【计算机视觉】霍夫变换检测
目录
一、引言
二、霍夫检测直线
(一)霍夫检测直线的思想
(二)实际应用
1.HoughLinesP()函数
2.HoughLines()函数
3. HoughLinesP与HoughLines的对比
三、霍夫检测圆
四、本文用到的图片样例
五、总结
一、引言
霍夫变换(Hough Transform)是图像处理中的一种特征提取技术,它通过一种投票算法检测具有特定形状的物体。该过程在一个参数空间中通过计算累计结果的局部最大值,得到一个符合该特定形状的集合作为霍夫变换结果。
霍夫变换于 1962 年由 Paul Hough 首次提出,后于 1972 年由 Richard Duda 和 Peter Hart 推广使用。经典霍夫变换用来检测图像中的直线,后来霍夫变换扩展到任意形状物体的识别(多为圆和椭圆)。
霍夫变换运用两个坐标空间之间的变换,将 “一个空间中具有相同形状的曲线或直线” 映射到 “另一个坐标空间的一个点上” 形成峰值,从而把 “检测任意形状的问题” 转化为 “统计峰值问题”。
二、霍夫检测直线
对于平面中的一条直线,在笛卡儿坐标系中,常见的有点斜式、两点式两种表示方法。但在霍夫变换中,采用另一种表示方式:使用 (r, 来表示一条直线。其中,)
r 为该直线到原点的距离, 为该直线的垂线与 x 轴的夹角。
(一)霍夫检测直线的思想
使用霍夫变换检测直线的思想是:为每一个点假设 n 个方向的直线(通常 n=180,此时直线的角度精度为 ![]() ),分别计算这 n 条直线的 (r,θ) 坐标,得到 n 个坐标点。
),分别计算这 n 条直线的 (r,θ) 坐标,得到 n 个坐标点。
若要判断的点共有 N 个,最终会得到 N×n 个 (r,θ) 坐标(其中 θ 是离散角度,共 180 个取值)。
最重要的规律是:如果多个点在同一条直线上,那么这些点在  时,其 r 会近似等于
时,其 r 会近似等于 ![]() —— 即这些点都落在直线
—— 即这些点都落在直线 上。
上。
(二)实际应用
在实际的直线检测场景中,如果超过一定数目的点拥有相同的 (r,θ) 坐标,则可判定此处存在一条直线。在 r−θ 坐标系图中,“明显的交汇点” 就表示一条检测出的直线。
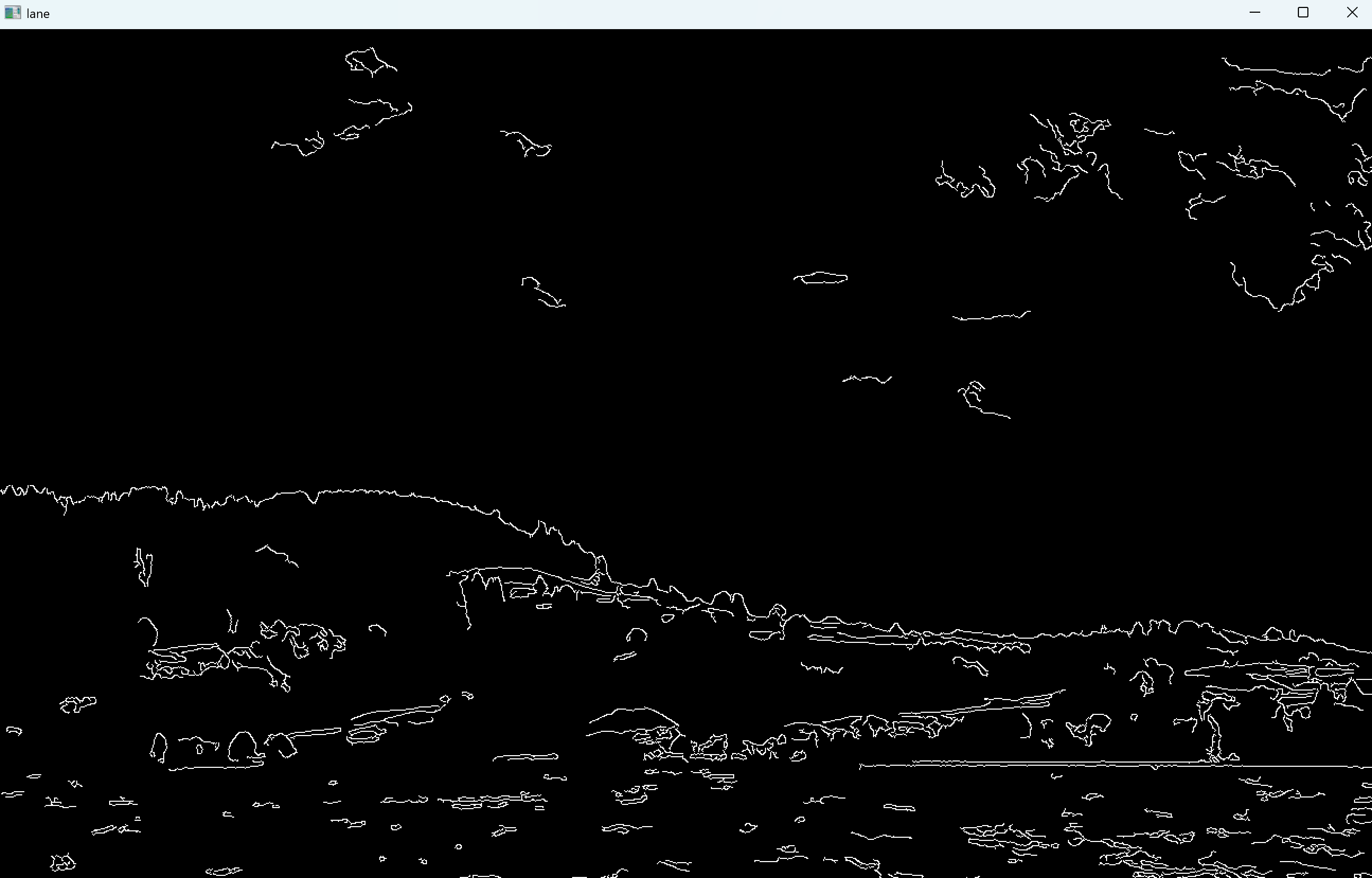
例如:用到Canny进行边缘检测,来提取车道线,代码如下:
import cv2
lane = cv2.imread("final_roi.png")
# 高斯模糊,Canny边缘检测需要的
lane = cv2.GaussianBlur(lane, (5, 5), 0)
# 进行边缘检测,减少图像空间中需要检测的点数量
lane = cv2.Canny(lane, 50, 150)
cv2.imshow("lane", lane)
cv2.imwrite('detected_lane_result.jpg', lane)
cv2.waitKey()
1.HoughLinesP()函数
cv2.HoughLinesP 是 OpenCV 中用于概率霍夫变换(Probabilistic Hough Transform)的函数,专门用于检测图像中的线段(有限长度的直线段),在计算机视觉的直线特征提取任务中(如车道线检测、工业轮廓识别等)应用广泛。
(1) 核心原理与优势
霍夫变换的本质是 **“图像空间→参数空间” 的转换 **:将图像中 “直线的检测” 转化为 “参数空间中投票峰值的寻找”。
- 传统霍夫变换(
cv2.HoughLines)检测无限长的直线,返回直线的极坐标参数 (r,θ)。 HoughLinesP是概率霍夫变换,更高效且直接检测有限长度的线段,通过 “随机采样 + 投票” 减少计算量,还能直接返回线段的起点和终点坐标,更贴合实际应用场景(如自动驾驶中 “车道线是线段” 的需求)。
(2) 函数参数解析
函数形式:
lines = cv2.HoughLinesP(image, rho, theta, threshold, minLineLength=None, maxLineGap=None)
各参数含义:
image:输入图像,必须是二值边缘图像(通常由Canny、Sobel等边缘检测得到,用于突出直线的边缘特征)。rho:距离分辨率(单位:像素),表示霍夫参数空间中 “直线到原点的距离 r” 的精度。值越小,检测精度越高,但计算量越大。theta:角度分辨率(单位:弧度),表示霍夫参数空间中 “直线垂线与 x 轴夹角 θ” 的精度。例如np.pi/180表示 1° 的精度。threshold:累加器阈值。只有当某条线段的 “投票数”(即有多少边缘点支持这条线段)≥ 该阈值时,才会被判定为 “有效线段”。阈值越高,检测的线段越 “可信”,但可能漏掉弱边缘的线段;阈值越低,检测的线段越多,但噪声也会增加。minLineLength:线段的最小长度。短于该长度的线段会被过滤,用于排除 “零碎的短线段”。maxLineGap:线段间的最大间隔。若两条线段的端点距离 ≤ 该值,会被合并为一条线段,用于连接 “接近但未完全连续” 的线段。
(3) 工作流程
HoughLinesP 的执行分为 4 个关键步骤:
- 图像预处理:输入需为二值边缘图像(如
Canny输出),目的是提取图像中的边缘特征,减少无效计算。 - 概率霍夫投票:在霍夫参数空间(r−θ 空间)中,通过 “随机采样部分边缘点 + 投票统计” 的方式,快速寻找潜在的线段。
- 阈值与长度 / 间隔过滤:先用
threshold筛选 “投票数足够” 的线段,再通过minLineLength过滤短线、maxLineGap合并接近的线段。 - 输出线段坐标:返回所有检测到的线段,每个线段以
(x1, y1, x2, y2)表示(起点和终点的像素坐标)。
(4) 参数调优与应用场景
参数需根据场景灵活调整:
rho&theta:通常设为较小值(如rho=1、theta=np.pi/180)保证基础精度;若对速度要求极高,可适当增大(但会降低精度)。threshold:噪声大时提高阈值(过滤噪声);边缘弱时降低阈值(保留更多线段)。minLineLength&maxLineGap:检测长线段(如车道线)时,增大minLineLength、减小maxLineGap;检测短而零散的线段时,减小minLineLength、增大maxLineGap。
典型应用:
- 自动驾驶:检测车道线、交通标志的直线轮廓。
- 工业视觉:检测生产线上零件的边缘线段、缺陷的直线特征。
- 机器人导航:识别环境中的墙体、门框等直线型结构。
示例代码:
import numpy as np
import cv2lane = cv2.imread("lane.jpg")
# 高斯模糊,Canny边缘检测需要的
lane = cv2.GaussianBlur(lane, (5, 5), 0)
# 进行边缘检测,减少图像空间中需要检测的点数量
lane = cv2.Canny(lane, 50, 150)
cv2.imshow("lane", lane)
cv2.waitKey()rho = 1 # 距离分辨率
theta = np.pi / 180 # 角度分辨率
threshold = 10 # 霍夫空间中曲线相交的“有效交点”阈值
min_line_len = 10 # 构成一条直线的最少像素点数量
max_line_gap = 50 # 线段之间的最大间隔像素
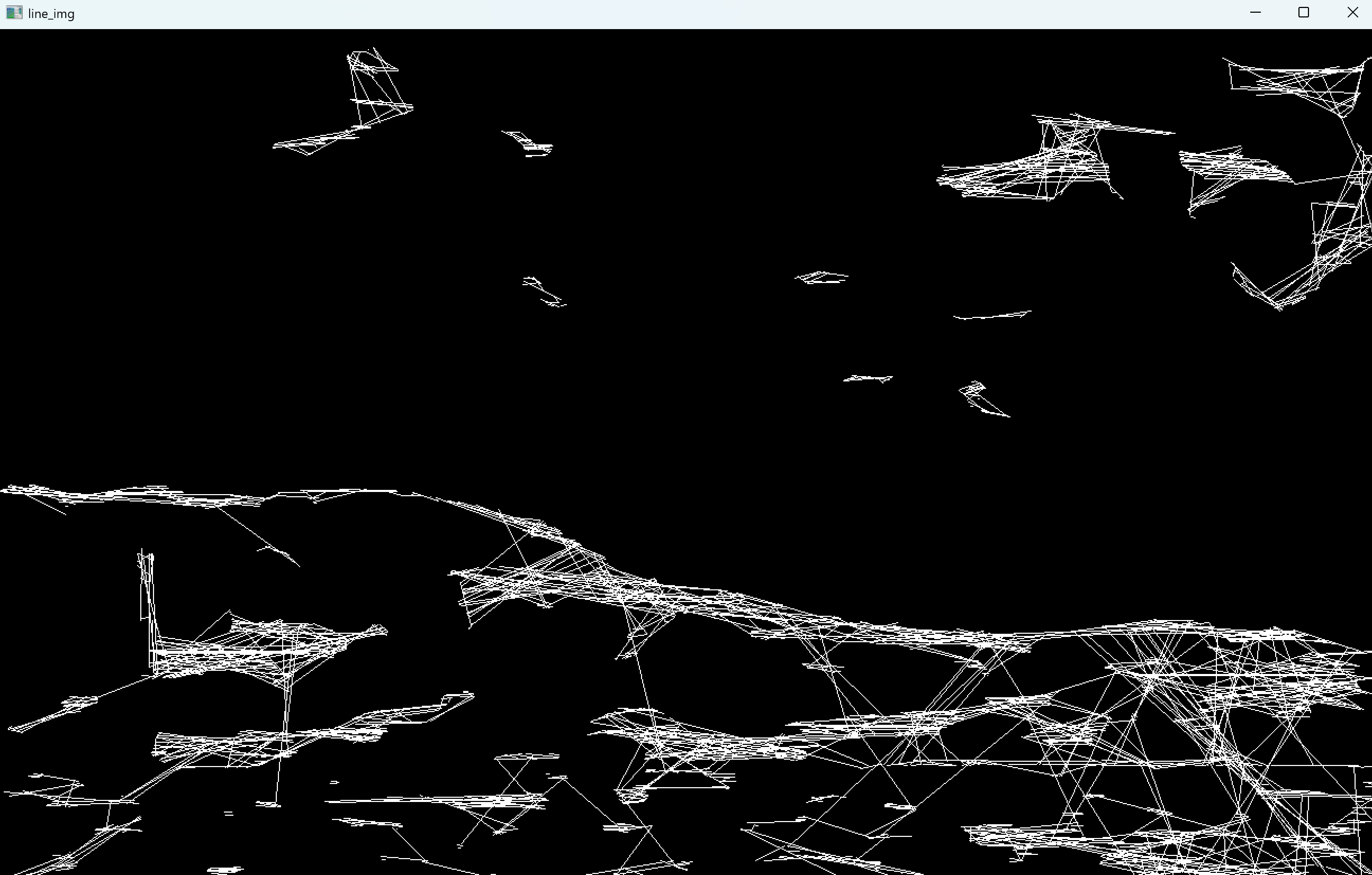
lines = cv2.HoughLinesP(lane, rho, theta, threshold, maxLineGap=max_line_gap)line_img = np.zeros_like(lane)
for line in lines:for x1, y1, x2, y2 in line:cv2.line(line_img, (x1, y1), (x2, y2), 255, 1)cv2.imshow("line_img", line_img)
cv2.waitKey()
2.HoughLines()函数
HoughLines() 是计算机视觉中经典霍夫变换(Hough Transform)的核心函数,用于在图像中检测无限长的直线,广泛应用于车道线检测、工业缺陷检测等场景。
(1)核心功能
基于 “图像空间→极坐标参数空间” 的转换,通过 “投票统计” 检测图像中由边缘点构成的无限长直线,输出直线的极坐标参数(距离 ρ + 角度 θ)。
(2)参数与返回值(以 OpenCV 版本为例)
函数原型:
lines = cv2.HoughLines(image, rho, theta, threshold)
1. 输入参数
image:输入图像,必须是 8 位灰度的二值图像(通常由Canny等边缘检测生成,突出直线的边缘特征)。rho:距离分辨率(单位:像素),表示 “直线到图像原点的距离 ρ” 的精度。值越小,检测越精细,但计算量越大。theta:角度分辨率(单位:弧度),表示 “直线垂线与 x 轴的夹角 θ” 的精度。例如np.pi/180表示 1° 精度。threshold:累加器阈值。只有 “投票数”(支持该直线的边缘点数量)≥ 此阈值的直线,才会被判定为有效。阈值越高,直线越 “可信” 但易漏检;阈值越低,检测直线越多但噪声大。- 可选参数(如
srn、stn、min_theta、max_theta):用于多尺度霍夫变换或限制角度范围,默认用经典霍夫变换时可忽略。
2. 返回值
返回数组 lines,每个元素为 (rho, theta) 元组,含义:
- ρ:直线到图像左上角原点 (0,0) 的垂直距离(单位:像素)。
- θ:直线的垂线与 x 轴的夹角(单位:弧度)。
(3)原理:“投票机制” 与空间转换
经典霍夫变换的核心是 “从图像空间到极坐标参数空间的映射”:
- 图像空间的点 → 参数空间的曲线:图像中每个边缘点,在极坐标参数空间(ρ−θ 平面)对应一条正弦曲线(满足 ρ=xcosθ+ysinθ)。
- 投票统计峰值:若多个边缘点共线,它们在参数空间的正弦曲线会交汇于同一点(即 “投票峰值”)。
- 提取直线:当投票数超过
threshold时,该交点对应的 (ρ,θ) 就是图像中存在的直线。
(4)特点与局限性
- 特点:
- 检测无限长的直线,精度高(由
rho和theta控制)。 - 能检测 “部分被遮挡或有噪声” 的直线(只要边缘点足够多)。
- 检测无限长的直线,精度高(由
- 局限性:
- 计算量大(需遍历所有边缘点并映射到参数空间)。
- 仅能输出 “无限长直线的极坐标”,无法直接得到线段的端点(若需线段检测,需用
HoughLinesP)。
示例代码:
import cv2
import numpy as np
import matplotlib.pyplot as pltimg = cv2.imread('line.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图像
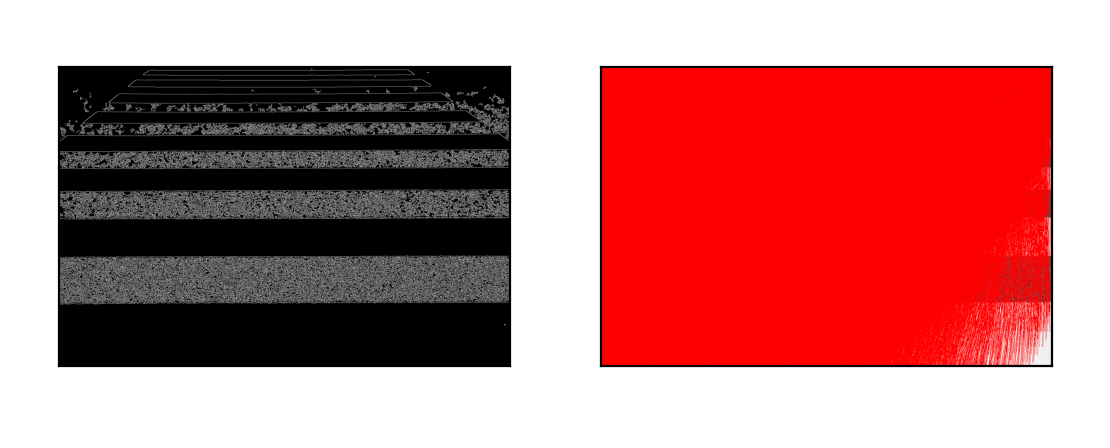
edges = cv2.Canny(gray, 50, 200) # Canny边缘检测# 显示边缘检测结果
plt.subplot(121), plt.imshow(edges, 'gray')
plt.xticks([]), plt.yticks([])# HoughLines 霍夫直线变换
lines = cv2.HoughLines(edges, 1, np.pi/180, 160)
lines1 = lines[:, 0, :] # 提取为二维数组# 遍历每条检测到的直线,绘制到原图
for rho, theta in lines1[:]:a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rhox1 = int(x0 + 1000 * (-b))y1 = int(y0 + 1000 * (a))x2 = int(x0 - 1000 * (-b))y2 = int(y0 - 1000 * (a))cv2.line(img, (x1, y1), (x2, y2), (255, 0, 0), 1)# 显示绘制直线后的结果
plt.subplot(122), plt.imshow(img)
plt.xticks([]), plt.yticks([])
plt.show()
3. HoughLinesP与HoughLines的对比
HoughLinesP 是概率霍夫变换(对经典霍夫的优化),二者核心差异如下:
| 函数 | 霍夫变换类型 | 检测对象 | 计算效率 | 输出形式 |
|---|---|---|---|---|
HoughLines | 经典霍夫 | 无限长直线 | 较低 | 极坐标 (ρ,θ) |
HoughLinesP | 概率霍夫 | 有限长线段 | 较高 | 线段端点 (x1,y1,x2,y2) |
三、霍夫检测圆
圆形的表达式为(x−xcenter)2+(y−ycenter)2=r2,确定一个圆环需要 3 个参数。那么霍夫变换的累加器必须是三维的,但是这样的计算效率很低。
因此,OpenCV 中使用霍夫梯度的方法,这里利用了边界的梯度信息。首先对图像进行 Canny 边缘检测,对边缘中的每一个非 0,通过 Sobel 算法计算局部梯度。那么计算得到的梯度方向,实际上就是圆切线的法线。3 条法线即可确定一个圆心;同理,在累加器中对圆心通过的法线进行累加,就得到了圆环的判定。
以霍夫梯度法实现圆环检测的函数为:
cv2.HoughCircles(image, method, dp, minDist, circles, param1, param2, minRadius, maxRadius)其中,各参数含义如下:
image—— 输入图像,格式为灰度图;method—— 检测方法,常用CV_HOUGH_GRADIENT。dp—— 检测内侧圆心的累加器图像的分辨率与输入图像之比的倒数,如果dp=1,则累加器和输入图像具有相同的分辨率;如果dp=2,则累计器有输入图像一半那么大的宽度和高度。minDist—— 两个圆之间圆心的最小距离。param1—— 默认值为 100,它是method设置的检测方法的对应参数,对当前唯一的方法 —— 霍夫梯度法cv2.HOUGH_GRADIENT,它表示传递给 Canny 边缘检测算子的高阈值,而低阈值为高阈值的一半。param2—— 默认值为 100,它是method设置的检测方法的对应的参数,对当前唯一的方法 —— 霍夫梯度法cv2.HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小,就越可以检测到更多根本不存在的圆;它越大,能通过检测的圆就更加接近完美的圆形。minRadius—— 默认值为 0,圆半径的最小值。maxRadius—— 默认值为 0,圆半径的最大值。
示例代码:
import cv2
import numpy as np# 1. 读取图像(确保文件名与实际一致)
img = cv2.imread('4.png', 0) # 以灰度模式读取
if img is None:print("无法读取图像!请检查文件路径/名称是否正确。")exit()# 2. 预处理:中值滤波降噪
img = cv2.medianBlur(img, 5)
cimg = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR) # 转彩色(用于绘制彩色圆)# 3. 霍夫圆变换(调整参数以适配足球特征)
circles = cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,dp=1, # 累加器分辨率与图像分辨率的比值minDist=30, # 圆心间最小距离param1=80, # Canny边缘检测的高阈值param2=25, # 霍夫空间“圆心”的累加阈值minRadius=0, # 圆的最小半径maxRadius=300 # 圆的最大半径
)# 4. 空值检查:确保检测到了圆
if circles is not None:circles = np.uint16(np.around(circles)) # 坐标转整数# 遍历检测到的圆,绘制外圆和圆心for i in circles[0, :]:# 画外圆(绿色,线宽2)cv2.circle(cimg, (i[0], i[1]), i[2], (0, 255, 0), 2)# 画圆心(红色,线宽3,小圆半径2)cv2.circle(cimg, (i[0], i[1]), 2, (0, 0, 255), 3)# 显示结果cv2.imshow('detected circles', cimg)# 保存结果图片save_success = cv2.imwrite('detected_circles_result.jpg', cimg)if save_success:print("检测结果已成功保存为 'detected_circles_result.jpg'")else:print("保存图片失败,请检查是否有写入权限或路径是否正确")cv2.waitKey(0)
else:print("未检测到圆!请调整霍夫圆变换的参数(如 param2、minDist 等)。")cv2.destroyAllWindows()

四、本文用到的图片样例
![]()

![]()

![]()

五、总结
本文介绍了霍夫变换(Hough Transform)在图像处理中的应用,重点阐述了直线和圆形的检测方法及其实现。首先概述了霍夫变换的基本原理,即通过参数空间转换将图像中的形状检测转化为统计峰值问题。随后详细讲解了两种直线检测方法:经典霍夫变换(HoughLines)检测无限长直线,返回极坐标参数;概率霍夫变换(HoughLinesP)更高效地检测有限线段,直接输出端点坐标。对于圆形检测,介绍了基于霍夫梯度法的实现(HoughCircles),并分析了各参数对检测结果的影响。文章还提供了完整的代码示例,展示了从图像预处理到形状检测的完整流程,包括参数调优建议和实际应用场景。最后通过对比不同方法的特点,帮助读者根据具体需求选择合适的检测方案。