逆投影放大噪声。此外,现有方法较少利用结构先验。鉴于高光谱图像已被充分证实的低秩特性,核范数正则化成为一种自然的先验选择。
2) 结合低秩先验的深度展开网络
深度展开网络将迭代优化算法重构为可学习模块,并利用高效的近端算子[7,16]。近期研究尝试通过变换或扩展表示来展开核范数优化[5,20],但大多数仍依赖于奇异值分解,这在高光谱图像尺度下计算成本高昂且可能破坏训练稳定性——从而催生了基于子空间感知、无需全SVD的替代方案。
3) 免全SVD的近端映射
奇异值阈值法需要重复进行全SVD,对高维高光谱图像计算量巨大。矩阵分解方法通过低秩因子近似核范数[18];随机子空间投影通过在紧凑基上操作来降低复杂度[17];而凸凹优化的免SVD迭代仅需主成分计算[21]。这些成果为端到端训练提供了可微分的、可学习的子空间近端映射设计思路。
3. 方法
A. 符号与问题设定
令 X ∈ R<sup>3×N</sup> 表示RGB观测图像,Y ∈ R<sup>B×N</sup> 表示目标高光谱图像(N个像素,B个波段)。前向算子 Φ 遵循公式(1)。分析-合成变换分别为 T<sub>θ</sub> : R<sup>B×N</sup> → R<sup>d×n</sup> 和 T<sub>θ</sub><sup>†</sup> : R<sup>d×n</sup> → R<sup>B×N</sup>,主要沿光谱维度进行操作。d表示变换特征维度,n表示向量化空间尺寸,r ≪ min{d, n} 表示目标子空间秩。
我们通过正则化逆问题恢复Y:
Ŷ = arg min<sub>Y ∈ R<sup>B×N</sup></sub> ½∥ΦY − X∥<sub>F</sub><sup>2</sup> + λ∥T<sub>θ</sub>(Y)∥<sub>∗</sub> (2)
B. 展开架构
Φ 由网络估计并在各阶段共享。步长 η<sub>k</sub> > 0 用于稳定梯度更新。分析算子 T<sub>θ</sub> 转换高光谱图像的域。LRSP(·; τ<sub>k</sub>) 表示具有温度调度 τ<sub>k</sub> 的可学习低秩子空间近端算子。合成算子 T<sub>θ</sub><sup>†</sup> 将其转换回原始域。模块 M 维护记忆状态 Z<sub>k</sub> 以提供粗略光谱上下文。USCTNet的具体算法流程如下:
算法1 USCTNet:包含K个展开阶段的前向传播
输入: RGB图像X,阶段数K,步长{η<sub>k</sub> > 0},记忆Z<sub>0</sub>,初始化Y<sub>0</sub>
1: Φ ← PhiNet(X) ▷ 阶段共享的前向算子
2: for k = 1, ..., K do
3: R<sub>k</sub> ← Y<sub>k-1</sub> − η<sub>k</sub>Φ<sup>⊤</sup>(ΦY<sub>k-1</sub> − X) ▷ 物理引导的梯度下降步
4: U<sub>k</sub> ← T<sub>θ</sub>(R<sub>k</sub>; Z<sub>k-1</sub>)
5: Û<sub>k</sub> ← LRSP(U<sub>k</sub>; τ<sub>k</sub>) ▷ 低秩子空间近端操作
6: Y<sub>k</sub> ← T<sub>θ</sub><sup>†</sup>(Û<sub>k</sub>)
7: Z<sub>k</sub> ← M(Z<sub>k-1</sub>, U<sub>k</sub>) ▷ 跨阶段记忆更新
8: end for
9: return Y<sub>K</sub>
C. 低秩子空间近端映射
我们设计了一个可学习的近端算子来执行子空间奇异值阈值法,以避免全尺寸奇异值分解。在第k阶段,输入为 U<sub>k</sub> ∈ R<sup>d×n</sup>。r ≪ min{d, n} 是目标秩,T是内部迭代次数,κ是列预算,s是高斯探针数量。以下描述阶段k内的单次内部迭代t。
(i) 可微分选择与草图:通过门控卷积和列池化计算非负重要性 g ∈ (0, 1)<sup>n</sup>。通过 f<sub>emb</sub> : R<sup>d</sup> → R<sup>m</sup> 嵌入每列,并用查询向量 q ∈ R<sup>m</sup> 评分:
s<sub>i</sub> = ⟨f<sub>emb</sub>(U<sub>k</sub>[:, i]), q⟩, š<sub>i</sub> = (s<sub>i</sub> − s<sub>(κ+1)</sub>)/τ<sub>t</sub>, (3)
其中 s<sub>(κ+1)</sub> 使用停止梯度,τ<sub>t</sub> > 0 是温度参数。软Top-κ权重为:
SoftTop<sub>κ</sub>(s; τ<sub>t</sub>)<sub>i</sub> = softplus(š<sub>i</sub>) / Σ<sub>j</sub> softplus(š<sub>j</sub>). (4)
定义选择器 Ω<sub>t</sub> = Diag(g) SoftTop<sub>κ</sub>(s; τ<sub>t</sub>) ∈ R<sup>n×κ</sup> 和标准正交子空间:
Q<sub>t</sub> = orth(U<sub>k</sub>Ω<sub>t</sub>) ∈ R<sup>d×r</sup>. (5)
(ii) 自适应探测与阈值调度:使用 Ξ ∼ N(0, 1)<sup>n×s</sup> 和 G = Diag(g)Ξ,估计残差比率(作为公式10中的融合权重):
ρ̃<sub>t</sub> = ∥(I − Q<sub>t</sub>Q<sub>t</sub><sup>⊤</sup>)U<sub>k</sub>G∥<sub>F</sub> / (∥U<sub>k</sub>G∥<sub>F</sub> + ε) ∈ (0, 1). (6)
使用轻量级MLP进行细化并预测阈值增量:
(ρ̂<sub>t</sub>, Δβ<sub>t</sub>) = MLP<sub>η</sub>([SparsePool(U<sub>k</sub>; Ω<sub>t</sub>), ρ̃<sub>t</sub>]), (7)
其中 SparsePool(U<sub>k</sub>; Ω<sub>t</sub>) = Σ<sub>i=1</sub><sup>n</sup> Ω<sub>t</sub>(i) U<sub>k</sub>[:, i] ∈ R<sup>d</sup>。
使用指数调度与累积软阈值:
τ<sub>t</sub> = max(τ<sub>min</sub>, τ<sub>0</sub>γ<sup>t-1</sup>), β<sub>t+1</sub> = β<sub>t</sub> + Δβ<sub>t</sub>, β<sub>1</sub> > 0. (8)
(iii) 子空间近端与融合:在迭代t时,将U<sub>k</sub>投影到Q<sub>t</sub>张成的子空间(公式5)形成紧凑矩阵B<sub>t</sub>。随后应用深度可分离模块ConvSVT<sub>ψ</sub>(·)作为奇异值收缩的数据自适应替代。其输出通过门控α<sub>t</sub> = σ(β<sub>t</sub>) ∈ (0, 1)与恒等映射结合,其中β<sub>t</sub>为阈值增量(公式8)。最终结果映射回原空间:
B̂<sub>t</sub> = (1 − α<sub>t</sub>)B<sub>t</sub> + α<sub>t</sub>ConvSVT<sub>ψ</sub>(B<sub>t</sub>), Û<sub>k,t</sub> = Q<sub>t</sub>B̂<sub>t</sub>. (9)
使用残差感知软权重融合提案:
w<sub>t</sub> = exp(−νρ̂<sub>t</sub>) / Σ<sub>s=1</sub><sup>T</sup> exp(−νρ̂<sub>s</sub>), ν > 0, Û<sub>k</sub> = Σ<sub>t=1</sub><sup>T</sup> w<sub>t</sub>Û<sub>k,t</sub>. (10)
复杂度与可微性:每内部步骤:子空间草图O(dn);orth(·)至秩r:O(dr²);投影O(dnr);r×n矩阵的薄奇异值分解O(r²n)。总体复杂度O(dnr + r²n),其中r ≪ n,避免全奇异值分解O(dn min{d, n})。所有组件可微:含τ<sub>t</sub>的softplus松弛Top-κ选择,奇异值分解反向传播遵循标准自动微分与软收缩。
D. 算法网络实现
采用[1]架构预测前向算子Φ(称为PhiNet)。PhiNet经过预训练,在主网络训练期间保持冻结以避免联合优化不稳定。为防止实验数据泄露,使用与第4节相同的数据集训练分割训练PhiNet。外层分支用[8]的编码器-解码器替代传统分析-合成变换(T<sub>θ</sub>–T<sub>θ</sub><sup>†</sup>),并针对高光谱数据定制以增强跨波段表示。为进一步提升稳定性,在输入输出端插入卷积引导通道注意力模块(CAB;见图1D),Transformer层配备双残差变换块(DRTB;见图1C)以抑制高维特征梯度振荡。这些模块与LRSP共同构成LRSPB(见图1B)。最后,通过拼接操作与卷积层学习辅助迭代更新项M。主网络采用ℓ<sub>1</sub>重建损失进行端到端训练。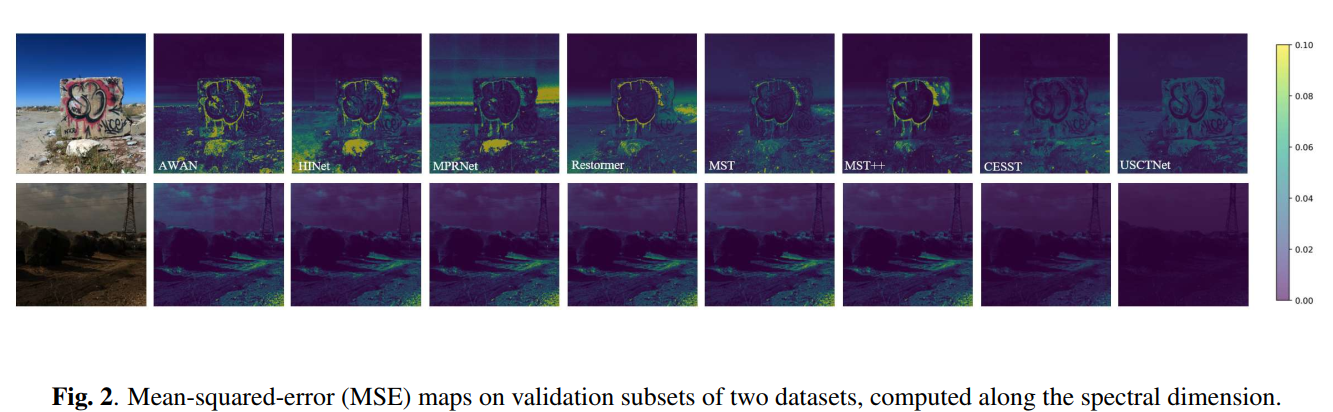
4. 实验与结果
实施细节:我们使用PyTorch实现模型。输入归一化至[0,1]并裁剪为128×128图像块(步长为8)。数据增强包括随机翻转与旋转。采用Adam优化器(初始学习率10<sup>-5</sup>,β<sub>1</sub>=0.9,β<sub>2</sub>=0.999)和余弦退火策略训练300轮,批次大小为8。所有实验在NVIDIA A100(40GB)上完成。
数据集:在ARAD-1K Real [9]和ICVL [10]上评估USCTNet。由于ICVL缺乏配对RGB图像,我们依据[11]方法合成RGB。移除18张分辨率不一致图像后,得到153个训练样本和30个测试样本。
定量结果:采用PSNR、SSIM和SAM指标与当前最优方法对比。如表1所示,USCTNet取得最佳综合精度。
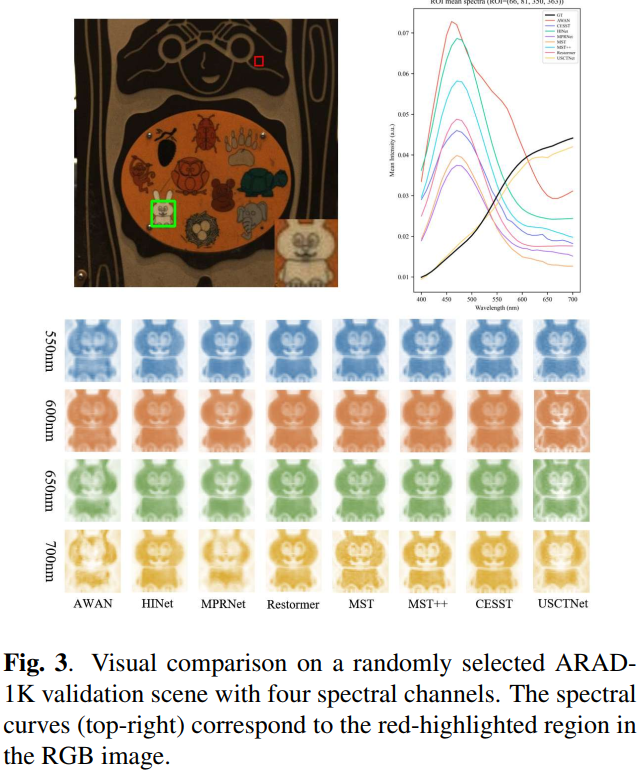
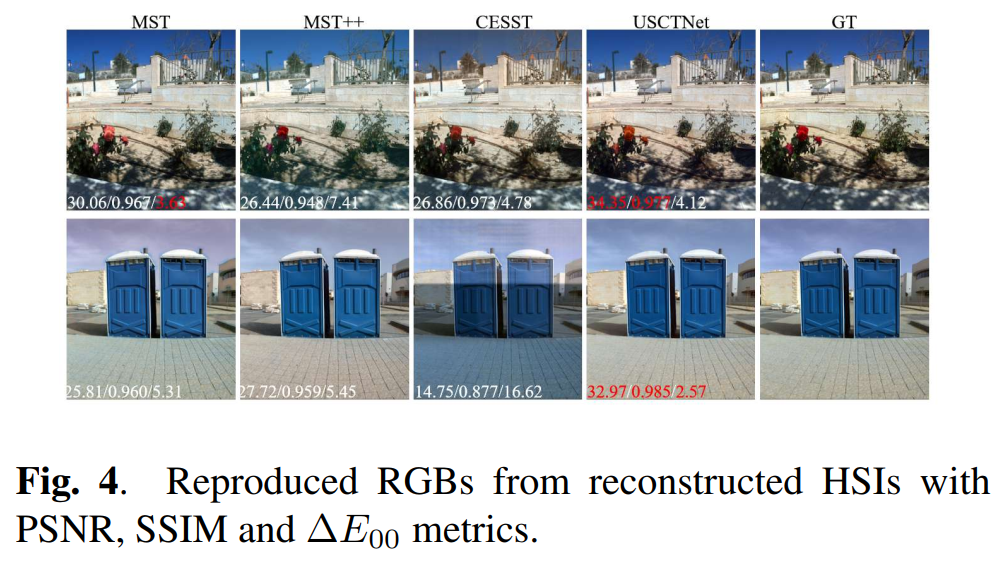
定性结果:图2展示了跨波段均方误差图的可视化结果。图3呈现550、600、650及700nm波长的重建效果,USCTNet在保持光谱一致性的同时恢复了更精细的空间细节。图4对比RGB重建效果,同时通过ΔE<sub>00</sub>指标评估色彩差异一致性。我们的输出与真实值高度吻合,在获得高PSNR/SSIM的同时保持较低ΔE<sub>00</sub>,表明其具备强物理一致性。
消融实验:我们在ARAD-1K Real数据集上评估梯度下降/近端设计(GD+prox)、CAB、DRTB和LRSP的贡献(表2),以MST++为基线。由于全SVD计算成本高、梯度噪声增大及高维奇异值谱数值不稳定,直接集成原始SVT反而降低精度。LRSP通过在低维子空间进行可学习软阈值处理,显式控制有效秩并平滑梯度流,在相同设置下显著提升指标。
表2. 核心模块消融研究(指标对比表格)
我们还对展开迭代次数k进行消融实验:当k<3时模型不收敛,k≥5时过拟合。虽然k=4相比k=3仅带来边际提升却显著增加参数量,最终选择k=3以平衡收敛性、泛化能力与复杂度。
5. 结论
本文提出USCTNet——一个基于物理建模的RGB至HSI重建框架,有效协调了光谱精度与RGB保真度。通过两个核心组件整合成像物理与结构先验:(1)显式估计相机光谱灵敏度与光照参数,结合梯度下降数据保真度更新实现色彩一致性重建;(2)低秩子空间近端算子,通过高效子空间SVT施加核范数先验,提升梯度稳定性与可扩展性。该框架通过可学习变换域中的展开求解器实现,在标准基准测试中达到当前最优性能,显著减少RGB-HSI失配误差。通过融合数据驱动建模与物理原理,为遥感与计算摄影领域的可靠光谱重建奠定了理论基础。