自动驾驶中的传感器技术62——USS(8)
本文对超声波雷达的一些补充知识点进行论述
1、UPA和APA
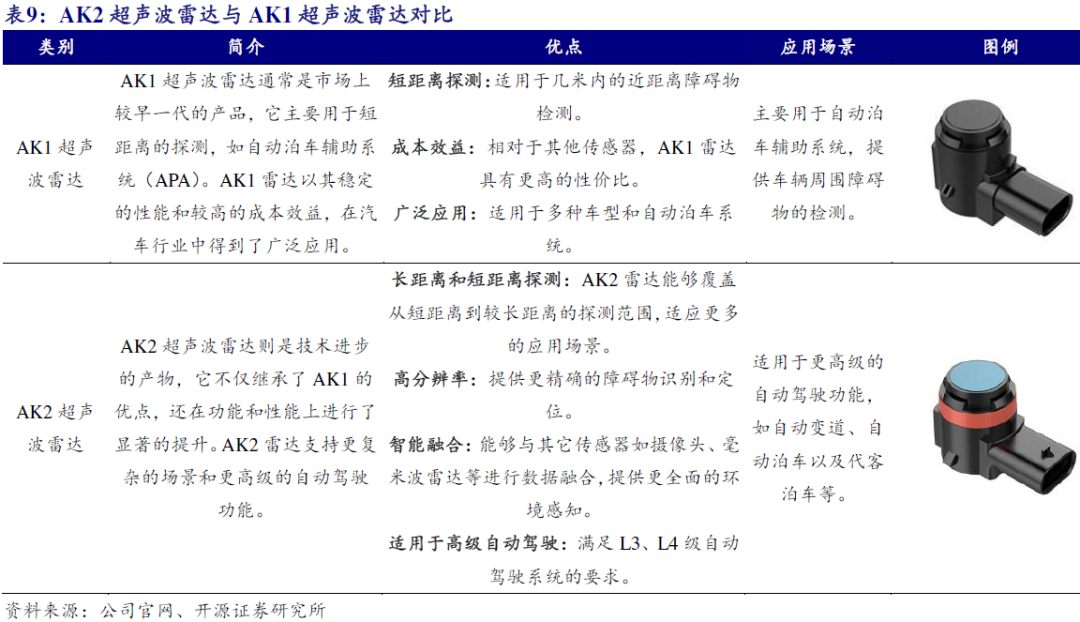
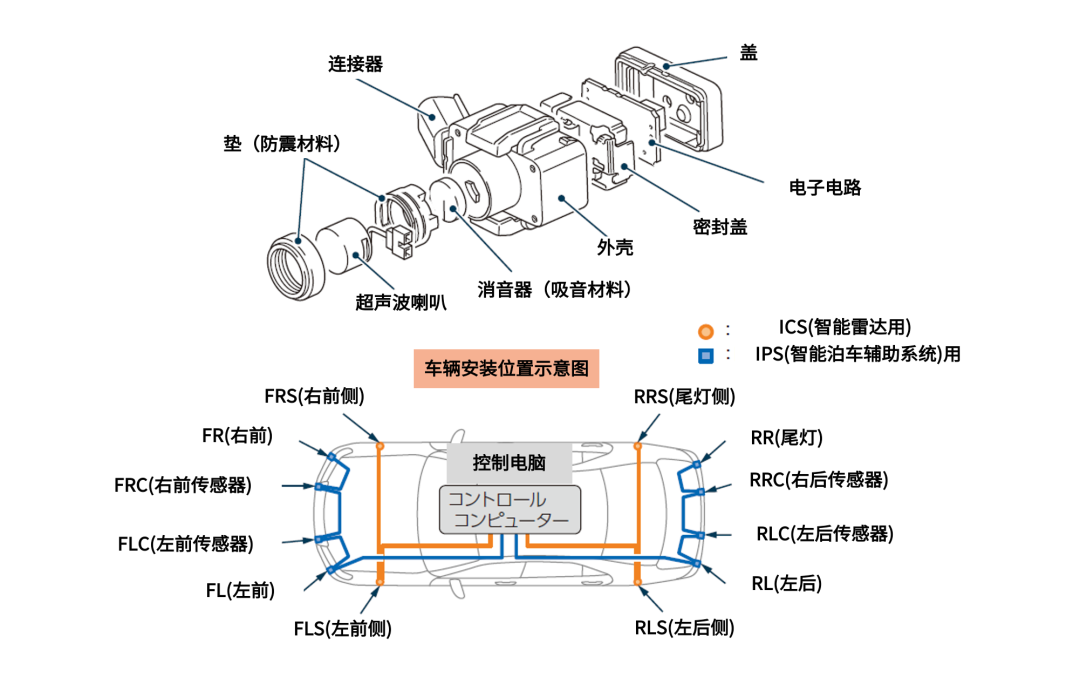
AK1和AK2 USS均可用于UPA或者APA,目前主流方式是APA,使用AK2 USS;只是在习惯上,称车头车尾的8个USS为UPA,车身侧的4个USS为APA。
超声波雷达最初在汽车上主要应用为UPA(Ultrasonic Parking Assist),也就是我们平时听懂“嘟嘟”声音的倒车雷达。现在,则发展到了更高级的APA(Automated Parking Assist)的发展阶段。二者虽然在雷达结构上具有一定相似性,但在系统架构、功能逻辑、传感融合和智能控制等方面存在本质差异。
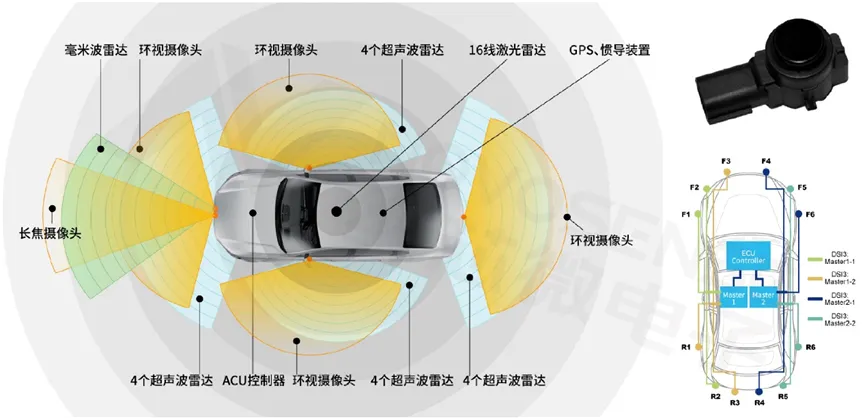
APA架构数据不再孤立处理,通过中央控制器统一调度,帮助完成泊车任务。为了确保APA在各种车位环境(如斜列、窄位、障碍靠边)下正常运行,系统需具备较强的鲁棒性和抗干扰能力,涉及动态阈值调整、干扰波识别、历史轨迹回溯等算法模块。在APA系统中雷达布局如下:
-
前保险杠:4颗(中部2颗 + 两角各1颗)
-
后保险杠:4颗(中部2颗 + 两角各1颗)
-
左右两侧裙边:各2颗

在APA中,超声波雷达通常采用“探头(Slave)-主芯片(Master)-域控(ECU/VCU)”的三级架构:底层的Slave探头负责发射超声波并接收回波,通过主线连接至中层的Master芯片(一个Master芯片支持6个Slave探头,12个需要配备两个Master芯片),最终两颗Master芯片再连接到域控。
使用超声波雷达支持自动泊车功能也存在一些挑战:
-
第一,泊车时,如果相互接近两辆车都具有主动超声波传感器,则信号可能相互反弹,每辆车都可能读取错误的超声波,该问题目前可通过智能信号编码或将唯一的频率标识符集成到每个发射波中得到解决;
-
第二,是传输距离问题,分为远距离和近距离两个场景:远距离方面,过去多为2.5~3米,如今AK2探头可达到4.5~5.5米,但市场探测需求达到了6~7米;近距离方面,障碍物处于15厘米以内时,仅能提示存在障碍物,却无法精准播报具体距离,因此,还需进一步压缩盲区范围,力争实现10厘米以内乃至更近距离的精准测距,以此提升泊车精度,减少车辆刮蹭的情况;
-
第三,扫描效率和多发多收能力不足,抗干扰能力薄弱,稳定性待提升;
-
第四,随着大数据与端到端算法的普及,系统对原始数据的需求不断增加,这要求传感器不再只输出初步判断结论,而是提供包络数据、ADC采样数据等更丰富的原始数据,以支撑上层域控开展深度学习与判断;
-
第五,互联互通问题。由于不同厂家的芯片之间缺乏统一标准,Master与Slave之间的互联互通受到限制,这既不利于供应链保持灵活性,也给客户自主调整配置带来不便,因此OEM更倾向于选择可随意搭配、切换的方案。
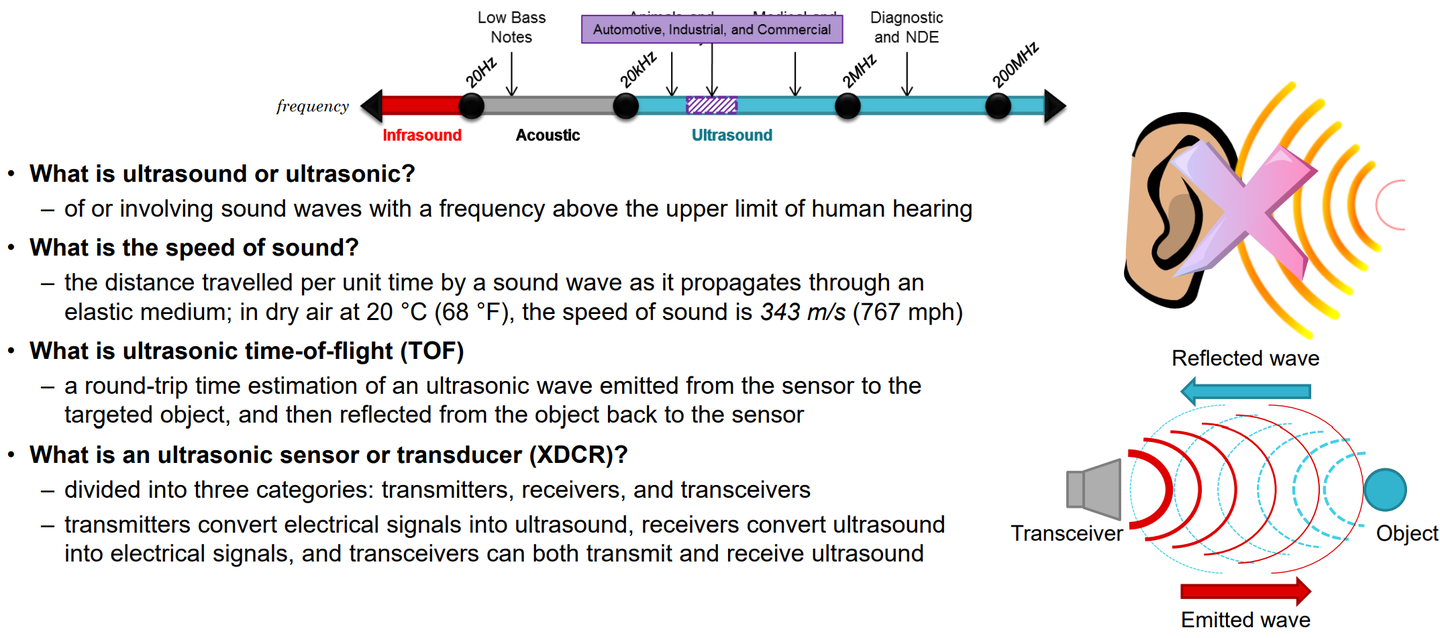
2、超声波说明
Ref:https://www.ti.com/content/dam/videos/external-videos/en-us/4/3816841626001/6073618452001.mp4/subassets/08_design_guide_for_ti_ultra_sonic_sensor_20190417_0.pdf
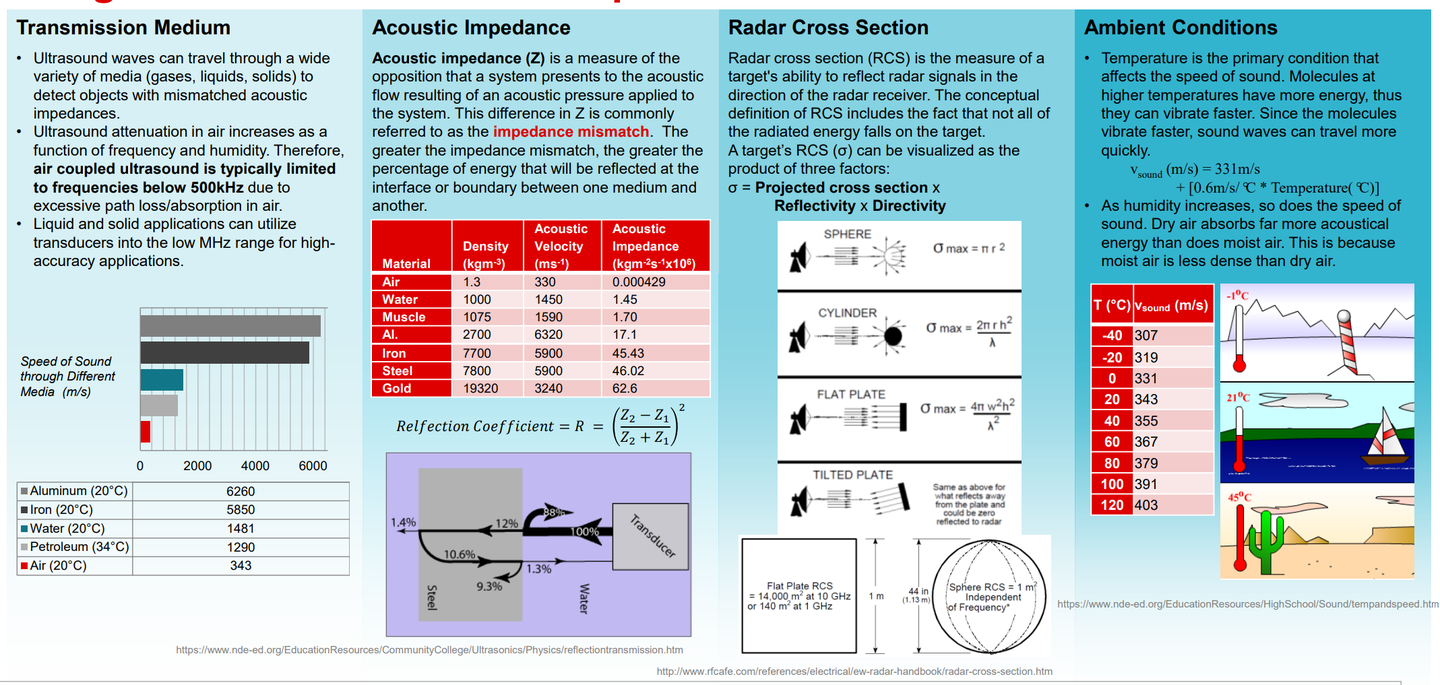
3、超声波模块特性说明
4、超声波模块频率和方向性
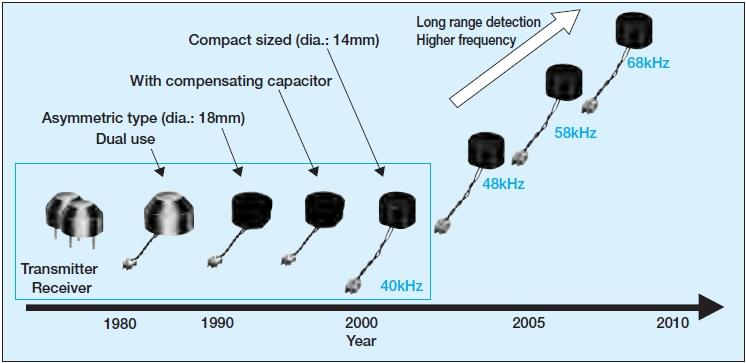
超声波传感器的方向性与振动表面(发射超声波的表面)的尺寸和形状以及振动频率相对应。尺寸相同时,频率越高,指向性越窄;频率相同时,尺寸越大,指向性越窄。下图显示了相同尺寸下不同频率下探测距离的差异。
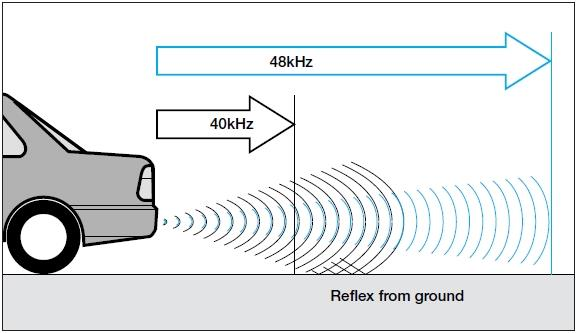
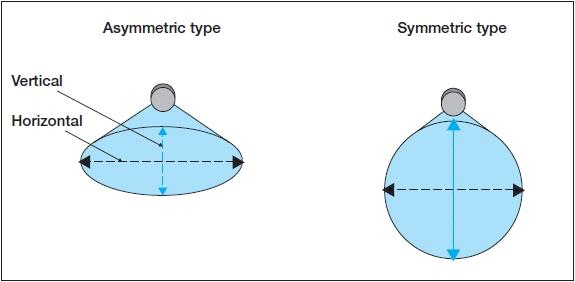
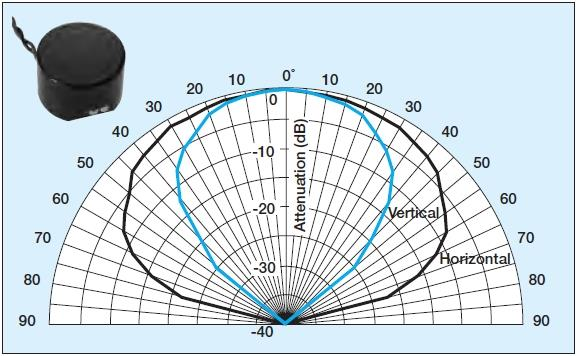
通过使用更高的频率并选择合适的放大器(增益),我们可以增强地面物体(例如车轮挡块)的影响。较窄的垂直方向性可以提高传感器的可用性,而较宽的水平方向性可以用更少的传感器提供更广的覆盖范围。在这种情况下,可以使用“非对称”超声波传感器。
由于后置声纳超声波传感器同时处理超声波的发送和接收,因此,除非发射的声波消散且没有快速振荡,否则它无法开始接收其反射。振荡时间越短,检测范围就越近。
村田制作所的超声波传感器外壳兼作超声波发射器,经过精密制造,可与驱动频率产生共振。这正是其高灵敏度和声压的原因。
Ref:https://www.newelectronics.co.uk/content/features/an-introduction-to-ultrasonic-sensors-for-vehicle-parking/
5、超声换能器内部
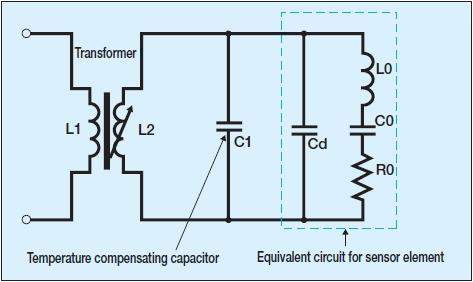
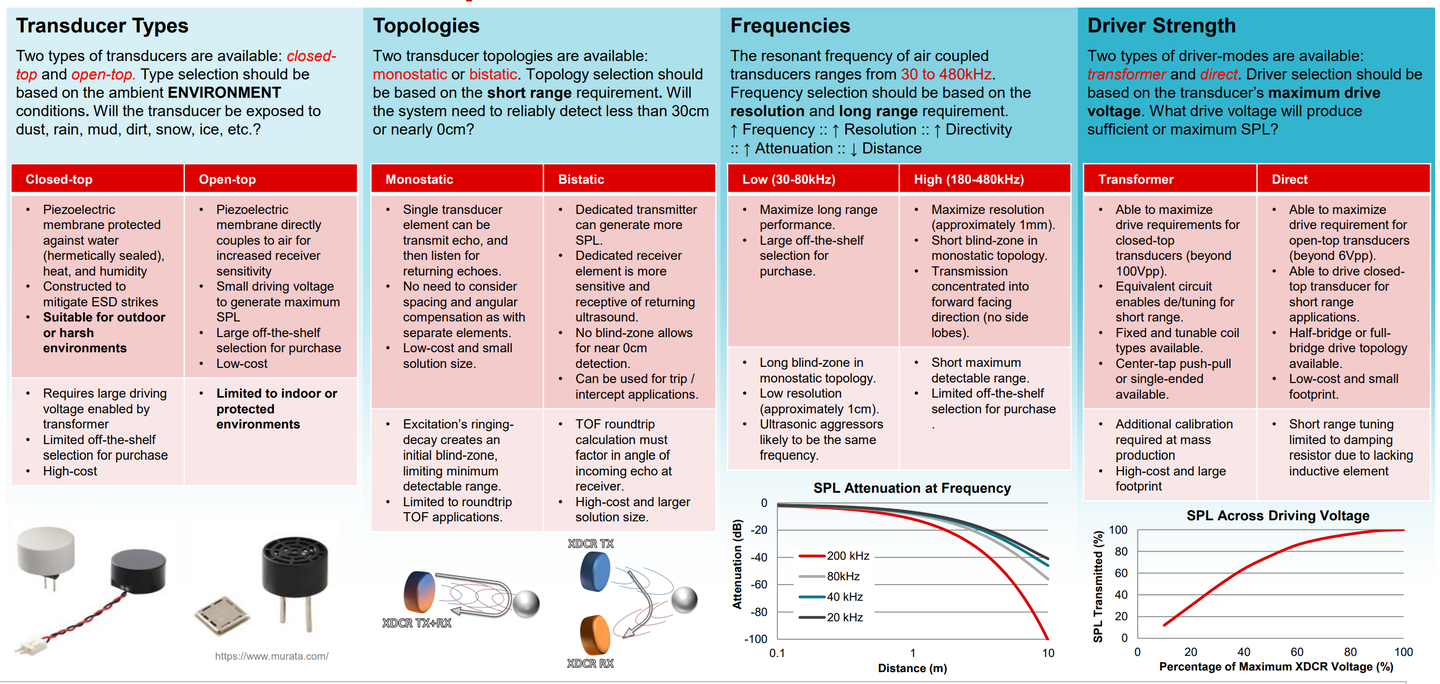
由于车载超声传感器必须防水,因此其灵敏度低于室内使用的传感器。因此,必须使用变压器将传感器的驱动电压提高到70至100V,才能发射更强的超声波。
传感器侧的变压器电感充当LC并联谐振电路的组成部分,以减少接收时的振铃。变压器电感由1/[(2wf) 2 C]得出,其中f为谐振频率。由于升压比和匝数分别由驱动电压和电感决定,因此变压器的设计非常简单。
然而,由于压电材料的温度特性以及压电元件与外壳之间的热膨胀系数差异,传感器电容会随着温度变化而发生较大波动。村田制作所通过在压电元件上并联一个具有相反温度特性的电容器(温度补偿电容器),最大限度地降低了这种随温度变化的电容波动。
这使得在较宽的温度范围内具有短暂且稳定的振铃特性。该技术对于能够检测约10cm近距离物体的系统至关重要。
Ref:https://www.newelectronics.co.uk/content/features/an-introduction-to-ultrasonic-sensors-for-vehicle-parking/
6、超声波雷达图解
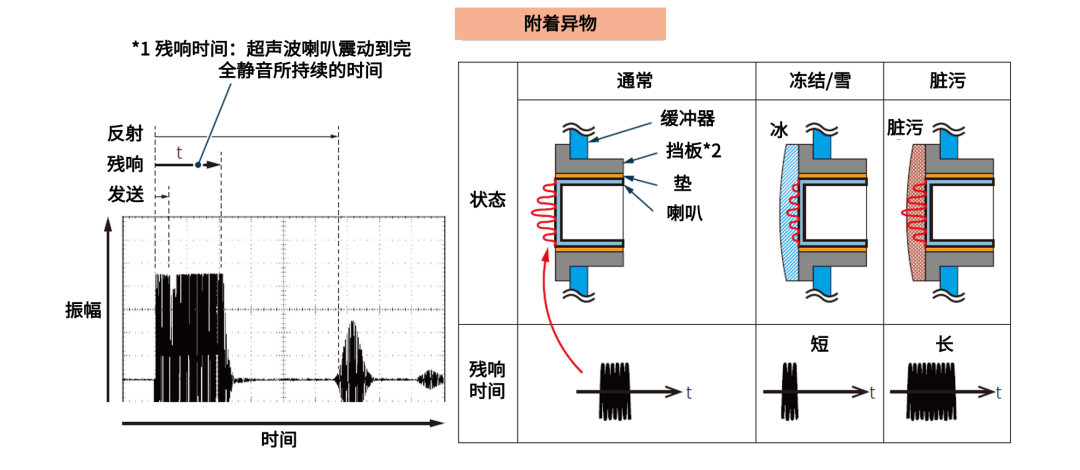
下文中的材料可以减少残响的影响
Ref:https://www.henkel-adhesives.com/ro/en/applications/all-applications/product-application/potting-ultrasonic-parking-distance-sensors.html
7、elmos的技术特点
Elmos芯片在智能泊车辅助系统中的作用
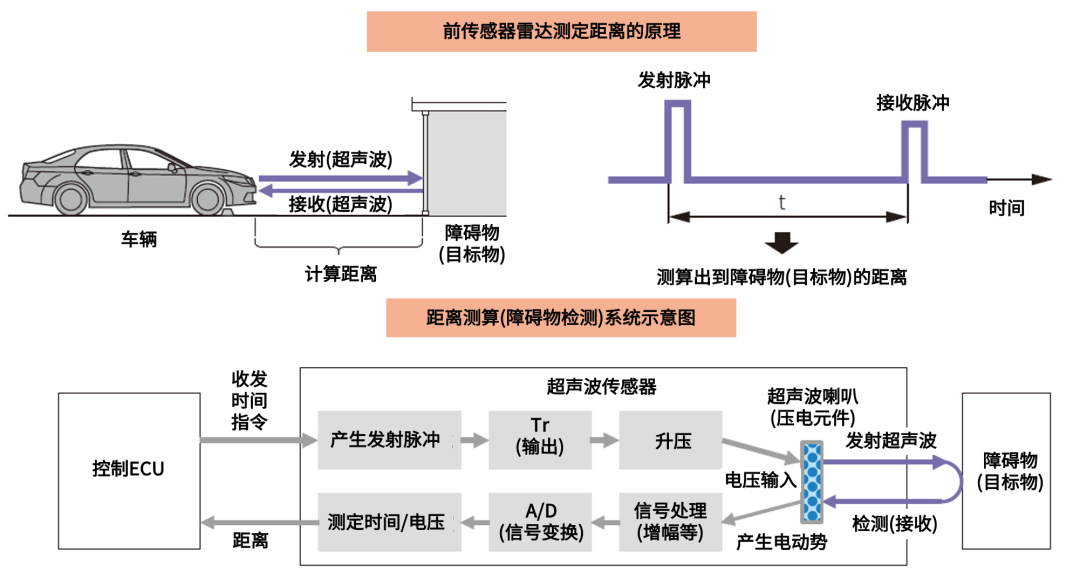
Elmos芯片,如E524.08和E524.09,是专为汽车AK2超声波传感器设计的集成电路。这些芯片集成了发射回路和接收回路,能够驱动AK2超声波传感器并处理返回的信号,从而实现距离的精确测量。在智能泊车辅助系统中,这些芯片的作用可以概括为以下几点:
距离测量:Elmos芯片能够精确测量车辆与障碍物之间的距离,这是智能泊车辅助系统的基础功能。
软件可配置参数:Elmos芯片允许通过软件配置发射功率、回波增益和接收灵敏度等重要参数,使得系统可以根据不同的应用需求进行调整。
抗干扰性:Elmos芯片与探芯一体化结构,形成全数字化探头,抗干扰性更强,这对于在复杂环境中保持系统稳定性至关重要。
探头一致性:由于芯片的集成度高,体积小巧,可以实现探头的一致性更高,这对于系统的整体性能和可靠性非常重要。
功能安全:Elmos芯片符合AEC-Q100标准,这是汽车电子设备的一个质量认证标准,确保了芯片在功能安全方面的可靠性。
Elmos芯片的通讯参数与算法功能
根据Elmos的技术文档,E524.08/09芯片支持2线或3线通讯接口,完成参数配置、状态读取和距离测量等命令的操作。这些芯片能够在10cm至600cm之间的距离测量,通过优化硬件系统和良好环境条件下,可以支持更远的距离。此外,芯片还支持STC(灵敏度时间控制)、ATG(自动阈值生成)、NFTG(近距离阈值生成)和FTC算法等附加功能,对于客户期望的应用,可以提供支持更好的适应性和优化性能。