【论文阅读】Segment Anything
论文链接: https://arxiv.org/abs/2304.02643
Code: https://github.com/facebookresearch/segment-anything
来源: 2023 IEEE/CVF International Conference on Computer Vision (ICCV)
1. 引言
基础模型在NLP中的成功: 大规模预训练的语言模型(如GPT系列)利用大量网络文本数据,展示了强大的zero-shot和few-shot学习能力,即在没有专门针对某个任务的训练的情况下,也能完成新任务。这些模型通过提示工程(prompt engineering),即设计特定的文本提示,引导模型产生符合需求的回答。模型规模和训练数据越大,其性能越好,有时甚至可以与专门调优的模型相媲美或优越。
扩展到计算机视觉: 在视觉领域,也开始尝试类似的方法。例如,CLIP和ALIGN训练了图文编码器,能够把图像和文本对应起来,通过给模型设计的文本提示,实现对新视觉概念的zero-shot识别。这些模型还能与其他模块结合,用于图像生成等任务。
尽管取得了进展,但计算机视觉的问题比自然语言更复杂,有些问题缺乏大规模标注数据。因此,本文的目标是:
- 打造一种基础模型,专用于图像分割
- 让它具有promptable(可用提示引导)和zero-shot泛化的能力
- 让模型能在没有针对特定任务的训练数据情况下,通过设计提示解决新任务
解决方案:
- 定义promptable segmentation的任务:给出任何提示(空间位置或文本),模型输出对应的有效分割掩码。这相当于让模型“听懂”各种提示,进行对象分割。
- 训练过程中,搭建“数据引擎”——利用已有模型协助收集和标注数据,不断反哺模型,扩大数据规模。
总结来说,通过借鉴语言模型的思路,旨在通过设计一个支持多种提示的图像分割模型,实现zero-shot和few-shot的泛化能力,并构建了相关的任务、架构和数据链路,以实现这一目标。
2. Segment Anything任务
灵感来源:模型的训练方式借鉴了NLP中的预训练方法,即通过预测下一词(token)来学习丰富的语义和结构信息,然后利用“提示(prompt)”方法在多种任务中实现零样本(zero-shot)适应能力。
任务定义:在视觉分割中,提示可以是前景/背景点、粗略的边界框或掩码、自由文本,或者任何指示需要分割内容的信息。目标是给定任何提示,模型都能输出一个“有效”的分割掩码。这里的“有效”意味着,即使提示模糊或可能对应多个对象(例如区分“衬衫”或“人”),输出也应合理对应至少一个对象。

预训练策略:这种提示可分割任务启发了一种自然的预训练算法:让模型在训练中模拟一系列提示(点、框、掩码)并将预测的掩码与标注的真实掩码进行比较。这种方法不同于传统的交互式分割(只在用户大量输入后预测掩码),其目标是让模型始终能对任何提示生成合理的“有效”掩码,即便提示模糊或多义。
零样本迁移能力:预训练使模型在推理(inference)时可以根据不同任务的提示,自动适应不同的分割需求。例如,利用已训练的边界框检测器提供定位信息,将其作为提示识别具体某类对象的实例。
区别于多任务模型:传统的多任务系统在训练和测试时执行固定任务(如语义分割、实例分割、全景分割等),而本文所描述的“提示可分割”模型的特点是训练后可以通过提示在不同任务间灵活转换,实现任务通用化,这极大增强了模型的适应性和扩展性。
3. Segment Anything模型
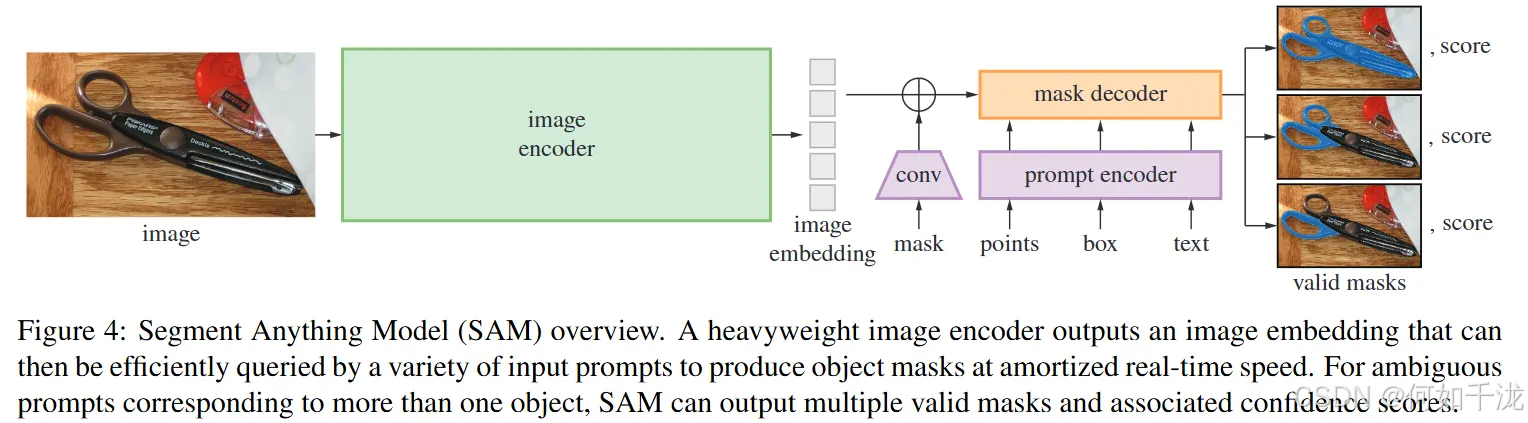
SAM基于Transformer视觉模型(如ViT)构建,经过特殊设计以实现实时性能。整体架构包括:图像编码器,提示编码器,和掩码解码器。图像编码器在每张图像上运行一次,然后生成高质量的图像嵌入,供后续步骤使用。提示编码器接受各种输入提示(点、框、文本、掩码)并将它们转换为嵌入表示。掩码解码器结合图像嵌入和提示嵌入,快速生成目标掩码。
-
图像编码器(Image encoder):
- 采用预训练的MAE(
Masked Autoencoder)结合Vision Transformer(ViT),经过微调以适应高分辨率输入。 - 作用:提取图像的深层次特征表示,只需一次运行,便于后续交互操作。
- 采用预训练的MAE(
-
提示编码器(Prompt encoder) 处理两类提示:
- 稀疏提示(Points, boxes, text):
- 点和框通过位置编码(positional encodings)加上学习的嵌入表示。
- 文本用现成的CLIP模型编码。
- 密集提示(Masks):
- 通过卷积进行嵌入,并与图像嵌入逐元素相加,形成丰富的提示信息。
- 稀疏提示(Points, boxes, text):
-
掩码解码器(Mask decoder):
- 负责将图像嵌入和提示嵌入结合起来,快速预测目标区域的掩码。
- 采用改良的
Transformer解码器:- 包含提示自注意力(
prompt self-attention) - 跨注意力(
cross-attention)——用于融合提示与图像特征 - 最后通过多层感知机(
MLP)和动态线性分类器,将输出映射到每个像素的前景概率。
- 包含提示自注意力(
-
解决歧义(Resolving ambiguity):
- 对于模糊或多义提示(如“shirt”可能指衣服或人),模型会预测多个掩码(一般为3个),代表不同的可能对象。
- 训练时,仅对最优掩码应用损失(如最小损失),为模型提供处理歧义的能力。
- 模型会为每个掩码预测置信度(估计IoU),以便排序。
-
效率(Efficiency):
- 设计目标是快速响应,给定预先计算的图像嵌入后,提示和掩码预测在浏览器(CPU上)大约50毫秒内完成,支持交互式应用。
-
训练(Losses and training):
- 使用
Focal loss和Dice Loss的线性组合,监督掩码预测。 - 模拟交互操作:在训练过程中,随机采样11轮提示,使模型学习在多轮交互中的表现。
- 使用
4. Segment Anything数据引擎
构建SA-1B数据集的三阶段的具体操作和技术细节:
- 手动标注阶段(Assisted-manual stage):
- 类似于传统的交互式分割方法,专业标注员使用由SAM驱动的浏览器工具,通过点击前景/背景点来标注掩码。
- 标注员还可以使用“画笔”和“橡皮擦”工具进行细化。
- 该过程实现了实时交互(利用预先计算的图像嵌入),提升效率。
- 标注忽略了语义限制,标注员可以自由标注“物体”和“材料”类别,但未收集名称或描述。
- 初始阶段,SAM基于公开数据集训练,随着数据量增加,模型在逐轮重新训练中不断优化,平均每个掩码标注时间从34秒缩短到14秒,比COCO标注快得多。
- 半自动阶段(Semi-automatic stage):
- 目标是增加掩码多样性,提升模型的“anything segmentation”能力。
- 先用训练好的边界框检测器自动识别“有信心的掩码”。
- 标注员在这些预填充掩码的基础上,补充未标注的对象。
- 通过反复训练SAM,模型性能逐步提升。
- 在这一阶段收集到约5.9百万掩码,总计约10.2百万掩码,平均每图标注72个掩码。
- 全自动阶段(Fully automatic stage):
- 利用经过大量多样化掩码训练、具备“模糊理解”能力(ambiguity-aware)的模型完全自动生成掩码。
- 以一个32×32的规则点阵作为提示,模型为每个点预测多个可能对应的掩码(包括子部分、部分和整体物体)。
- 利用IoU估算模块筛选可信且稳定的掩码(通过概率阈值和一致性检测)。
- 采用非极大值抑制(NMS)过滤重复掩码。
- 进一步利用重叠的放大图像裁剪,提升小目标掩码的质量。
- 最终,自动处理了全部11M图像,产生了总计约1.1亿个高质量掩码(SA-1B dataset)。
5. Segment Anything数据集
数据集概述:SA-1B包含11百万(11M)张高质量、多样化、已授权且保护隐私的图片,以及1.1十亿(1.1B)个自动生成的分割掩码。这些掩码由我们的“数据引擎”自动收集产生。该数据集旨在推动计算机视觉基础模型的发展。
- 图片方面:
- 这些图片由合作摄影师提供,具有高分辨率(平均约3300×4950像素),但大数据量带来存储和可访问性挑战。
- 为解决此问题,我们同时发布了缩小版(最短边设置为1500像素)的图片,虽然减小了分辨率,但仍然远比许多现有数据集(如COCO,约480×640像素)更加高清。
- 出于隐私和安全考虑,图片中的面孔和车牌已被模糊处理。
- 掩码方面:
- 绝大多数掩码(99.1%)由自动化模型生成。
- 这些掩码的质量是关键,我们通过随机抽取500张图片(约5万个掩码),让专业标注人员对自动生成的掩码进行细节修正,从而得到“专业校正”版本与自动掩码比较。
- 评估显示,94%的自动掩码与校正掩码的交并比(IoU)超过90%,而97%的超过75%%。这一水平与不同标注者之间的共识(85-91%)相当,表明掩码质量较高。
6. 零样本迁移实验
6.1 零样本单点有效掩模评估
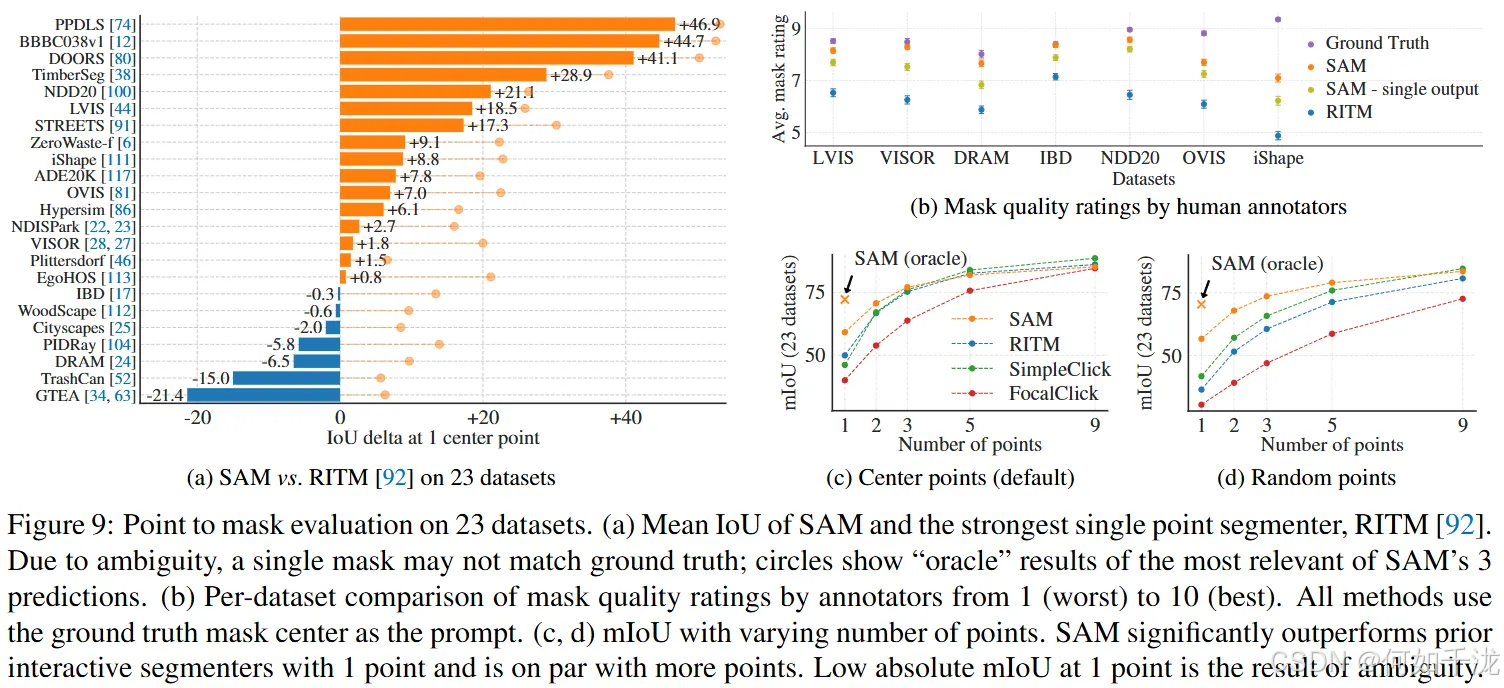
任务定义:用户只提供一个点作为提示,旨在分割对应的目标对象。这个任务本身具有不确定性,因为一个点可以对应多个对象。此外,大多数数据集中的标签没有列出所有可能的掩码,所以自动评价指标(如IoU)可能不够精确,因此作者采用了人类评估。人类评估的标准从1(无意义)到10(像素级完美)打分。
- 评估方式:
- 采样点:默认从目标掩码的“中心”位置采样,这样符合交互式分割的标准评测方法。
- 比较模型:除了SAM,还与强基线RITM进行了比较。SAM会生成多个候选掩码,但只用最有信心的那个掩码进行评估。
- 数据集:
- 使用一个包含23个多样化图像分布数据集的全套评估,包括常规指标(mIoU)和人类评分。
- 只用部分数据集进行人类评分,以免评估资源过大。
- 结果分析:
- 自动评估(mIoU):SAM在16个数据集上优于其他方法,最大提升到约47点IoU。在“oracle”条件下(选择最符合地面真实的掩码)SAM在所有数据集上都优于RITM,说明SAM的多掩码输出具有潜力,但存在歧义问题。
- 人类评分:无论在哪个数据集,评估者都认为SAM的掩码质量明显优于RITM,平均分在7到9之间,表明其生成的掩码大部分都可以认为是“合理、细节良好”。即使在自动指标表现较弱的数据集如DRAM和IBD中,人类评估仍给出较高评分。
- 变体比较:增加提示点数量(从1到9)会降低模型之间的差距,因为任务变简单。随机采样点时,SAM表现稳健,甚至优于基线方法。
6.2 零样本边缘检测
将SAM应用到零样本边缘检测任务中的方法和结果,具体如下:
- 方法(Approach):
- 任务目标:在经典的低级视觉任务——边缘检测上评估SAM的能力。
- 数据集:使用BSDS500数据集,该数据集包含手工标注的边缘真值图。
- 生成边缘图的过程:
- 首先,将一个16×16的规则网格(共256个点)作为输入提示点喂给SAM,每个点生成3个掩码,共计768个预测掩码。
- 移除冗余掩码:使用非极大值抑制(NMS)技术。
- 计算边缘图:对未阈值化的掩码概率图使用Sobel滤波算子产生边缘线,然后经过轻量级的后处理步骤(包括边缘NMS)得到最终的边缘图。
- 结果(Results):
- 可视化分析:尽管SAM没有专门训练进行边缘检测,却能够生成合理的边缘图。与真值边缘相比,SAM输出的边缘更丰富,包含许多未标注的细节边缘。
- 定量指标:主要指标是“在50%精度下的召回率(R50)”,即在不同的边缘阈值中达成50%假阳性比例时的召回率。结果显示,SAM在R50上表现较高,但在精确度方面有所欠缺,表现出一定的偏差。
- 性能方面,SAM略落后于专门训练的最先进边缘检测方法(如HED),但优于早期的零样本传输方法,显示其在无任务特定训练下也能产生具有参考价值的边缘图。
6.3 零样本目标检测
将SAM应用于中层视觉任务——目标提名(object proposal)生成,以及与基线方法的性能对比,具体内容如下:
- 方法(Approach):
- 任务目标:评估SAM在目标提名任务中的表现。这一任务在目标检测研究中非常重要,通常作为早期系统中中间步骤,旨在产生候选目标区域。
- 生成方法:
- 使用经过轻微修改的自动掩码生成流程。
- 将生成的掩码作为候选目标提名(proposals)输出。
- 评价指标:
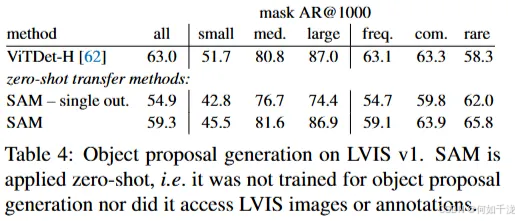
- 使用标准的平均召回率(AR)指标,计算在LVIS v1数据集上的表现。
- 选择LVIS数据集,是因为其类别丰富,具有挑战性。
- 基线系统:
- 使用由ViTDet(携带级联Mask R-CNN的ViT-H模型)实现的“强大基线”。
- 结果(Results):
- 基于ViTDet-H的检测器作为提名器(即DMP方法)表现最佳,能充分利用检测结果的优势。
- SAM:
- 在中等和大型目标、稀有类别目标以及常见类别目标上,性能优于ViTDet-H。
- 仅在小目标和频繁类别目标上略逊于ViTDet-H。原因是ViTDet-H在LVIS数据集训练,能学习到LVIS特有的类别偏差,而SAM作为零样本模型,没有在LVIS专门训练,因此在这些类别表现稍差。
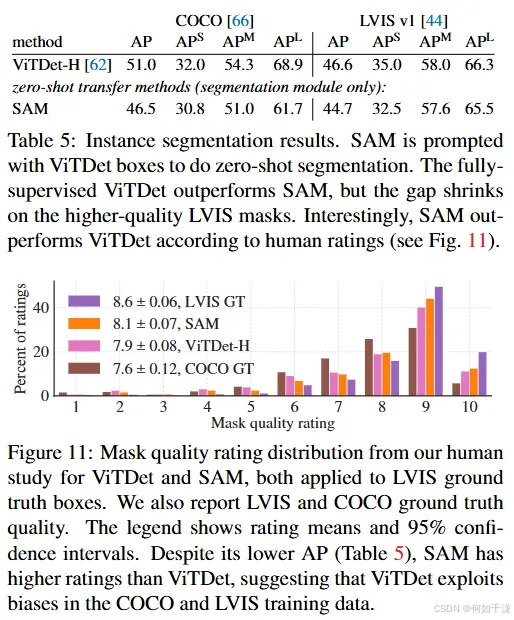
6.4 零样本实例分割
将SAM集成到更高层次的视觉系统中进行实例分割,以及对其性能和质量的评估,主要内容如下:
-
方法(Approach):
- 先运行一个目标检测器(这里使用之前提到的ViTDet)以检测出目标边界框。
- 将检测得到的边界框作为提示(prompt)输入到SAM中。
- 框架示例:通过“串联”检测器和SAM,实现实例分割。
-
结果(Results):在COCO和LVIS两个数据集上,比较了SAM和ViTDet预测的掩码
- Mask AP(平均精度)指标显示两者存在差距,ViTDet性能略优,但差距不大。
- 通过可视化分析,发现SAM的掩码边界更清晰、更具“锐度”。
- SAM在人类评价中持续优于ViTDet。
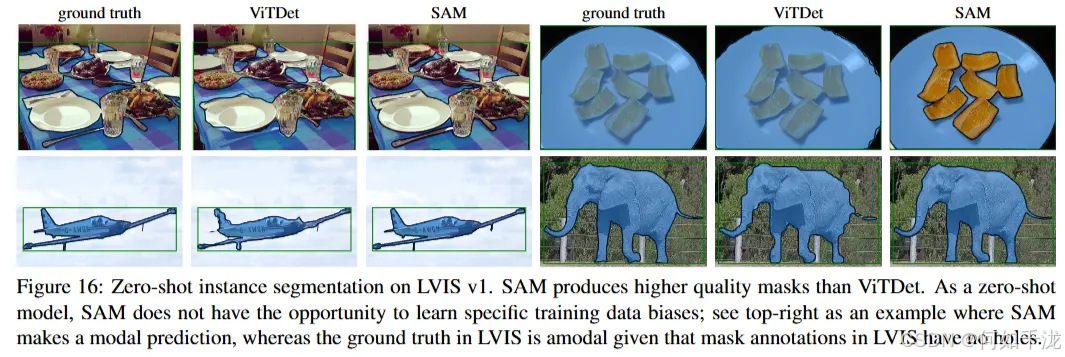
- 在COCO数据集上,由于掩码AP差距较大且真实标注质量较低(由人类研究支持),ViTDet可能学到了COCO掩码的特定偏差,即针对训练数据调优的“偏见”。SAM作为零样本方法,没有这些偏差,使得它在掩码质量上表现更佳(尤其在人类主观质量评估方面)。
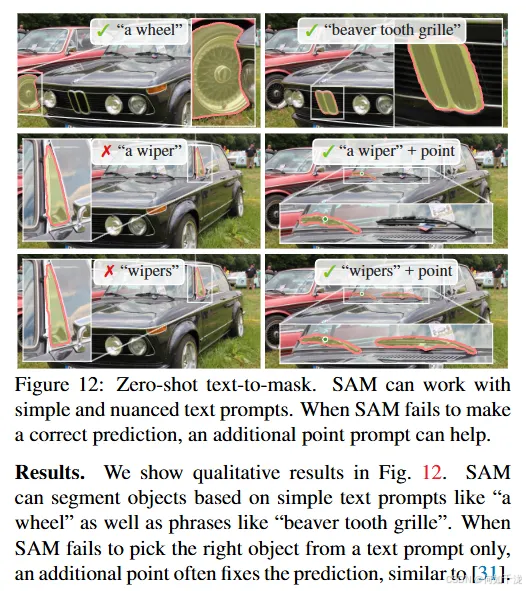
6.5 零样本文本分割
SAM在处理基于自由文本的对象分割任务中的尝试,从方法到结果如下:
-
方法(Approach):
- 任务:更高层次的目标——用自然语言文本描述进行对象分割。
- 样本准备:
- 使用手动收集的掩码(面积大于100²像素)对应的图像。
- 提取这些图像对应的CLIP(Contrastive Language-Image Pretraining)图像嵌入(image embeddings)。
- 训练过程:
- 在训练时,将从图像中提取的CLIP图像嵌入作为“prompt”输入给SAM(首次交互)。
- 关键点:因为CLIP的图像嵌入是与文本嵌入对齐训练的(即图像和文本在潜在空间中相互对应),
- 在推理阶段,将自然语言文本输入CLIP的文本编码器,得到对应的文本嵌入,再作为prompt输入给SAM。
-
结果(Results):
- SAM可以根据简单的文本如“a wheel”、“beaver tooth grille”进行对象分割。
- 当只用文本提示时系统偶尔会选错目标。
- 但加入额外的点(点提示)一般能改善预测表现,类似于其他研究中的“点提示”方法。
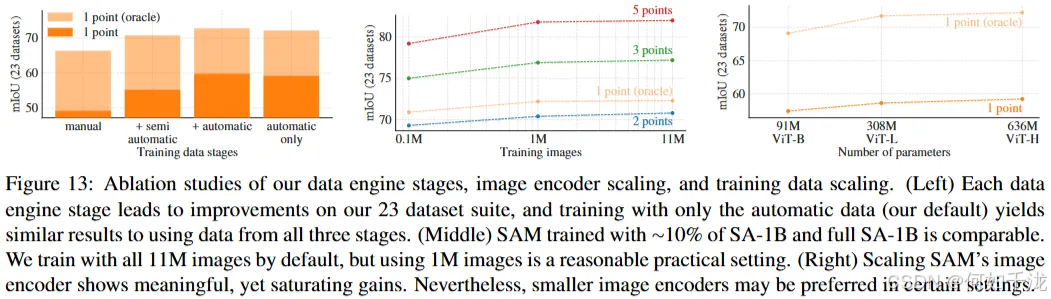
6.6 消融实验
对其训练流程和数据规模进行的消融实验(ablation studies),重点在于不同训练策略和数据量对SAM性能的影响。
- 单点提示协议的消融研究:
- 实验中采用单点(center point)提示,意味着每次只用一个点引导模型进行分割。
- 单点可能存在歧义,且该歧义可能未反映在 ground truth(标注的真实掩码)中,因为ground truth通常只有一个唯一的掩码。
- 偏差和“oracle”的引入:
- 由于SAM在“零样本(zero-shot)”的转移场景中,其最优预测(top-ranked mask)可能会偏离标注指南中定义的ground truth掩码。
- 因此,除了模型的top预测外,还报告“oracle”结果,即:在所有模型输出中选择最接近ground truth的掩码(最佳掩码),用于评估模型的潜力。
- 训练数据的阶段性(cumulative data from不同“阶段”):
- 展示在逐步加入不同阶段的训练数据后,模型的性能(以mIoU衡量)逐步提升。
- 每个阶段都带来性能的提升,说明数据的丰富性有助于模型表现。
- 自动掩码与手工/半自动掩码的比例:
- 训练数据中,自动生成的掩码远多于手动或半自动标注的掩码。
- 为了平衡数据,用手工和半自动掩码进行10倍的过采样(oversampling),取得最优效果。
- 但这使训练变得复杂。
- 只用自动掩码的简化策略:
- 为简化训练流程,作者也试验了只用自动掩码的方案。
- 结果显示,性能(mIoU)只略低于使用全部数据(差异约0.5),证明使用自动掩码训练效果还不错。
- 数据量影响:
- 完整的SA-1B数据集包含约11M图像,为了实验,均匀抽样得到不同规模的子集:1M和0.1M图像。
- 在仅使用0.1M(约10%的全部数据)时,模型性能明显下降。
- 使用1M图像(大约10%数据规模)时,模型性能(mIoU)接近完整数据集的表现。
A. Segment Anything模型细节
SAM(Segment Anything Model) 中 图像编码器(Image encoder) 和 提示编码器(Prompt encoder) 以及轻量级的 掩码解码器(Mask decoder) 的设计与功能,具体如下:
-
图像编码器(Image encoder):
- 作用:将输入图像转换为C×H×W的图像嵌入(image embedding)。这是一种紧凑的表征,用于后续的提示融合和掩码预测。
- 实现方案:采用预训练的MAE(Masked Autoencoder)的Vision Transformer(ViT),特别是ViT-H/16模型,进行了最小改动,支持高分辨率输入(1024×1024像素)。
- 处理流程:
- 输入图像经过缩放和补边,使分辨率为1024×1024,并生成大小为64×64的特征映射(因为采用了一次64×下采样)。
- 提取的特征通过1×1卷积将通道数减少到256,随后通过3×3卷积保持256通道,每个卷积层后接层归一化(layer normalization)。
- 重要性:该图像嵌入在整个流程中只需计算一次,避免重复计算以支持实时交互。
-
提示编码器(Prompt encoder):
- 作用:将不同类型的提示(稀疏提示:点和框;密集提示:掩码;文本提示)编码成向量,以便与图像嵌入结合。
- 具体实现:
- 点:用位置编码(positional encoding)叠加到点的坐标上,再加上表示“前景”或“背景”的可学习嵌入。
- 框:用两个边界的角点位置编码,加上对应的“左上角”或“右下角”嵌入。
- 文本:用CLIP的文本编码器处理。
- 密集掩码(mask prompt):在分辨率比输入图像低4倍的空间上输入,然后通过两个步幅为2的卷积逐步缩小4倍,最后用1×1卷积映射到256维。若无掩码提示,则加入表示“无掩码”的嵌入。
-
轻量级掩码解码器(Mask decoder):
- 作用:结合图像嵌入和提示嵌入(tokens)预测目标掩码。
- 结构:
- 使用类似Transformer的解码器:包含自注意(self-attention)、跨注意(cross-attention)和MLP(多层感知机)模块。
- 在解码过程中,将一个“输出”token(类似于分类任务中的[cls] token)加入提示集合。
- 每一层解码器包括:
- 自注意:在tokens间进行
- 跨注意:用tokens(查询)对图像嵌入(作为key和value)进行
- MLP:更新tokens信息
- 反向跨注意:用图像嵌入(查询)对tokens(作为key/value)进行更新
- 多层解码后,将更新的图像嵌入进行放大(Upsample 4×),并通过MLP和点乘操作,预测出最终的掩码。
-
Transformer的嵌入维度:
- 所有Transformer层(包括自注意和交叉注意层)中的嵌入空间使用的向量维度为256。这意味着每个token(如提示向量或图像特征)在空间中表示为256维的向量。
-
MLP块的规模与应用范围:
- Transformer中的MLP(多层感知机)块具有较大的内部维度,为2048。这意味着每个MLP层的隐藏层有2048个神经元,增加模型的表达能力。
- 但为了计算效率,这个大规模的MLP仅应用于prompt tokens(提示token),而提示token一般相对较少(通常少于20个),因此在实际中处理量有限。
-
交叉注意层中的通道维度缩减:
- 在交叉注意(cross-attention)层中,处理的是64×64的图像嵌入(即空间尺寸,空间区域为4096个位置)。
- 为了提高计算效率,将查询(queries)、键(keys)和值(values)中的通道数减半,从256减到128。这是因为在这种注意机制中,将通道数减半可以显著减少矩阵乘法的计算量,同时对性能影响较小。
-
注意力头数:
- 所有注意力层(self和cross)都使用8个注意力头(heads),这允许模型在不同子空间中并行关注不同的特征,从而提升建模能力。
-
反卷积(transposed convolution)用于上采样:
- 用于将输出的图像嵌入放大(Upsample)以恢复到更高的空间分辨率。
- 具体操作:使用2×2的转置卷积核(kernel size = 2×2),步长为2(stride = 2),以实现放大2倍的空间尺寸(比如64×64变为128×128)。
- 输出通道数:设为两层,分别为64和32通道,这决定了上采样后图像的深度(特征维度)。
-
激活函数:使用GELU(高斯误差线性单元)激活,确保非线性变换。
-
转置卷积层之间还加入了层归一化(layer normalization),以稳定训练过程并改善模型性能。