ORB_SLAM2原理及代码解析:单应矩阵H、基础矩阵F求解
目录
1 单应矩阵
1.1 作用
1.2 参数及含义
1.3 逻辑关系
1.4 代码
1.5 解析
1.5.1 准备阶段
1.5.1.1 T矩阵说明
1.5.1.2 Normalize() 函数说明,找到T矩阵
1.5.2 初始化变量
1.5.3 RANSAC 主循环
1.5.3.1 CheckHomography() 函数
2 基础矩阵
2.1 参数及含义
2.2 代码
2.3 解析
2.3.1 初始化及归一化
2.3.2 初始化结果和临时变量
2.3.3 RANSAC循环
为保证求解的可靠性,代码中求解与定义式有较大出入,详见如下。
1 单应矩阵
1.1 作用
计算单应矩阵H。
1.2 参数及含义

1.3 逻辑关系
mvKeys1, mvKeys2 (去畸变关键点)
↓
mvMatches12 (匹配点索引集合)
↓
vPn1, vPn2(归一化后匹配点集合) ← Normalize() → T1, T2
↓
RANSAC循环 (mMaxIterations次)
├─ 从 mvSets[it] 抽取 8 对匹配点
├─ ComputeH21(vPn1i, vPn2i) → Hn
├─ 反归一化: H21i = T2inv * Hn * T1
├─ H12i = H21i.inv()
├─ CheckHomography() → currentScore, vbCurrentInliers
└─ 若得分更高 → 更新 H21, vbMatchesInliers, score
1.4 代码
void Initializer::FindHomography(vector<bool> &vbMatchesInliers, float &score, cv::Mat &H21) {// Number of putative matchesconst int N = mvMatches12.size();// Normalize coordinatesvector<cv::Point2f> vPn1, vPn2;cv::Mat T1, T2;Normalize(mvKeys1,vPn1, T1);Normalize(mvKeys2,vPn2, T2);cv::Mat T2inv = T2.inv();// Best Results variablesscore = 0.0;vbMatchesInliers = vector<bool>(N,false);// Iteration variablesvector<cv::Point2f> vPn1i(8);vector<cv::Point2f> vPn2i(8);cv::Mat H21i, H12i;vector<bool> vbCurrentInliers(N,false);float currentScore;// Perform all RANSAC iterations and save the solution with highest scorefor(int it=0; it<mMaxIterations; it++){// Select a minimum setfor(size_t j=0; j<8; j++){int idx = mvSets[it][j];vPn1i[j] = vPn1[mvMatches12[idx].first];vPn2i[j] = vPn2[mvMatches12[idx].second];}cv::Mat Hn = ComputeH21(vPn1i,vPn2i);H21i = T2inv*Hn*T1;H12i = H21i.inv();currentScore = CheckHomography(H21i, H12i, vbCurrentInliers, mSigma);if(currentScore>score){H21 = H21i.clone();vbMatchesInliers = vbCurrentInliers;score = currentScore;}} }
1.5 解析
1.5.1 准备阶段
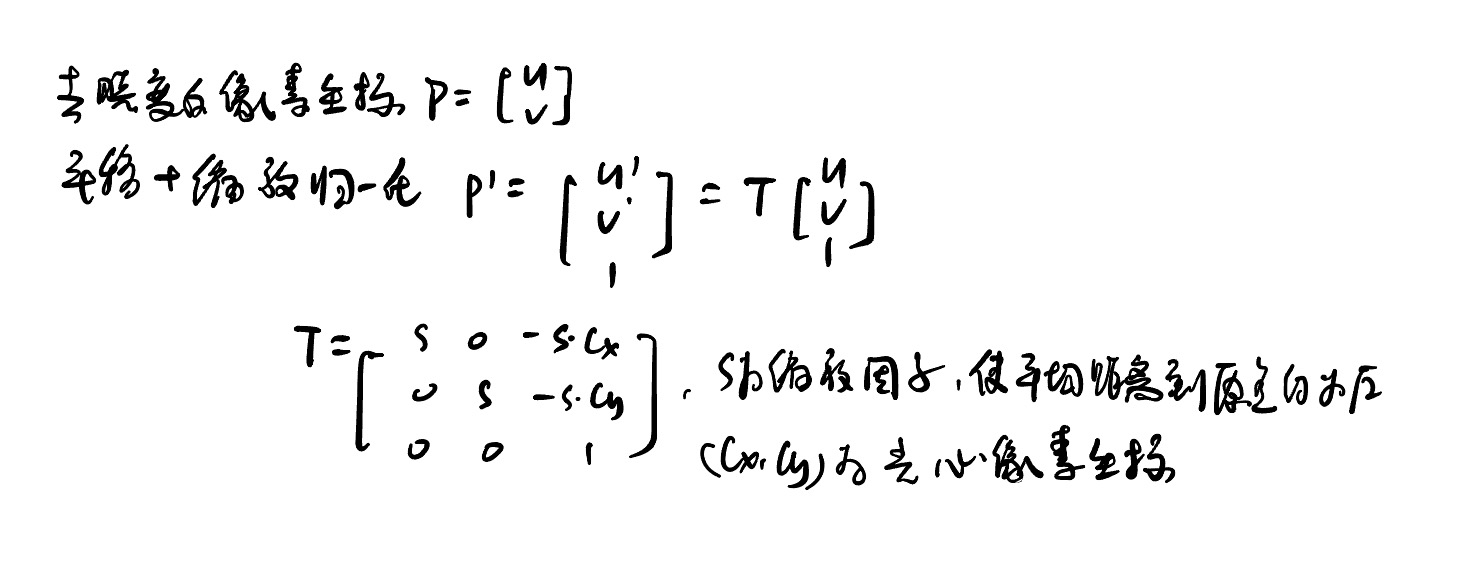
// Number of putative matchesconst int N = mvMatches12.size();// Normalize coordinates//存储参考帧(Frame 1)、当前帧F2的归一化关键点坐标vector<cv::Point2f> vPn1, vPn2;//T1,T2为后续平移+缩放归一化用(与相机内参归一化区分),详见下图cv::Mat T1, T2;//将帧1、2特征点归一化Normalize(mvKeys1,vPn1, T1);Normalize(mvKeys2,vPn2, T2);//求T2的逆cv::Mat T2inv = T2.inv();
1.5.1.1 T矩阵说明
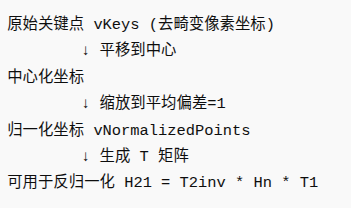
1.5.1.2 Normalize() 函数说明,找到T矩阵
void Initializer::Normalize(const vector<cv::KeyPoint> &vKeys, vector<cv::Point2f> &vNormalizedPoints, cv::Mat &T) {//计算关键点的质心float meanX = 0;float meanY = 0;const int N = vKeys.size();vNormalizedPoints.resize(N);for(int i=0; i<N; i++){meanX += vKeys[i].pt.x;meanY += vKeys[i].pt.y;}meanX = meanX/N;meanY = meanY/N;//每个关键点减去质心,得到中心化后的坐标float meanDevX = 0;float meanDevY = 0;for(int i=0; i<N; i++){vNormalizedPoints[i].x = vKeys[i].pt.x - meanX;vNormalizedPoints[i].y = vKeys[i].pt.y - meanY;//计算每个方向的平均绝对偏差,确定缩放因子smeanDevX += fabs(vNormalizedPoints[i].x);meanDevY += fabs(vNormalizedPoints[i].y);}//缩放关键点,使平均偏差 = 1,平衡 x、y 方向尺度,数值稳定性更好meanDevX = meanDevX/N;meanDevY = meanDevY/N;float sX = 1.0/meanDevX;float sY = 1.0/meanDevY;for(int i=0; i<N; i++){vNormalizedPoints[i].x = vNormalizedPoints[i].x * sX;vNormalizedPoints[i].y = vNormalizedPoints[i].y * sY;}//构建归一化矩阵 TT = cv::Mat::eye(3,3,CV_32F);T.at<float>(0,0) = sX;T.at<float>(1,1) = sY;T.at<float>(0,2) = -meanX*sX;T.at<float>(1,2) = -meanY*sY; }思路:
1.5.2 初始化变量
// Best Results variablesscore = 0.0;//初始化内点标记数组,N个点现在都是外点vbMatchesInliers = vector<bool>(N,false);// Iteration variables//为 RANSAC 的最小点集准备存储空间vector<cv::Point2f> vPn1i(8);vector<cv::Point2f> vPn2i(8);//H21i:存储当前迭代下,从参考帧(Frame1)到当前帧(Frame2)的候选单应矩阵//H12i:H21i的逆cv::Mat H21i, H12i;vector<bool> vbCurrentInliers(N,false);float currentScore;
1.5.3 RANSAC 主循环
// Perform all RANSAC iterations and save the solution with highest scorefor(int it=0; it<mMaxIterations; it++){// Select a minimum setfor(size_t j=0; j<8; j++){int idx = mvSets[it][j];vPn1i[j] = vPn1[mvMatches12[idx].first];vPn2i[j] = vPn2[mvMatches12[idx].second];}cv::Mat Hn = ComputeH21(vPn1i,vPn2i);H21i = T2inv*Hn*T1;H12i = H21i.inv();currentScore = CheckHomography(H21i, H12i, vbCurrentInliers, mSigma);if(currentScore>score){H21 = H21i.clone();vbMatchesInliers = vbCurrentInliers;score = currentScore;}}
1.5.3.1 CheckHomography() 函数
(1)作用
用于评估给定单应矩阵 H21(Frame1 → Frame2)是否正确,通过检查匹配点的重投影误差,计算一个评分,并标记每个匹配点是否为内点。
(2)代码
float Initializer::CheckHomography(const cv::Mat &H21, const cv::Mat &H12, vector<bool> &vbMatchesInliers, float sigma) { const int N = mvMatches12.size();const float h11 = H21.at<float>(0,0);const float h12 = H21.at<float>(0,1);const float h13 = H21.at<float>(0,2);const float h21 = H21.at<float>(1,0);const float h22 = H21.at<float>(1,1);const float h23 = H21.at<float>(1,2);const float h31 = H21.at<float>(2,0);const float h32 = H21.at<float>(2,1);const float h33 = H21.at<float>(2,2);const float h11inv = H12.at<float>(0,0);const float h12inv = H12.at<float>(0,1);const float h13inv = H12.at<float>(0,2);const float h21inv = H12.at<float>(1,0);const float h22inv = H12.at<float>(1,1);const float h23inv = H12.at<float>(1,2);const float h31inv = H12.at<float>(2,0);const float h32inv = H12.at<float>(2,1);const float h33inv = H12.at<float>(2,2);vbMatchesInliers.resize(N);float score = 0;const float th = 5.991;const float invSigmaSquare = 1.0/(sigma*sigma);for(int i=0; i<N; i++){bool bIn = true;const cv::KeyPoint &kp1 = mvKeys1[mvMatches12[i].first];const cv::KeyPoint &kp2 = mvKeys2[mvMatches12[i].second];const float u1 = kp1.pt.x;const float v1 = kp1.pt.y;const float u2 = kp2.pt.x;const float v2 = kp2.pt.y;// Reprojection error in first image// x2in1 = H12*x2const float w2in1inv = 1.0/(h31inv*u2+h32inv*v2+h33inv);const float u2in1 = (h11inv*u2+h12inv*v2+h13inv)*w2in1inv;const float v2in1 = (h21inv*u2+h22inv*v2+h23inv)*w2in1inv;const float squareDist1 = (u1-u2in1)*(u1-u2in1)+(v1-v2in1)*(v1-v2in1);const float chiSquare1 = squareDist1*invSigmaSquare;if(chiSquare1>th)bIn = false;elsescore += th - chiSquare1;// Reprojection error in second image// x1in2 = H21*x1const float w1in2inv = 1.0/(h31*u1+h32*v1+h33);const float u1in2 = (h11*u1+h12*v1+h13)*w1in2inv;const float v1in2 = (h21*u1+h22*v1+h23)*w1in2inv;const float squareDist2 = (u2-u1in2)*(u2-u1in2)+(v2-v1in2)*(v2-v1in2);const float chiSquare2 = squareDist2*invSigmaSquare;if(chiSquare2>th)bIn = false;elsescore += th - chiSquare2;if(bIn)vbMatchesInliers[i]=true;elsevbMatchesInliers[i]=false;}return score; }
2 基础矩阵
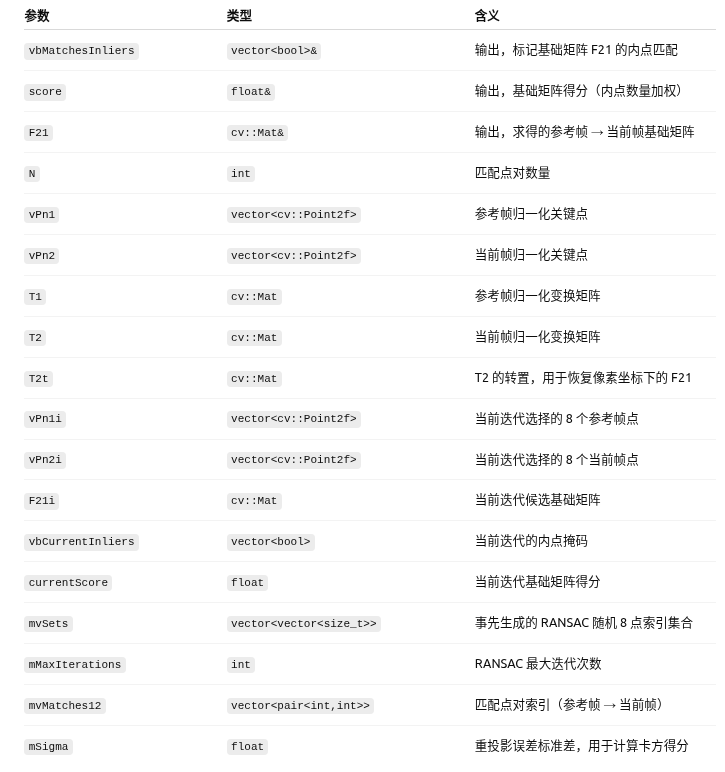
2.1 参数及含义
2.2 代码
void Initializer::FindFundamental(vector<bool> &vbMatchesInliers, float &score, cv::Mat &F21) {// Number of putative matchesconst int N = vbMatchesInliers.size();// Normalize coordinatesvector<cv::Point2f> vPn1, vPn2;cv::Mat T1, T2;Normalize(mvKeys1,vPn1, T1);Normalize(mvKeys2,vPn2, T2);cv::Mat T2t = T2.t();// Best Results variablesscore = 0.0;vbMatchesInliers = vector<bool>(N,false);// Iteration variablesvector<cv::Point2f> vPn1i(8);vector<cv::Point2f> vPn2i(8);cv::Mat F21i;vector<bool> vbCurrentInliers(N,false);float currentScore;// Perform all RANSAC iterations and save the solution with highest scorefor(int it=0; it<mMaxIterations; it++){// Select a minimum setfor(int j=0; j<8; j++){int idx = mvSets[it][j];vPn1i[j] = vPn1[mvMatches12[idx].first];vPn2i[j] = vPn2[mvMatches12[idx].second];}cv::Mat Fn = ComputeF21(vPn1i,vPn2i);F21i = T2t*Fn*T1;currentScore = CheckFundamental(F21i, vbCurrentInliers, mSigma);if(currentScore>score){F21 = F21i.clone();vbMatchesInliers = vbCurrentInliers;score = currentScore;}} }
2.3 解析
2.3.1 初始化及归一化
// Number of putative matchesconst int N = vbMatchesInliers.size();// Normalize coordinatesvector<cv::Point2f> vPn1, vPn2;cv::Mat T1, T2;Normalize(mvKeys1,vPn1, T1);Normalize(mvKeys2,vPn2, T2);cv::Mat T2t = T2.t();
2.3.2 初始化结果和临时变量
// Best Results variablesscore = 0.0;vbMatchesInliers = vector<bool>(N,false);// Iteration variablesvector<cv::Point2f> vPn1i(8);vector<cv::Point2f> vPn2i(8);cv::Mat F21i;vector<bool> vbCurrentInliers(N,false);float currentScore;
2.3.3 RANSAC循环
// Perform all RANSAC iterations and save the solution with highest scorefor(int it=0; it<mMaxIterations; it++){// Select a minimum setfor(int j=0; j<8; j++){int idx = mvSets[it][j];vPn1i[j] = vPn1[mvMatches12[idx].first];vPn2i[j] = vPn2[mvMatches12[idx].second];}cv::Mat Fn = ComputeF21(vPn1i,vPn2i);F21i = T2t*Fn*T1;currentScore = CheckFundamental(F21i, vbCurrentInliers, mSigma);if(currentScore>score){F21 = F21i.clone();vbMatchesInliers = vbCurrentInliers;score = currentScore;}}