虚拟机管理程序(Hypervisor)
第一部分:核心概念解析
1)什么是虚拟机管理程序(Hypervisor)?
简单来说,Hypervisor 是一种在单一物理硬件上创建并运行多个独立、隔离的虚拟计算机(称为虚拟机,VM)的软件
- 类比: 你可以把你的个人电脑想象成硬件。在没有 Hypervisor 的情况下,你只能安装一个操作系统,比如 Windows。但如果你安装了 VMware Workstation 或 VirtualBox,你就可以在这台电脑上同时运行多个“虚拟电脑”,比如一个 Ubuntu Linux 和一个 macOS。Hypervisor 就是汽车领域的“VMware”,但它更加强调实时性、安全性和可靠性
- 核心目标: 隔离(Isolation) 和 整合(Consolidation)
○ 隔离: 一个虚拟机崩溃、被恶意攻击或出现故障,不会影响运行在同一硬件上的其他虚拟机。这是汽车功能安全(ISO 26262)的基石
○ 整合: 将原本需要多个独立电子控制单元(ECU)完成的功能,整合到一台更强大的中央计算机上(如车载主控 SOC),从而降低硬件成本、重量、布线复杂性和功耗
2)为什么车机需要 Hypervisor?(解决的核心问题)
传统汽车有几十个甚至上百个分散的 ECU。但随着汽车智能化的发展,出现了两个需求截然不同的领域:
- 信息娱乐系统(IVI):
○ 需求: 丰富的用户体验、强大的应用生态、高速网络连接、多媒体处理
○ 典型操作系统: Android Automotive OS (AAOS)。因为它基于 Linux,拥有强大的应用和开发生态,非常适合做娱乐、导航等复杂应用 - 数字仪表盘 & 车辆控制:
○ 需求: 极高的实时性、确定性和可靠性(安全关键型)。例如,车速、转速、故障报警必须毫秒不差地显示,与车辆底盘、动力系统的通信不能有任何延迟或卡顿
○ 典型操作系统: QNX 或 实时 Linux(RT-Linux)。特别是 QNX,它是一个微内核、高实时的操作系统,在车载安全关键领域有数十年的成熟应用
矛盾出现了: 我们不能把 AAOS 和 QNX 简单地安装在同一台电脑上,因为:
- AAOS(基于 Linux)不是一个硬实时系统,它可能会因某个应用卡顿而影响整个系统
- 让安全关键的仪表盘暴露在可能来自 AAOS 上某个 App 的安全风险下是绝对不允许的
解决方案: Hypervisor 将一块强大的车载 SOC(如高通 SA8155P、SA8295P)虚拟化成多个“虚拟的电脑”,让 AAOS 和 QNX 能够同时、独立地运行在同一块芯片上
第二部分:车机上的典型架构
下图清晰地展示了 Hypervisor 在车机中的核心作用:
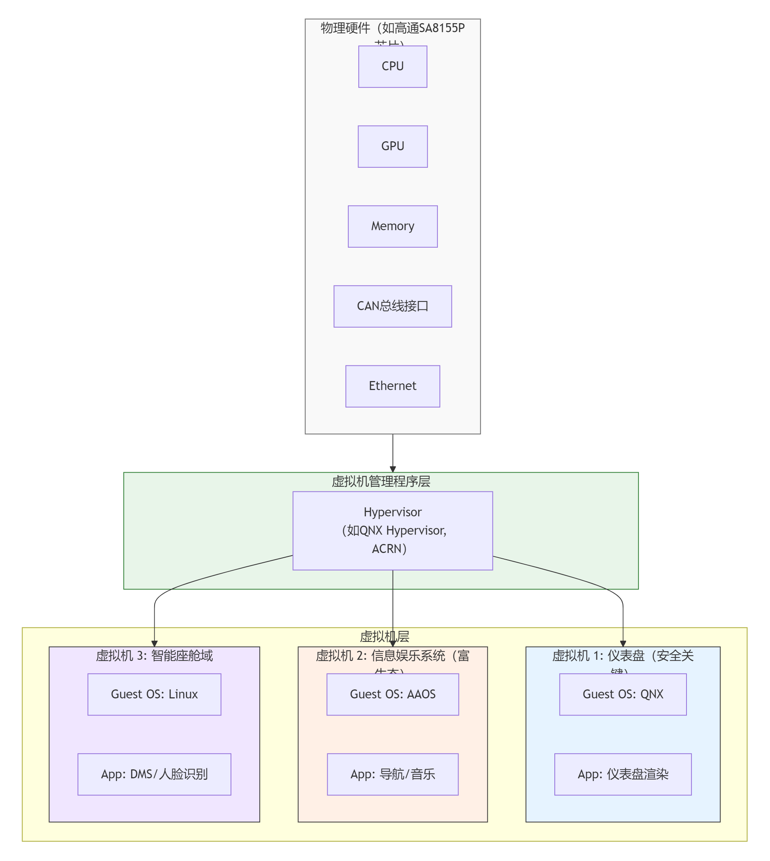
如上图所示:
- Hypervisor 直接运行在硬件之上,负责管理和分配所有硬件资源
- 每个虚拟机(VM) 都认为自己独占一台完整的电脑
- 资源分配: Hypervisor 会精确地为每个 VM 分配 CPU 核心(例如,2个核心给AAOS,2个核心给QNX)、内存块、GPU 处理时间片以及 I/O 设备(如显示屏、CAN 控制器)
第三部分:跨虚拟机通信(IVC)机制
既然 AAOS 和 QNX 被严格隔离了,它们之间又该如何通信呢?例如:
- AAOS 上的导航App需要将导航信息(如下一个转弯提示)发送到仪表盘上显示
- 车辆传感器数据(如车速)需要从 QNX 控制的 CAN 总线传递给 AAOS 上的应用
这就需要 跨虚拟机通信(Inter-VM Communication, IVC) 机制。主要有两种主流方式:
1)虚拟设备模拟(例如 virtio)
这是最常用和高效的方式
- 原理: Hypervisor 在后台模拟一个标准的硬件设备,比如一块“虚拟网卡”(virtio-net)或一个“虚拟串口”(virtio-console)
- 过程:
① 前端驱动(Front-end Driver): 运行在客户机操作系统(如 AAOS 和 QNX)内核中。它像操作真实网卡一样操作这个虚拟设备
② 后端驱动(Back-end Driver): 运行在Hypervisor或一个特权虚拟机(如 Dom0)中。它接收来自所有前端驱动的数据
③ 通信通道: 前后端驱动通过 Hypervisor 提供的共享内存(Shared Memory)和中断信号等机制进行高速数据交换 - 类比: 就像在同一个房间里有两台物理上独立的电脑,但 Hypervisor 给它们之间接上了一根虚拟的网线。AAOS 和 QNX 可以通过标准的网络套接字(Socket)编程在这根“虚拟网线”上进行通信,非常方便
2)共享内存(Shared Memory)
这是一种更底层、更高效的机制
- 原理: Hypervisor 在物理内存中划出一块特定的区域,并配置好内存管理单元(MMU),使得两个或多个虚拟机都能直接访问这块内存
- 工作方式:
① 发送方(如 QNX)将数据写入共享内存
② 发送方通过一个虚拟中断(Virtual Interrupt) 通知接收方(如 AAOS):“数据准备好了”
③ 接收方 收到中断后,直接从共享内存中读取数据 - 优点: 延迟极低,吞吐量高,因为没有数据拷贝开销
- 缺点: 需要双方虚拟机上的应用或驱动协同工作,处理好同步和互斥问题(如信号量),防止数据竞争
第四部分:对开发者的意义
作为应用开发者,你通常不会直接与 Hypervisor 交互,但需要了解这个底层架构,因为它影响了你的开发:
- 上下文意识: 你需要清楚你的应用运行在哪个虚拟机(AAOS)上,它需要与哪个虚拟机(如 QNX 仪表盘)的服务进行通信
- 通信 API:
○ 如果车厂采用了 virtio-net 方案,那么跨域通信就类似于网络通信。你可能会使用 TCP/IP 或 UDP 套接字,或者更高层的 RPC 框架(如 gRPC)来与仪表盘服务交换数据
○ 如果车厂提供了 自定义 SDK,他们会封装底层的共享内存或虚拟设备通信,为你提供简单的 Java/Kotlin API(例如DashboardManager.sendNavigationInfo()) - 性能与安全考量:
○ 通信会有微小的延迟,在设计交互时需考虑
○ 通信通道是受严格控制的,你不能随意访问另一个域的所有数据,必须遵循车厂定义的安全策略和接口
总结
Hypervisor 是现代软件定义汽车实现“硬件整合”与“功能安全隔离”的关键技术。 它让 AAOS 的丰富生态和 QNX 的高可靠性得以在同一硬件平台上和谐共存。而 跨虚拟机通信机制 则是连接这些“信息孤岛”的桥梁,使得座舱内的各个部分能够协同工作,为用户提供无缝的智能体验