ORB_SLAM2原理及代码解析:MapPoint::UpdateNormalAndDepth() 函数
目录
1 作用
2 位置及代码
3 参数及含义
4 代码解析
4.1 加锁及拷贝数据
4.2 检测是否观测
4.3 计算平均法向量
4.3.1 GetCameraCenter() 函数
4.3.2 normali / cv::norm(normali)
4.4 计算平均可观测距离
4.5 更新成员变量
1 作用
更新地图点的法向量 (
mNormalVector),更新地图点的可观测距离范围 (mfMinDistance/mfMaxDistance)以便后续在跟踪或重建中判断该点是否可见。即把地图点的方向和深度信息 重新计算一遍。
2 位置及代码
(1)声明:MapPoint.h
void UpdateNormalAndDepth();(2)定义:MapPoint.cc
void MapPoint::UpdateNormalAndDepth() {map<KeyFrame*,size_t> observations;KeyFrame* pRefKF;cv::Mat Pos;{unique_lock<mutex> lock1(mMutexFeatures);unique_lock<mutex> lock2(mMutexPos);if(mbBad)return;observations=mObservations;pRefKF=mpRefKF;Pos = mWorldPos.clone();}if(observations.empty())return;cv::Mat normal = cv::Mat::zeros(3,1,CV_32F);int n=0;for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++){KeyFrame* pKF = mit->first;cv::Mat Owi = pKF->GetCameraCenter();cv::Mat normali = mWorldPos - Owi;normal = normal + normali/cv::norm(normali);n++;}cv::Mat PC = Pos - pRefKF->GetCameraCenter();const float dist = cv::norm(PC);const int level = pRefKF->mvKeysUn[observations[pRefKF]].octave;const float levelScaleFactor = pRefKF->mvScaleFactors[level];const int nLevels = pRefKF->mnScaleLevels;{unique_lock<mutex> lock3(mMutexPos);mfMaxDistance = dist*levelScaleFactor;mfMinDistance = mfMaxDistance/pRefKF->mvScaleFactors[nLevels-1];mNormalVector = normal/n;} }
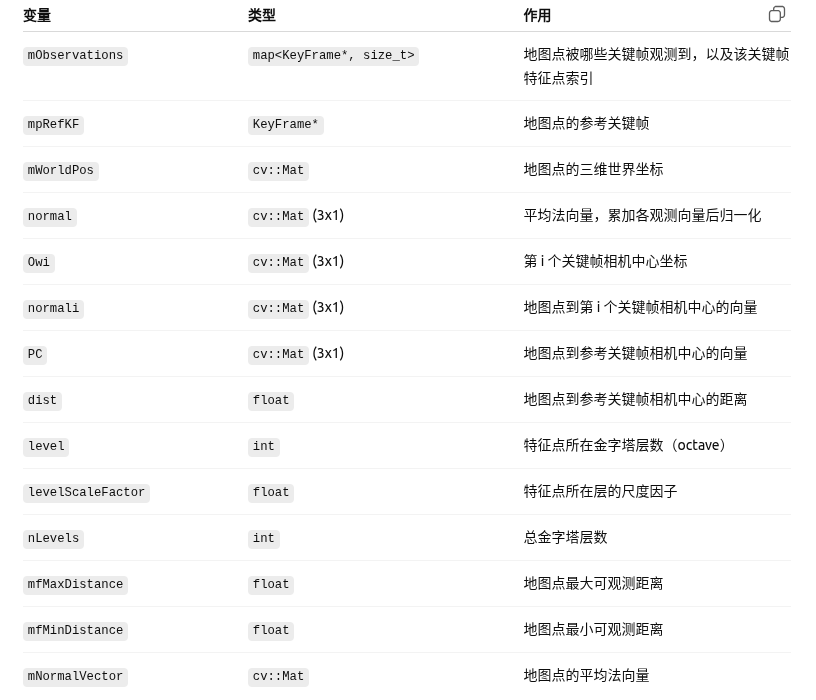
3 参数及含义
4 代码解析
4.1 加锁及拷贝数据
map<KeyFrame*,size_t> observations;KeyFrame* pRefKF;cv::Mat Pos;{unique_lock<mutex> lock1(mMutexFeatures);unique_lock<mutex> lock2(mMutexPos);if(mbBad)return;observations=mObservations;pRefKF=mpRefKF;Pos = mWorldPos.clone();}
4.2 检测是否观测
if(observations.empty())return;
4.3 计算平均法向量
cv::Mat normal = cv::Mat::zeros(3,1,CV_32F);int n=0;for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++){KeyFrame* pKF = mit->first;cv::Mat Owi = pKF->GetCameraCenter();cv::Mat normali = mWorldPos - Owi;normal = normal + normali/cv::norm(normali);n++;}
4.3.1 GetCameraCenter() 函数
(1)声明:frame.h
// Returns the camera center.inline cv::Mat GetCameraCenter(){return mOw.clone();}(2)定义:KeyFrame.cc
cv::Mat KeyFrame::GetCameraCenter() {unique_lock<mutex> lock(mMutexPose);return Ow.clone(); }相机中心Ow运算见SetPose() 函数-2.2:
https://blog.csdn.net/weixin_45728280/article/details/152333209?spm=1011.2124.3001.6209
4.3.2 normali / cv::norm(normali)
将向量单位化,只考虑方向,忽略大小。
4.4 计算平均可观测距离
cv::Mat PC = Pos - pRefKF->GetCameraCenter(); //地图点(三维点世界坐标)到关键帧相机中心向量const float dist = cv::norm(PC);//地图点(三维点世界坐标)到关键帧相机中心距离const int level = pRefKF->mvKeysUn[observations[pRefKF]].octave;//计算地图点可观测距离时需要考虑尺度const float levelScaleFactor = pRefKF->mvScaleFactors[level];//特征点在金字塔层数,后续调整尺度const int nLevels = pRefKF->mnScaleLevels;//获取金字塔总层数
4.5 更新成员变量
{unique_lock<mutex> lock3(mMutexPos);mfMaxDistance = dist*levelScaleFactor;mfMinDistance = mfMaxDistance/pRefKF->mvScaleFactors[nLevels-1];//最小距离 = 最大距离 / 最小尺度因子mNormalVector = normal/n;//地图点被关键帧测得的平均方向}