路径平滑连接方法
问题描述:
当目标路径 A 和 B 在过渡处存在横向偏差时,可通过以下方法实现平滑连接,避免控制模块出现方向盘抖动。
解决方案思路:
解决方案思路:
路径平滑:在两条路径的过渡段之间插入一条平滑的曲线,使得横向偏差被平滑过渡。常用的曲线有多项式曲线(如五次多项式)、贝塞尔曲线、样条曲线等。
控制方案:采用基于路径跟踪的控制算法,如纯跟踪(Pure Pursuit)或模型预测控制(MPC),并在过渡段考虑横向误差和航向误差的平滑变化。
具体步骤:
一、路径平滑方法
假设我们有两段路径,分别用路径A和路径B表示,它们在过渡点附近有横向偏差。我们可以在两段路径之间设计一个过渡路径,将两条路径连接起来。常用方法:
使用多项式插值(如三次样条或五次多项式)来连接两个路径段。五次多项式可以保证位置、速度和加速度(即曲率)的平滑性。
设定过渡段的起始状态(从路径A的终点取状态:位置、方向、曲率)和终止状态(到路径B的起点取状态),然后利用五次多项式生成一条平滑的过渡曲线。
使用贝塞尔曲线或样条曲线。贝塞尔曲线可以通过控制点来调整曲线形状,且计算效率高。
二、控制方案
在生成平滑路径后,我们需要一个控制方案来保证车辆能够平滑地跟踪这条路径,特别是在过渡段。
纯跟踪控制(Pure Pursuit):
纯跟踪控制基于车辆当前位姿和路径上的目标点(look-ahead point)来计算前轮转角。通过调整前瞻距离,可以控制跟踪的平滑性。
在过渡段,可以自适应地调整前瞻距离:在曲率较大的地方减小前瞻距离以提高跟踪精度,在曲率较大的过渡段,减小前瞻距离可以避免过冲,但可能会引起抖动,所以需要平衡。也可以采用变前瞻距离的纯跟踪算法。
模型预测控制(MPC):
MPC通过求解一个有限时域的最优控制问题,能够考虑车辆的动力学约束和路径跟踪要求。由于MPC可以处理路径的曲率变化和车辆状态,因此在过渡段可以生成平滑的控制指令。
在MPC的代价函数中,我们可以加大对于转向变化率的权重,以抑制方向盘的抖动。
斯坦利控制(Stanley):
斯坦利控制是一种基于横向误差和航向误差的控制方法,通过非线性反馈律计算转向角。为了平滑过渡,可以对斯坦利控制律进行改进,例如对误差进行滤波或引入积分项以减少稳态误差。
三、综合考虑
为了最大限度地减少方向盘抖动,我们可以在路径平滑和控制算法两个方面同时采取措施:路径平滑:确保过渡段的曲率连续且变化平缓,避免曲率的突变。
控制方案:采用预测控制(如MPC)或者改进的纯跟踪控制,并考虑以下因素:
- 在控制算法中加入转向角变化率的限制,避免方向盘快速变化。
- 使用滤波器(如低通滤波器)对计算出的转向角指令进行平滑处理。推荐方案:
路径平滑:使用五次多项式曲线连接两段路径,保证位置、方向和曲率的连续。
控制方案:采用模型预测控制(MPC),并在优化问题中考虑转向角变化率的约束,同时可以在控制输出后加入一阶低通滤波器进行平滑。
详细说明:
路径平滑步骤:
假设路径A的终点状态为(x0, y0, θ0, k0),路径B的起点状态为(x1, y1, θ1, k1)。我们使用五次多项式曲线来连接,参数为:
x(s) = a0 + a1*s + a2*s^2 + a3*s^3 + a4*s^4 + a5*s^5
y(s) = b0 + b1*s + b2*s^2 + b3*s^3 + b4*s^4 + b5*s^5
其中s为弧长参数,归一化到[0,1]。根据起点和终点的边界条件(位置、方向、曲率)求解系数。控制方案(MPC):
建立车辆动力学模型(如自行车模型),设计MPC控制器,其优化目标包括:
- 最小化路径跟踪的横向误差和航向误差。
- 最小化控制量(转向角)及其变化率。
约束包括:
- 车辆动力学约束。
- 转向角幅度和转向变化率的约束。通过以上方法,可以实现在过渡段的平滑转向,避免方向盘抖动。
1. 具体实施步骤
1.1 离线路径预处理
检测过渡段:识别路径A和B的连接点
曲线拟合:插入平滑过渡曲线(长度5-15米)
曲率检查:确保最大曲率在车辆可行范围内
1.2 在线控制策略
def smooth_transition_control(current_pose, path_A, path_B):# 1. 路径选择逻辑if distance_to_transition < threshold:active_path = generate_transition_curve(path_A, path_B)else:active_path = current_active_path# 2. MPC路径跟踪control_input = mpc_controller(active_path, current_pose)# 3. 转向指令后处理smoothed_steering = low_pass_filter(control_input.steering)return apply_rate_limit(smoothed_steering)2. 关键参数整定建议
2.1 平滑过渡参数
过渡段长度:车速×2.0-3.0秒
最大曲率变化率:<0.1 m⁻¹/m
转向角速率限制:<15°/s
2.2 控制器参数
MPC预测时域:3-5秒
控制权重:Δδ权重 > δ权重
滤波器截止频率:2-5 Hz
3. 验证方法
3.1 仿真测试
阶跃响应测试:验证抗抖动性能
曲率连续测试:检查路径平滑性
极端工况测试:大偏差情况下的稳定性
3.2 实车调试
逐步增加车速:从低速到高速验证
传感器反馈监测:监控实际转向角波动
主观评价:驾驶员舒适度评估
推荐方案组合
首选:Clothoid曲线过渡 + MPC控制
备选:五次多项式过渡 + 自适应纯跟踪/斯坦利控制这种方案能有效解决方向盘抖动问题,同时保证路径跟踪精度和乘坐舒适性。
一、几何曲线连接法
1. 贝塞尔曲线插值
- 原理:通过调整控制点生成光滑曲线,三阶贝塞尔曲线可保证曲率连续(C²),五阶贝塞尔曲线可实现曲率导数连续(C³)。
- 实现步骤:
- 确定偏差点 P₀(路径 A 终点)和 P₃(路径 B 起点),在其外侧添加辅助控制点 P₁和 P₂,使 P₀-P₁-P₂-P₃形成控制多边形。
- 确保连接处切线方向一致(P₁-P₀与路径 A 末端切线平行,P₂-P₃与路径 B 起始切线平行)。
- 通过调整 P₁、P₂的位置优化曲线形状,避免曲率突变。
- 优势:灵活适配复杂几何约束,支持多段曲线拼接,适合局部路径规划。
- 应用案例:自动驾驶中车道变换场景,通过两段三阶贝塞尔曲线实现车道中心线的平滑过渡。
2. Clothoid 曲线(欧拉螺线)
- 原理:曲率随弧长线性变化,满足 G² 连续性(位置、切向、曲率连续),符合车辆转向时的角加速度特性。
- 参数设计:
- 前段 Clothoid 曲线曲率从 κ₀线性增加至中间曲率 κ_m,后段从 κ_m 线性减少至 κ₁(路径 B 曲率)。
- 通过 Fresnel 积分计算曲线位移和转向角,确保终点坐标与路径 B 精确对齐。
- 优势:显著降低高速行驶时的横向加速度变化率(jerk),提升乘坐舒适性。
- 工程实现:利用牛顿迭代法求解非线性方程组,确定两段 Clothoid 的弧长 L₁、L₂和中间曲率 κ_m。
3. 三次样条插值
- 原理:通过分段三次多项式保证 C² 连续性,插值点处的一阶导数(切向)和二阶导数(曲率)连续。
- 约束条件:
- 路径 A 终点和路径 B 起点的位置、切向、曲率必须作为边界条件输入。
- 中间节点的曲率变化率需平滑过渡,避免出现拐点。
- 优势:数学表达式简洁,计算效率高,适合实时性要求较高的场景。
- 局限性:若原始路径曲率变化剧烈,可能需要增加插值节点以避免振荡。
二、参数化优化方法:
1. Frenet 框架解耦优化
- 步骤:
- 将笛卡尔坐标系下的路径偏差转换为 Frenet 坐标系中的横向位移 d 和纵向位移 s。
- 对横向位移 d 进行五次多项式优化,确保 d、d'(横向速度)、d''(横向加速度)在过渡段连续。
- 结合车辆动力学约束(如最大侧向加速度)调整优化权重,生成平滑的横向轨迹。
- 优势:将二维路径规划问题分解为独立的一维优化,降低计算复杂度。
- 应用场景:高速公路弯道过渡段,通过 Frenet 框架生成符合向心加速度限制的轨迹。
2. 带约束的优化算法
- 目标函数:
- 其中,κ 为曲率,ω₁-ω₃为权重系数,分别控制路径平滑度、曲率变化率和避障优先级。
- 约束条件:
- 几何约束:路径必须经过 P₀和 P₃,且与路径 A、B 的切线方向一致。
- 动力学约束:曲率 κ ≤ 1 / 最小转弯半径,横向加速度 a_y ≤ μ・g(μ 为路面附着系数)。
- 求解方法:采用序列二次规划(SQP)或内点法迭代求解最优路径参数。

三、控制策略协同:
1. 预瞄 - 跟随 PID 控制
- 原理:通过预瞄距离 L_p 预测未来路径偏差,结合 PID 控制器动态调整方向盘转角。
- 偏差计算:
- 侧向偏差 e_y = 车辆当前位置到预瞄点的横向距离。
- 航向偏差 e_θ = 车辆航向与预瞄点切线方向的夹角。
- 控制律:
- 其中,K_p、K_d、K_i 为 PID 参数,K_θ 为航向补偿系数。
- 参数调整:
- 增大 K_p 可减小稳态偏差,但可能导致超调;增大 K_d 可抑制振荡,提升响应速度。
- 预瞄距离 L_p 应根据车速调整(L_p = v・T_p,T_p 为预瞄时间常数)。
2. 模型预测控制(MPC)
- 原理:在有限时域内预测车辆状态,滚动优化生成最优控制序列,同时考虑路径平滑性和约束。
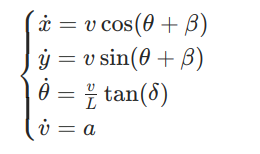
- 状态方程:
- 其中,β 为质心侧偏角,L 为轴距,a 为纵向加速度。
- 优化目标:
- 最小化路径跟踪误差、方向盘转角变化率(避免机械磨损)和能耗。
- 约束条件包括转向角范围、轮胎侧偏刚度限制等。

四、工程实践要点:
误差容限设计:
- 根据车辆类型和行驶速度,设定最大允许横向偏差(如 ±0.2m),超过时触发路径重规划。
- 采用滑动窗口滤波处理传感器数据,减少高频噪声对路径生成的影响。
多算法融合:
- 全局路径规划采用 A或 Hybrid A生成粗略路径,局部路径优化使用 Clothoid 曲线或五次多项式。
- 结合 Reeds-Shepp 曲线处理需要倒车的场景,如停车场入库。
实时性保障:
- 采用并行计算架构(如 GPU 加速)提升优化算法速度,确保控制周期≤50ms。
- 对计算资源受限的嵌入式系统,可预先离线计算常见过渡段的最优参数表。
五、典型应用场景:
高速公路匝道连接:
- 使用 Clothoid 曲线连接主线与匝道,曲率从 0 线性增加至匝道设计值,确保车辆以恒定角加速度转向。
- 配合预瞄 - 跟随 PID 控制,将方向盘转角变化率限制在 0.5°/s 以内,避免乘客晕车。
城市道路交叉口转向:
- 采用五阶贝塞尔曲线平滑连接直道与弯道,通过优化控制点使曲率变化率≤0.02 rad/m²。
- 结合 MPC 预测对向车辆轨迹,动态调整路径以保持安全距离。
工业 AGV 路径纠偏:
- 当激光雷达检测到路径偏差时,触发三次样条插值生成修正路径,同时通过 PID 控制器调整电机转速差。
- 预瞄距离设为 AGV 轴距的 1.5 倍,确保转向平稳性。
通过上述方法,可在保证路径几何连续性的同时,满足车辆动力学约束,有效抑制方向盘抖动。实际应用中需根据具体场景选择合适的算法组合,并通过实车测试优化参数,以达到最佳控制效果。