一款基于STM32F103和树莓派的无人车
ref:基于智能导航与抓取的智仓搬运机器人
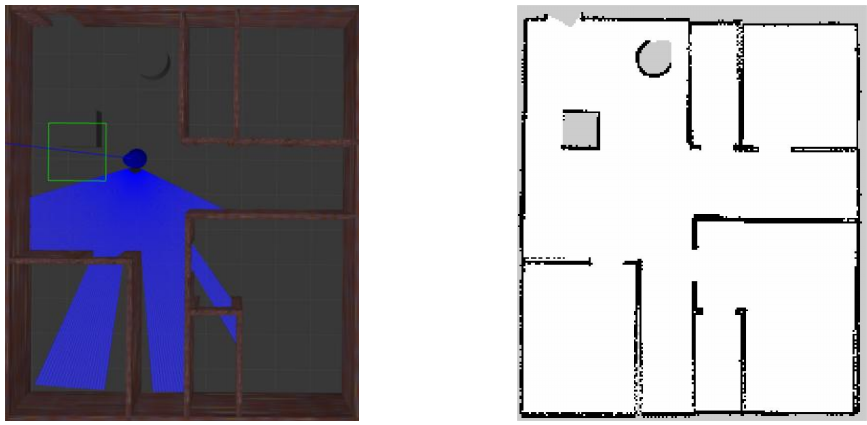
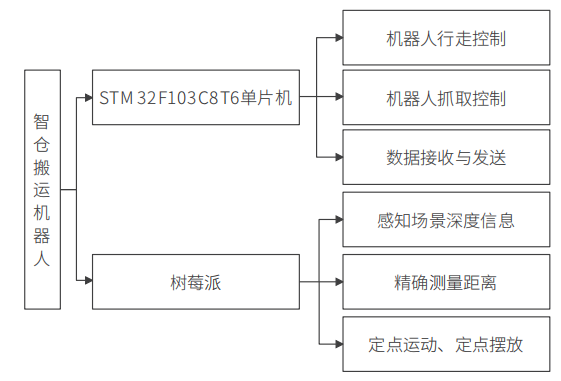
系统架构: STM32F103C8T6 芯片作为控制芯片,来控制机器人的行走与抓取;树莓派4B控制板作为导航算法运行板,通过深度摄像头与激光雷达,来对环境进行场景建图并且实时建图,最终协同实现机器人的定点运动、取放。
Gmapping算法: SLAM雷达导航与视觉技术实现地图构建,并使用优化后的A-STAR算法有效减少了机器人运行时间和路径距离。
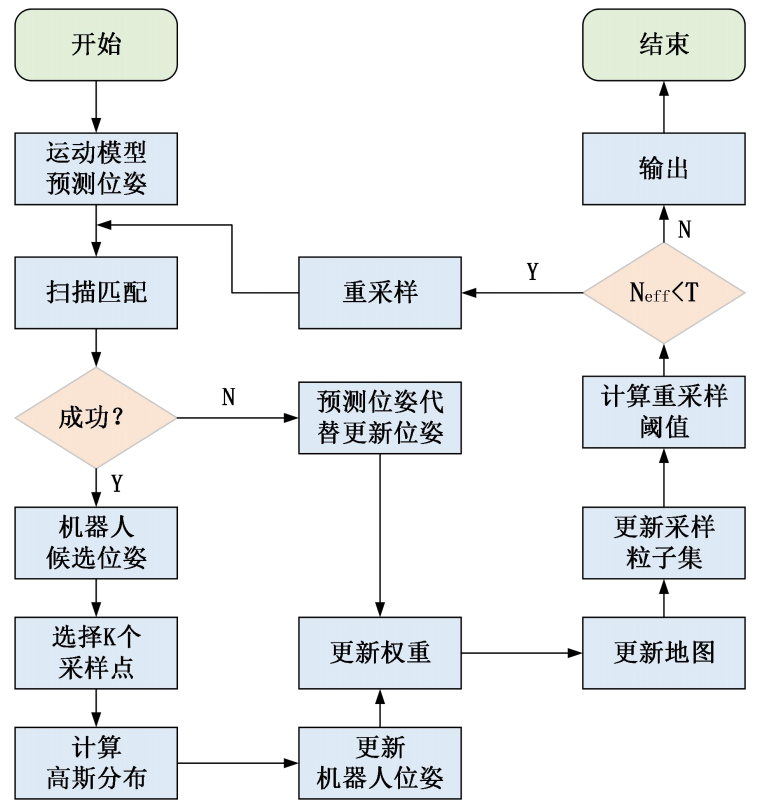
A-STAR 算法路径规划优化: 为提升搬运机器人在复杂环境下路径规划的效率与精度,对 A-STAR 算法的启发式函数进行了三方面的改进与优化:
在启发式函数中引入方向性加权机制,将传统的曼哈顿距离与角度夹角信息结合,新增一个基于向量内积的角度代价项 CROSS,即将从当前节点指向目标节点与起点指向目标节点的向量方向差异作为权值,加入评价函数 f(n) = g(n) + h(n) + w*CROSS,使搜索更具目标导向性,路径更平滑。(CEOSS 表示从路径的起点到终点的向量,与当前计算节点到终点向量的内积)
在 OPEN 列表的数据结构上使用最小二进制堆,代替传统线性链表,使每次选取最小总代价值节点的复杂度从 O(n) 降为 O(log n),显著加快了搜索速度
在邻域扩展上突破经典八方向限制,引入多阶邻域策略,即在考虑一阶邻域基础上,进一步引入二阶、三阶邻域,即 16 个点或 24 个点,允许搜索算法在更大范围内探测可行路径,提高了在复杂障碍环境中的可通行性与全局最优解能力。