《面向物理交互任务的触觉传感阵列仿真》2020AIM论文解读
目录
一、Abstract(摘要)
二、INTRODUCTION(引言)
1. 核心痛点:模拟器的 “接触可靠性失衡”
2. 传统仿真的难题与现有方案
3. 本文的第一个贡献
三、SIMULATED SENSOR(模拟传感器)
1. 仿真传感器的整体流程
2. 传感器的 “虚拟形态”
3. 模拟 “力的扩散”:点扩散函数(PSF)
4. 计算 “真实接触力”
5. 生成触觉图像:算法 1
四、SENSOR CHARACTERIZATION(传感器表征)
1. 表征设备与流程
2. 步骤 1:校准 “力 - 输出关系”
3. 步骤 2:测量 “刚度与最大穿透深度”
五、TACTILE SERVOING FOR EDGE ORIENTATION CONTROL(触觉伺服:边缘定向控制)
1. 接触特征提取:从图像到方向
2. 控制架构
六、VALIDATION AND APPLICATION(验证与应用)
1. 静态实验:对比真实与仿真触觉图像
2. 动态实验:2 自由度云台的边缘伺服
3. 复杂场景:笛卡尔空间机器人手的边缘伺服
七、CONCLUSION(结论)
1. 研究总结
2. 未来计划
一、Abstract(摘要)
仿真世界是自主机器人新算法开发的重要 “加速器”,本文提出一套虚拟触觉伺服框架。该框架包含触觉传感阵列的通用模型 —— 通过 “实证表征流程”(即从真实传感器获取关键参数),能精准模拟真实触觉阵列的行为。获得精确传感器模型后,可通过控制触觉图像中提取的 “接触特征”(如点、线),实现多种触觉伺服方案。为验证可靠性,研究团队用不同传感器和机器人开展实验,证明框架生成的仿真结果与真实实验结果高度一致。
二、INTRODUCTION(引言)
引言先指出行业痛点,再分析原因,最后引出本文方案,为后续研究铺垫。
1. 核心痛点:模拟器的 “接触可靠性失衡”
当前物理世界模拟器存在明显局限:在无需接触的应用中(如机器人无故障自适应学习),仿真足以提供数据支持;但在需精细物理交互的场景中(如安全人机协作),必须依赖真实实验采集原始信号才能解决问题。这种失衡的根源,是物理引擎难以准确仿真 “触觉传感阵列”—— 这类阵列能为机器人提供 “连杆与环境间的接触力分布”(通过行列排列的多个感应单元实现),而随着机器人 “精细灵巧操作” 需求增加,触觉传感阵列的仿真需求也愈发迫切(仿真可加速设计与落地)。
2. 传统仿真的难题与现有方案
触觉传感阵列仿真的核心难点是 “表面形变模拟”:当接触力施加时,传感器软表层会发生形变,传统方法用 “弹性理论” 计算形变,但存在 “计算成本高、解不唯一” 的问题(因需用逆滤波技术)。为解决此问题,前人提出多种方案(如表 1),各有特点:
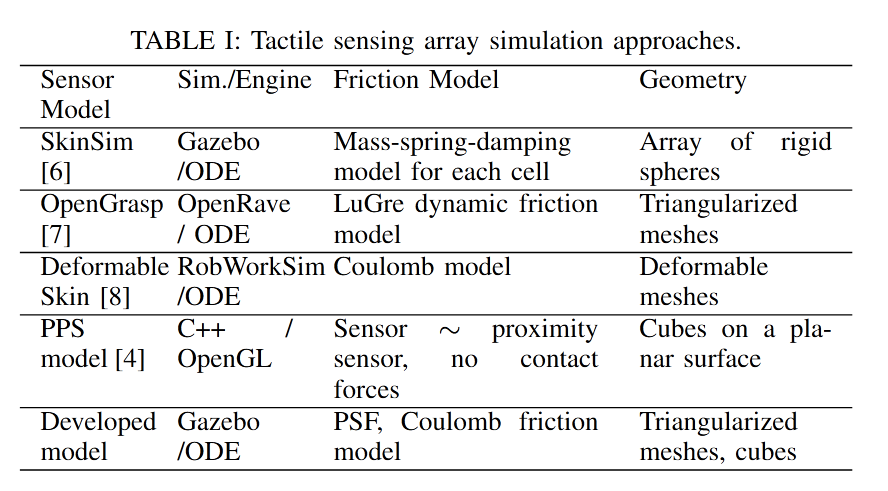
- SkinSim [6]:在 Gazebo 环境中,将每个感应单元建模为 “带虚拟弹簧的球形刚体”,通过弹簧位移反映传感器响应;
- OpenGrasp 皮肤 [7]:仅用一个刚体(表面三角化),通过每个三角形的力响应生成传感器信号;
- RobWorkSim(ODE 引擎)[8]:用多项式函数拟合弹性表面形变(基于 WeissRobotics 电阻式传感器的实证数据);
- PPS 模型 [4]:将触觉传感器视为 “接近传感器阵列”,忽略材料物理特性,用 “点扩散函数(PSF)” 处理感应单元间的信号串扰。
3. 本文的第一个贡献
针对现有方案的不足,本文提出融合式方法:整合 Gazebo 环境兼容性、真实接触力考量、PSF 实证表征三大优势,既能模拟传感器软表层对触觉图像的影响,又能保证仿真精度。
三、SIMULATED SENSOR(模拟传感器)
这是全文核心,详细讲解 “如何在虚拟环境中复现真实触觉传感器”,包含 3 个关键环节:传感器建模、接触力计算、触觉图像生成。
1. 仿真传感器的整体流程
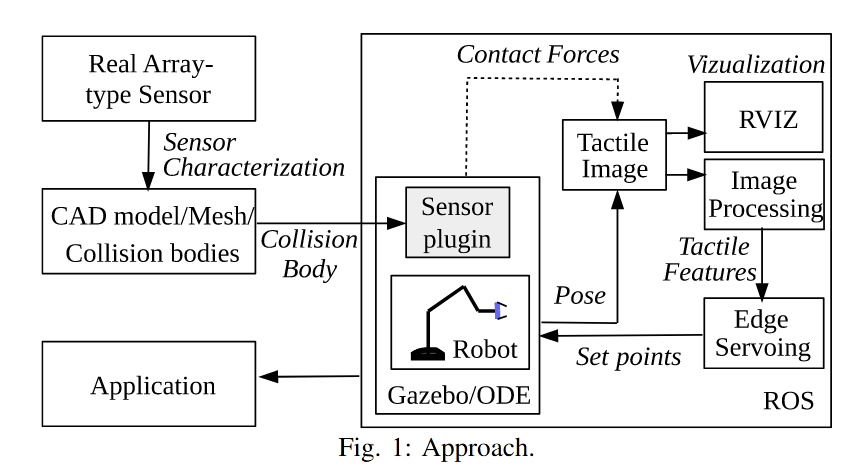
图 1 展示了从 “真实传感器” 到 “虚拟触觉图像” 的完整 pipeline:
- 实证表征:先对真实传感器做 “体检”,获取刚度、力扩散规律等关键参数;
- 虚拟建模:在 Gazebo 中构建传感器的 “三角化网格模型”(可集成到 ODE 物理引擎);
- 碰撞力计算:ODE 引擎模拟 “传感器与物体碰撞”,输出接触力分布;
- 力扩散模拟:用 PSF 处理接触力,模拟软表层的形变效应;
- 触觉图像与特征提取:生成虚拟触觉图像,用计算机视觉提取接触特征(如边缘);
- 机器人控制:将特征传给 ROS(机器人操作系统),控制机器人位姿(如调整位置对准物体)。
2. 传感器的 “虚拟形态”
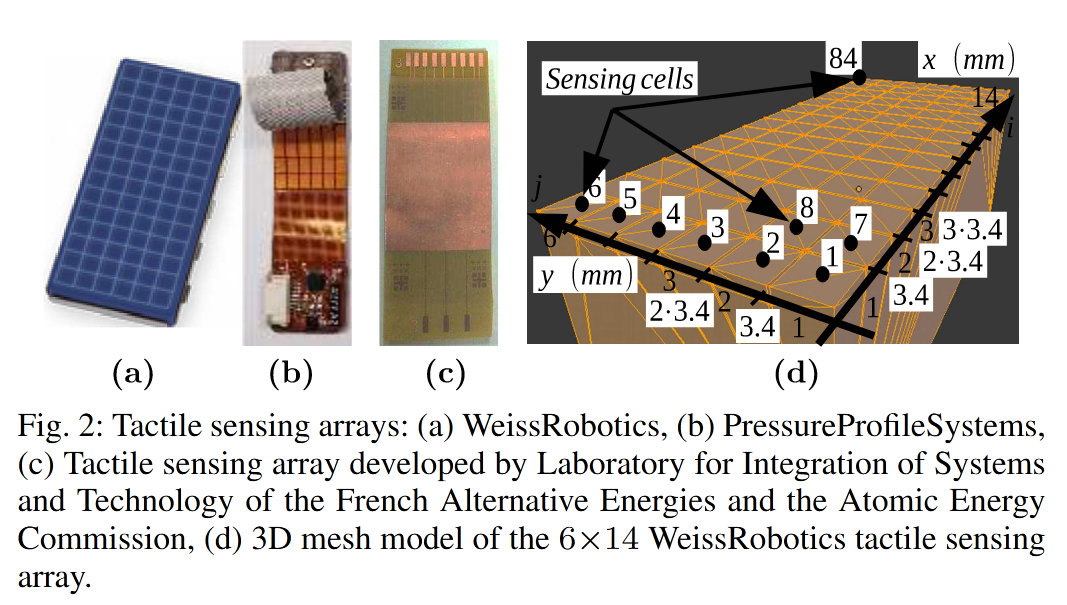
图 2 展示了 4 类关键传感器(3 种真实、1 种虚拟),确保虚拟模型与真实一致:
- (a) WeissRobotics 电阻式传感器:机器人常用,感应单元(tactel)按行列排列;
- (b) Pressure Profile Systems(PPS)电容式传感器:6×4 阵列结构;
- (c) CEA-LIST 实验室自研电容式传感器;
- (d) Weiss 传感器的虚拟模型:6 行 14 列(共 84 个 tactel),每个 tactel 用 2 个三角形表示,坐标为
x=i·3.4mm、y=j·3.4mm(3.4mm 是真实感应单元的尺寸)。
3. 模拟 “力的扩散”:点扩散函数(PSF)
真实传感器的软表层会导致 “接触力扩散”(按一个点,周围 tactel 也会有响应),本文用二维高斯函数(PSF)模拟这一过程:
- 高斯函数公式:
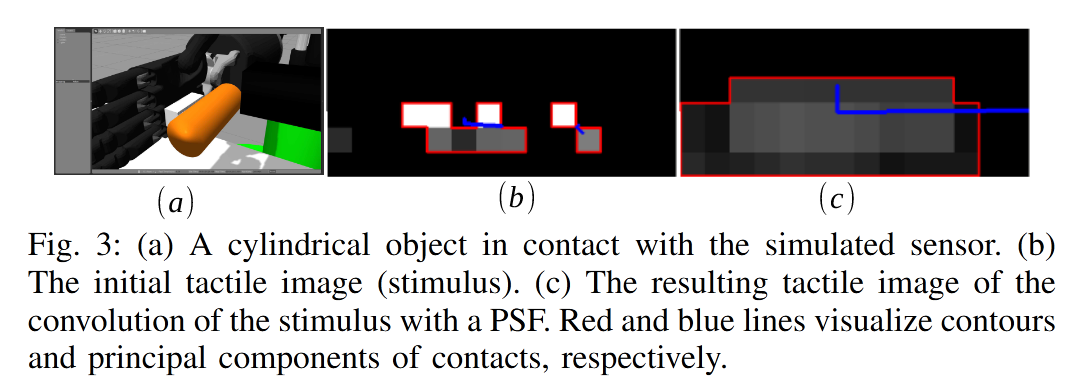
g(a,b)=1/(2πσ²)·e^(-(a²+b²)/(2σ²)),其中σ是正态分布参数(控制扩散范围),a×b是卷积核尺寸(本文取 3×3); - 仿真触觉图像计算:将 ODE 输出的接触力
F_sim(i,j)与高斯函数卷积,得到I_sim(i,j)=F_sim(i,j)*g(a,b)(*表示卷积),即每个 tactel 的最终响应; - 效果验证(图 3):(a) 虚拟场景:Shadow 机器手(掌心带 Weiss 传感器)与橙色物体接触;(b) 原始接触力图像:仅接触点有响应,不符合真实;(c) 卷积后图像:接触力向周围扩散,与真实传感器一致(红色线为接触轮廓,蓝色线为主成分方向,后续控制会用到);
- 关键参数:通过对比真实与仿真接触模式,确定
σ=0.5、3×3 卷积核,确保扩散效果真实。
4. 计算 “真实接触力”
虚拟接触力F_sim是仿真的基础,由 ODE 物理引擎计算:
- 引擎原理:模拟 “弹簧 - 阻尼系统”,允许物体轻微穿透传感器(如真实软表层的形变),基于接触物体的刚度、摩擦系数,输出 “法向力”(垂直于传感器表面)和 “切向力”(平行表面);
- 简化处理:因实验中摩擦系数低,忽略切向力,仅考虑法向力
F_n; - 力的求和与归一化:对每个 tactel(
i₀,j₀),求和其尺寸范围内(Δx×Δy×Δz)的所有法向力,再用k_scale(缩放因子)归一化,确保与真实传感器的最大输出一致,同时按真实传感器带宽做时间下采样。
5. 生成触觉图像:算法 1
算法 1 将上述步骤整合,标准化 “虚拟触觉图像生成” 流程:
- 输入参数:传感器三角化网格、真实刚度系数、表层厚度、机器人位姿;
- 计算接触力:ODE 引擎输出
Nx×Ny(行列数)的接触力矩阵; - 力缩放:按公式(2)计算
F_sim(i,j); - 卷积生成图像:按公式(1)计算
I_sim(i,j); - 输出:仿真触觉图像
I_sim。
四、SENSOR CHARACTERIZATION(传感器表征)
仿真参数需从真实传感器获取,这一步叫 “表征”—— 用专用设备测真实传感器的关键参数(如力 - 输出关系、刚度),为仿真提供 “基准”。
1. 表征设备与流程
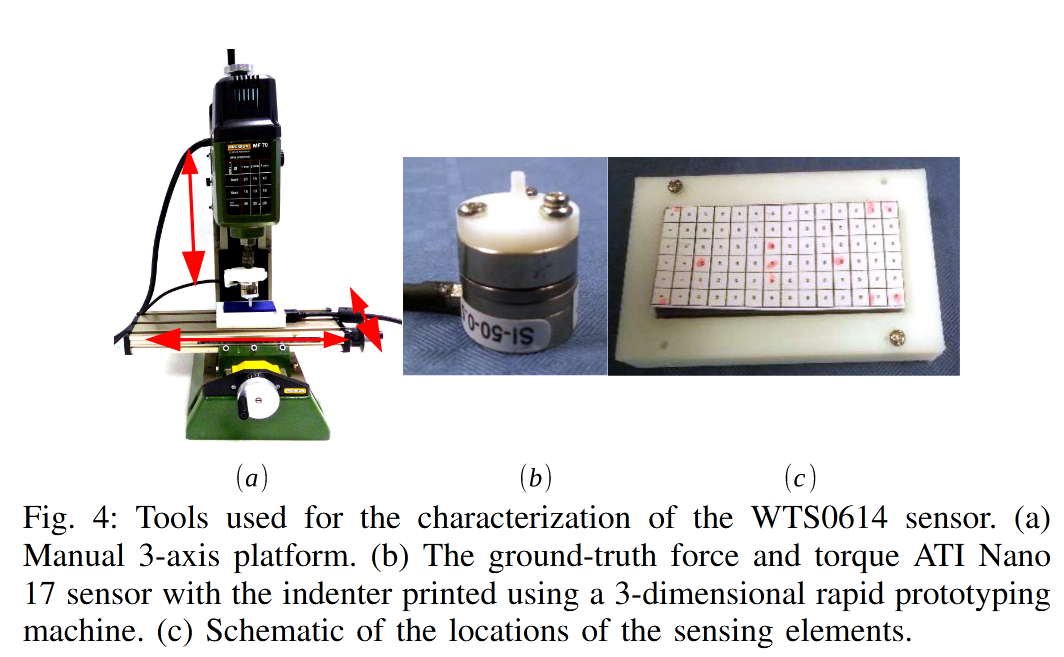
实验对象是 WeissRobotics WTS0614 电阻式传感器(输出 12 位原始电压值),核心设备包括:
- (a) Proxxon mf70 三轴手动平台:精度高(水平 0.2mm,垂直 0.05mm),用于控制压头精准接触传感器;
- (b) ATi Nano17 力扭矩传感器:作为 “基准设备”,精准测量接触力,下方接 3D 打印的 1mm 直径圆柱压头;
- (c) tactel 位置图:标注每个感应单元的坐标,避免压错位置;
- 实验流程:将传感器固定在平台上,压头对准每个 tactel 中心,缓慢压至传感器输出饱和,同步记录 “压入深度”“传感器输出”“基准力”(用 ROS 同步数据,避免时间差)。
2. 步骤 1:校准 “力 - 输出关系”
真实传感器的输出与受力并非完全线性,需校准:
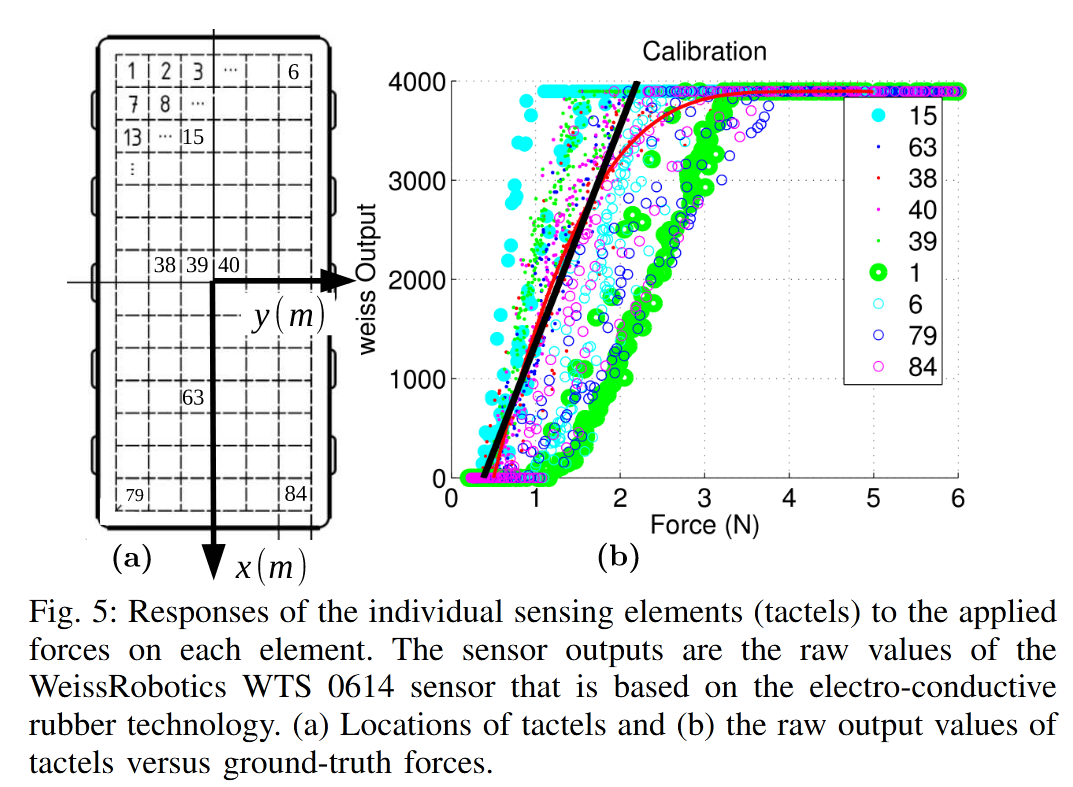
- 线性范围:实验发现传感器在 0.2N~1.8N 范围内线性良好,换算系数
k_out→force=(1.8-0.2)/(3840-0)=0.0004 N/单位输出(即输出 3840 对应 1.8N); - 灵敏度差异:中心 tactel(如 15 号)比边缘 tactel(如 1 号)更灵敏 —— 因传感器橡胶从侧面固定,边缘橡胶更硬,需对每个 tactel 单独校准;
- 图 5 (b):纵轴为传感器原始输出,横轴为基准力,黑色线为线性拟合,直观展示力 - 输出关系。
3. 步骤 2:测量 “刚度与最大穿透深度”
刚度(压入 1mm 所需的力)是仿真中 “形变模拟” 的关键参数:
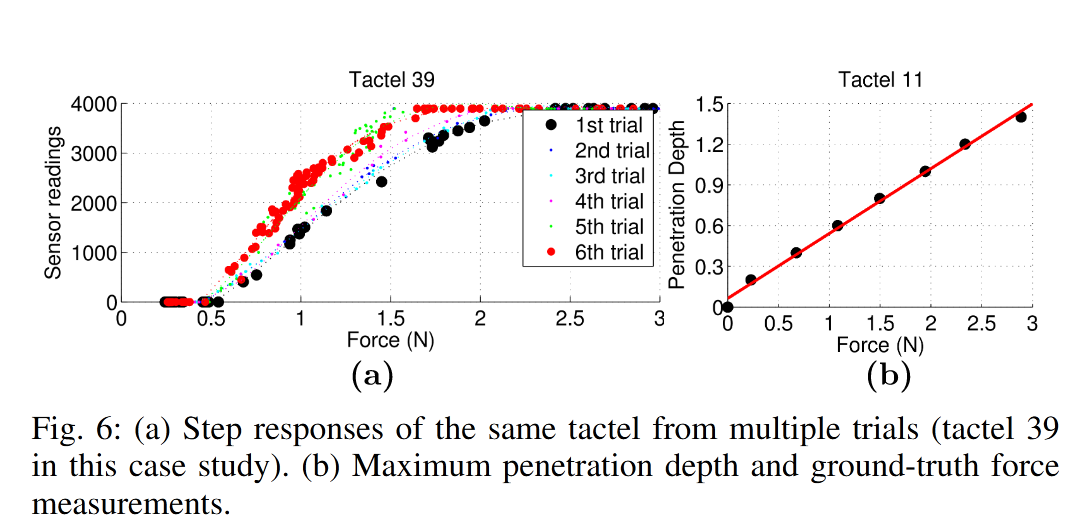
- 重复性问题:图 6 (a) 显示,同一 tactel(39 号)多次受压,输出有波动 —— 因真实橡胶存在 “蠕变”(力不变时输出缓慢变化)、温度影响,但仿真可避免这些误差;
- 刚度计算:图 6 (b) 是 “基准力 - 压入深度” 曲线,红色线为线性拟合,算出刚度
k≈2 N/m(压入 1mm 需 2N); - 最大穿透深度:传感器能承受的最大压入距离,作为仿真的 “形变边界”,确保虚拟形变不超出真实范围。
五、TACTILE SERVOING FOR EDGE ORIENTATION CONTROL(触觉伺服:边缘定向控制)
有了真实的虚拟触觉图像,下一步是 “用触觉反馈控制机器人”—— 本文以 “边缘定向控制” 为例,说明如何通过触觉特征实现精准控制,配套图 7 展示控制架构。
1. 接触特征提取:从图像到方向
机器人与物体接触时,触觉图像中会出现 “点接触” 或 “边缘接触”,本文聚焦 “边缘接触”:
- 边缘方向计算:用主成分分析(PCA) 提取触觉图像中接触点的 “主成分 U₁”——U₁是接触点分布最广的方向(即边缘方向);
- 角度公式:边缘与传感器 x 轴的夹角
α_z=tan⁻¹(U₁/eₓ),其中eₓ是传感器 x 轴的基向量。
2. 控制架构
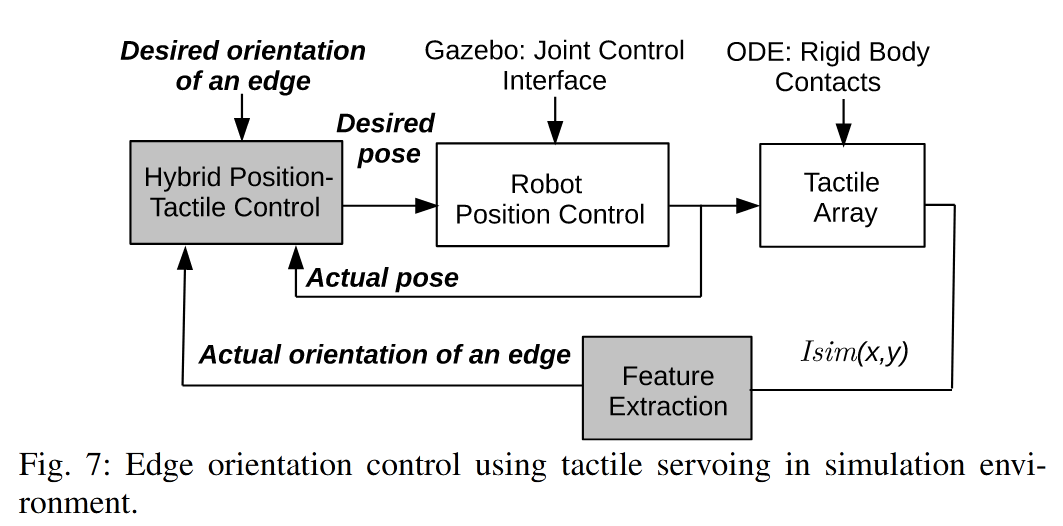
核心逻辑是 “对比期望与实际边缘方向,调整机器人位姿”:
- 设定 “期望边缘方向”(如与传感器 x 轴平行);
- 按算法 1 生成仿真触觉图像
I_sim,用 PCA 提取 “实际边缘方向”; - 计算方向误差
Δx(实际与期望的差值); - 将误差传给机器人的笛卡尔位置控制器,调整末端执行器位姿,直至误差为零。
六、VALIDATION AND APPLICATION(验证与应用)
为证明框架的可靠性,研究团队开展 3 类实验(静态→动态→复杂场景),用真实数据验证仿真精度,配套图 8-12 展示实验结果。
1. 静态实验:对比真实与仿真触觉图像
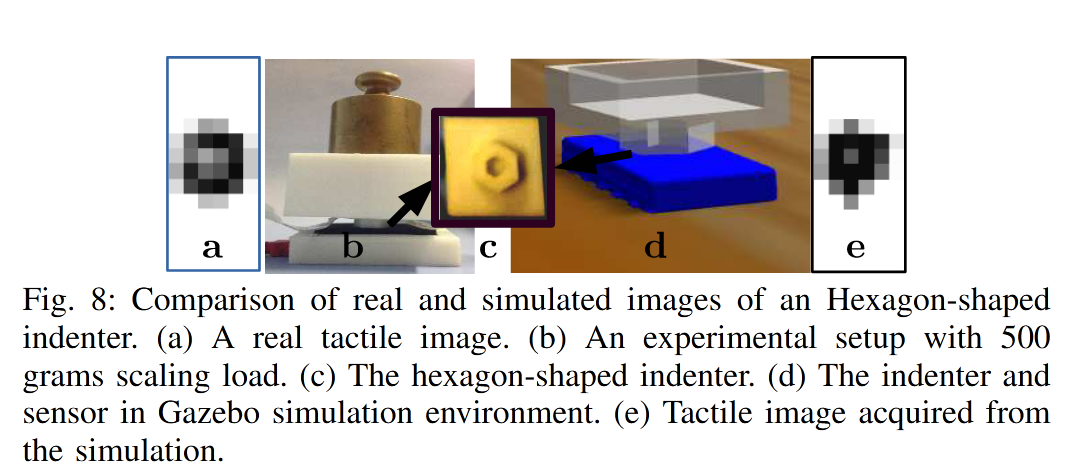
静态场景指 “接触力不随时间变化”,实验对象是 Weiss 传感器:
- 实验设计:用不同形状的压头(如六边形),分别对真实传感器(加载 100g/500g 重物)和虚拟传感器施压,对比两者的触觉图像;
- 图 8 效果:(a) 真实触觉图像(六边形压头);(e) 仿真触觉图像;肉眼可见两者 “亮区”(受力大的 tactel)分布一致;
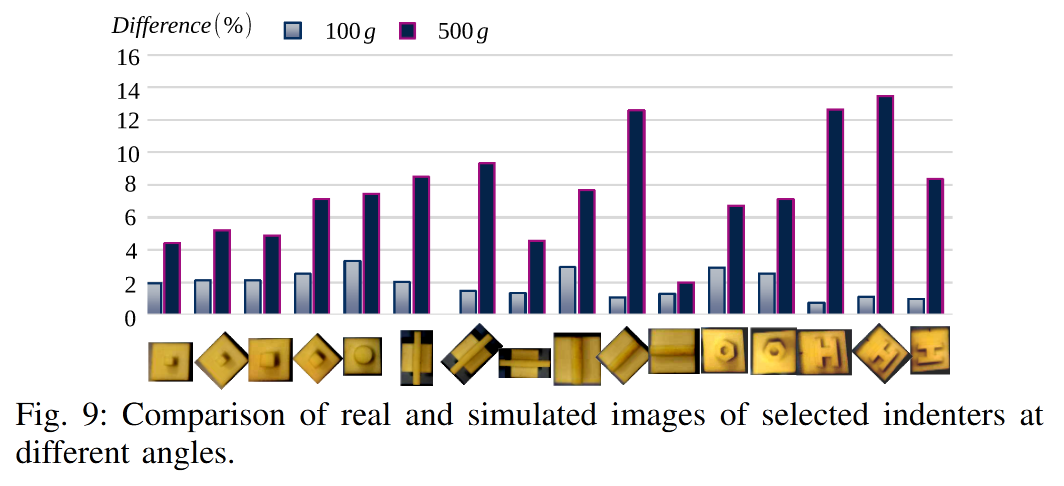
- 定量误差:用
d_I,σ=<I_sim,I_real>(仿真与真实图像的强度差)衡量相似度,图 9 显示,不同角度(0°/45°/90°)、不同负载下,误差中位数约 5%—— 精度足以支持动态场景验证。
2. 动态实验:2 自由度云台的边缘伺服
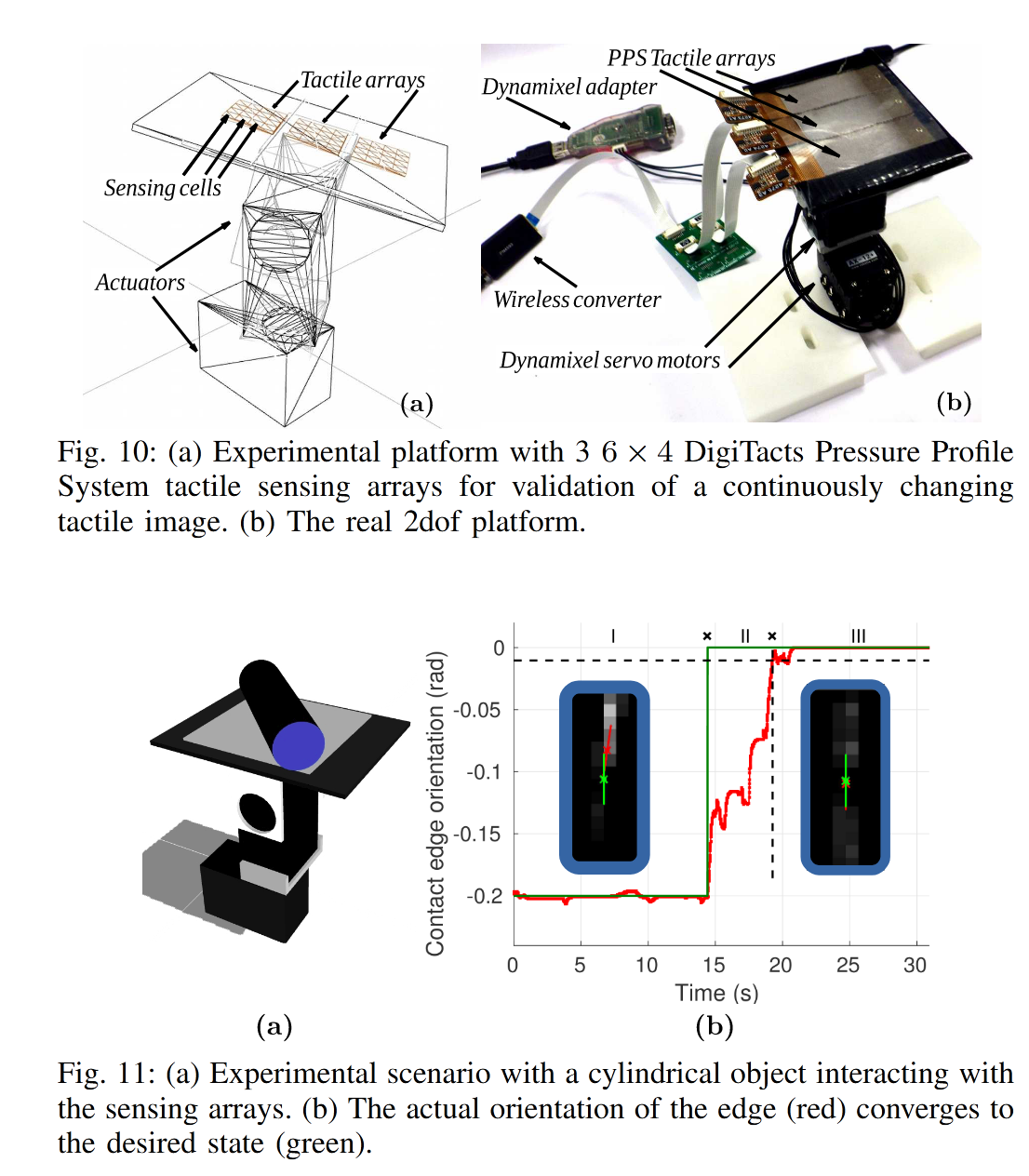
动态场景指 “接触力随时间变化”,实验平台是带 3 个 PPS 电容式传感器的 2 自由度云台(图 10):
- 平台参数:由 2 个 Dynamixel AX12 电机驱动,控制带宽 100Hz,传感器用三角化网格建模;
- 实验场景:圆柱形物体与传感器接触,通过 PID 控制器调整云台旋转角度,使触觉图像中的边缘方向对准期望方向(图 11 (a));
- 结果:图 11 (b) 中,红色线为实际边缘方向,绿色线为期望方向,5 秒后收敛(仅用比例增益,可通过调参加快响应)—— 证明仿真能处理动态接触,触觉伺服有效。
3. 复杂场景:笛卡尔空间机器人手的边缘伺服
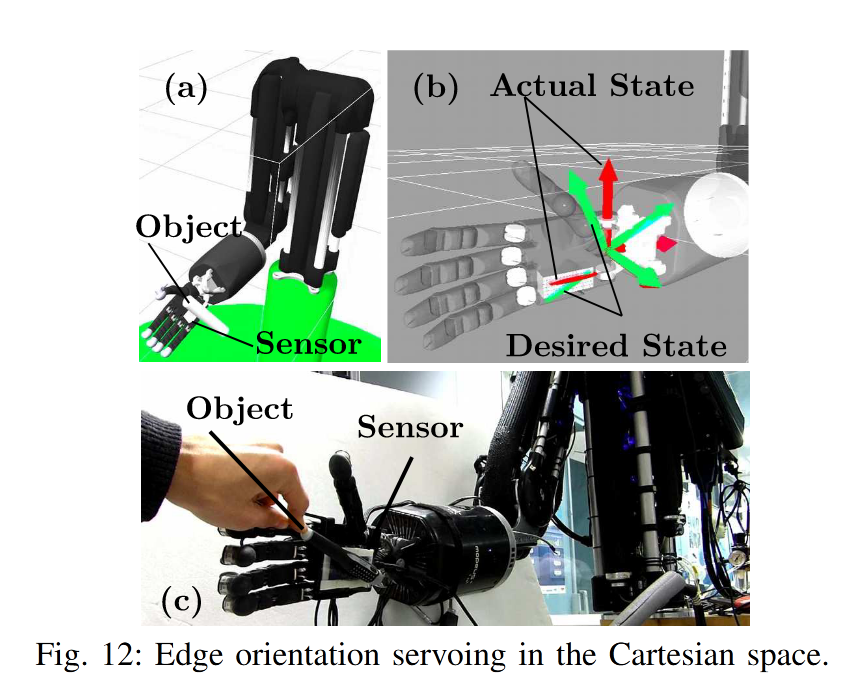
真实机器人操作在 6 维笛卡尔空间(3 平移 + 3 旋转),实验验证框架在该场景的适用性:
- 实验 setup:机器人手与圆柱形物体接触(图 12 (a)),从触觉图像中提取 “实际边缘方向”(红色)与 “期望边缘方向”(绿色)(图 12 (b));
- 应用价值:该仿真模型可用于 “人机协作抓取”(图 12 (c))—— 机器人手通过触觉反馈,自适应调整位姿,配合人类完成物体抓取。
七、CONCLUSION(结论)
1. 研究总结
作者在前期工作(如手内物体形状识别)中发现,仿真环境的局限在于 “缺乏触觉传感阵列模型”,本文针对性解决:
- 核心贡献 1:提出触觉传感阵列仿真方法 —— 结合 ODE 物理引擎的接触力与 “二维高斯 PSF”(参数来自实证),仿真与真实图像误差约 5%;
- 核心贡献 2:实现触觉伺服仿真 —— 基于 Weiss 和 PPS 传感器,验证了边缘定向控制在静态、动态、6D 空间的有效性。
2. 未来计划
下一步将升级框架,整合能 “直接计算表面形变” 的物理引擎,进一步提升仿真的真实性(当前方案未直接模拟表面形变,而是通过 PSF 间接模拟力扩散)。