机器视觉系统中工业相机的常见类型及其特点、应用
本文主要就工业相机的分类及其应用场景进行阐述,帮助了解工业相机的更多信息。
1.1、工业相机是什么
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。其成像原理与小孔成像类似,但更为复杂。当被摄物体反射的光线通过工业镜头折射后,会投射到相机的感光传感器上,这个感光传感器通常是电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)。
1.2、工业相机的主要特点
- 高可靠性:工业相机设计用于长时间连续工作,能够在高温、高湿、震动等恶劣环境下稳定运行。
- 高性能:提供高分辨率、高帧率、高动态范围和高灵敏度,满足精密检测和高速捕捉的需求。
- 模块化设计:工业相机通常采用模块化设计,便于集成到各种工业设备和系统中。
- 丰富的接口:支持多种接口类型(如GigE、USB3.0、Camera Link、CoaXPress等),满足不同带宽和距离的需求。
- 灵活的配置:支持多种触发模式、曝光控制和图像处理功能,适应不同的应用场景。
1.3、工业相机的分类
- 按图像传感器类型:分为 CCD工业相机和 CMOS工业相机。
- 按输出色彩:分为彩色工业相机和黑白(单色)工业相机。
- 按扫描方式:面阵工业相机和线阵工业相机。
- 按输出信号方式分:模拟工业相机、数字工业相机。
- 按响应频率范围分:可见光(普通)相机、红外相机、紫外相机等。
- 按照光谱波段数量来分,可分为高光谱相机和多光谱相机。
- 按照成像维度分:2D工业相机和3D工业相机
- 特殊工业相机:偏振工业相机。
1.3.1 CCD 相机和 CMOS 相机
工业相机主要基于CCD(电荷耦合器件)或CMOS(互补金属氧化物半导体)芯片。CCD是目前机器视觉中最常用的图像传感器,它集光电转换、电荷存贮、电荷转移和信号读取于一体,是典型的固体成像器件。CMOS图像传感器则将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上。两者在性能和应用方面各有优势:
CCD 相机成像质量高,噪声低,在低光照环境下表现出色,但成本较高、功耗大,用于要求高图像质量和低噪音的应用;CMOS 相机成本低、功耗低、数据读取速度快,不过图像质量相对略逊一筹,适用于高速和低功耗应用。
1.3.2黑白和彩色相机
黑白工业相机直接将光强信号转换成图像灰度值,生成的是单色灰度图像。彩色工业相机能获取景物中红、绿、蓝三个分量的光信号,输出彩色图像。彩色相机能够提供比黑白相机更多的色彩信息。
彩色相机能获取物体丰富的色彩信息,适用于对颜色有要求的检测,如食品外观检测、印刷品色彩检测等;黑白相机则对光线更敏感,在检测物体的灰度差异、纹理细节方面表现较好,常用于对精度要求高的尺寸测量、缺陷检测等场景。
1.3.3面阵和线阵相机
面阵相机是每次采集若干行的图像并以帧方式输出。其应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵相机的优点是可以获取二维图像信息,测量图像直观。缺点是像元总数多,而每行的像元数一般较线阵少,帧速度受到限制。
线阵工业相机,顾名思义是成像传感器呈“线”状的。虽然也是二维图像,但极宽,几千个像素的宽度,而高度却只有几个像素的而已。线阵工业相机具有高扫描频率和高分辨率。其典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动, 利用一台或多台工业相机对其逐行连续扫描,以达到对其整个表面均匀检测。可以对图像逐行进行处理,或者对由多行组成的面阵图像进行处理。另外线阵工业相机非常适合测量场合,这要归功于传感器的高分辨率。一般在两种情况下使用这种相机:
1. 被测视野为细长的带状,多用于滚筒上检测的问题。
2. 需要极大的视野或极高的精度。
面阵相机一次获取一帧完整图像,适用于静态物体或运动速度较慢的物体检测;线阵相机每次获取一行图像,通过物体与相机的相对运动来构建完整图像,常用于高速运动物体的检测和高精度的一维测量,如印刷品的在线检测、金属板材的表面检测等。
TDI工业相机
TDI作为特殊的线阵工业相机,是一种采用时间延迟积分(Time Delay Integration,TDI)技术的线阵工业相机。其工作原理如下:
1.光电荷产生:当光线照射到 TDI 传感器的第一行像素上时,产生初始的光电荷。
2.电荷转移与累积:在下一个时钟周期,这些电荷被精确地转移到第二行像素,同时第一行像素继续接收新的光子并产生新的电荷。这个过程在随后的像素行中持续进行,每一行都在接收新的光子并累积来自前一行的电荷。
3.信号读出:当电荷到达最后一行像素时,累积的信号被读出,形成最终的图像信号。通过这种方式,来自同一位置的信号被连续地叠加在一起,增加了总信号量,从而增强了图像的信噪比和灵敏度。
应用领域
半导体行业:用于半导体晶圆检测、芯片封装检测等,能够检测出晶圆上的微小缺陷、划痕、杂质等,确保产品质量。
平板显示器(FPD)检测:可对液晶显示器、有机发光二极管显示器等的生产过程进行检测,如检测面板上的像素缺陷、线路短路、断路等问题。
电子制造:用于印刷电路板(PCB)的外观检测、元器件的贴装检测等,能够快速检测出 PCB 上的焊接缺陷、元件缺失、极性错误等问题。
物流与包装:在物流分拣过程中,可用于识别货物的标签、条形码、外形尺寸等信息,实现自动化的分拣和包装;还可以检测包装的完整性、封口质量等。
纺织与服装:用于纺织品的疵点检测、面料的花纹识别、服装的尺寸测量等,提高纺织品和服装的质量控制效率。
1.3.4数字工业相机和模拟工业相机
数字工业相机和模拟工业相机两者只在输出信号上有区别。
模拟工业相机输出的是模拟信号,数字工业相机输出的是数字信号。模拟工业相机的A/D 转换是在工业相机之外进行的,数字工业相机的A/D 转换是在工业相机内部完成的。
标准的模拟相机分辨率很低,帧率固定。模拟相机必须搭配具有A/D转换功能的模拟采集卡,经过模拟采集卡转换为数字信号进行存储或者处理。模拟信号可能会由于工厂内其他设备(比如电动机或高压电缆)的电磁干扰而造成失真,随着噪声水平的提高模拟相机的动态范围(原始信号与噪声之比)会降低。动态范围决定了有多少信息能从相机传输给计算机。
数字相机输出的是数字信号,数字信号不受电噪声影响,因此数字相机的动态范围更高,能够向计算机传输更精确的信号。
1.3.5可见光相机、红外相机、紫外相机
1.3.5.1光谱范围与成像原理
- 可见光工业相机
光谱范围:主要覆盖人眼可见的光谱范围,大约在390nm至780nm之间。
成像原理:通过镜头捕捉目标物体的可见光图像,并转换为电信号进行存储或传输。
- 红外工业相机
光谱范围:覆盖红外光谱范围,通常分为近红外(NIR,750nm~1400nm)、短波红外(SWIR,1400nm~3000nm)、中波红外(MWIR,3000nm~8000nm)、长波红外(LWIR,8000nm~14000nm)。
成像原理:利用红外探测器接收目标物体发出的红外辐射,并将其转换为电信号进行成像。红外成像不依赖于颜色,可以高精度地可视化任何物体。
- 紫外工业相机
光谱范围:覆盖紫外光谱范围,大约在10nm至400nm之间,工业上常用的紫外波长包括365nm和395nm。
成像原理:通过紫外镜头捕捉目标物体发出的紫外光,并利用紫外探测器将其转换为电信号进行成像。紫外相机通常用于检测使用可见光无法检测到的特征。

1.3.5.2技术特点
可见光工业相机:
分辨率高,色彩还原能力强。适用于常规的视觉检测和图像分析。
红外工业相机:
能够穿透烟雾、灰尘等可见光无法穿透的介质。对温度敏感,适用于热成像和夜视。
紫外工业相机:
对表面缺陷、荧光物质和紫外标记敏感。适用于高精度检测和特殊材料分析。
1.3.5.3应用场景
可见光工业相机:广泛用于安防监控、影视制作、交通管理、环保监测、工业检测与机器视觉、军事侦察等领域,如产品外观缺陷检测、交通违章记录。
红外工业相机:用于热成像、红外测温、夜视、隐身检测、军事侦察、工业温度监测等,如电力设备的热故障检测、夜间安防监控。
紫外工业相机:常用于高分辨率视频显微镜、电晕检测、半导体检测、无损检测、塑料和橡胶制品检测等,如检测半导体晶圆表面的细微缺陷。
1.3.6高光谱和多光谱工业相机
1.3.6.1光谱分辨率与波段数量
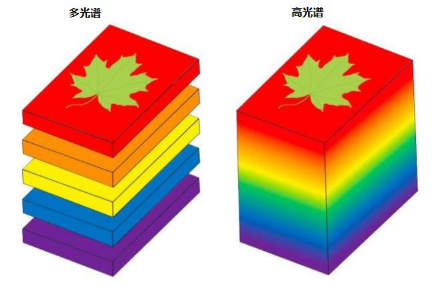
高光谱相机:光谱分辨率极高,通常能记录超过 100 个波段,甚至可达数百个至上千个波段,可在可见光、近红外、短波红外等光谱范围内对物体进行连续光谱成像,获取目标物在非常多窄波段下的反射、透射或辐射信息,相邻波段的间隔非常小,一般为 1nm 左右,甚至更小5。
多光谱相机:光谱分辨率相对较低,波段数量较少,一般在 2 到 100 个之间,其波段宽度相对较宽,通常为 10-100nm。
1.3.6.2成像原理与设备结构
高光谱相机:常见的成像技术包括光栅分光、声光可调谐滤波分光、棱镜分光、芯片镀膜等,通过这些技术将光按照波长进行分离,并逐点或逐行获取物体的反射或透射光,设备结构较为复杂。
多光谱相机:主要有三种类型,多镜头型多光谱照相机具有 4-9 个镜头,每个镜头各有一个滤光片,分别让一种较窄光谱的光通过,多个镜头同时拍摄同一景物;多相机型多光谱照相机是由几台照相机组合在一起,各台照相机分别带有不同的滤光片,分别接收景物的不同光谱带上的信息,同时拍摄同一景物;光束分离型多光谱照相机采用一个镜头拍摄景物,用多个三棱镜分光器将来自景物的光线分离为若干波段的光束,用多套胶片分别将各波段的光信息记录下来。
1.3.6.3应用场景
高光谱相机:适用于需要高精度光谱分析的场景,如工业检测中的微小缺陷检测、材料成分的精确分析、食品药品的质量检测和安全评估等;在科研领域,用于地质勘探、生物医学研究、环境科学研究等,以获取详细的光谱信息来进行深入分析。
多光谱相机:适用于对光谱分辨率要求不高,但需要快速获取大面积、多波段信息的场景,如农业领域的大面积农作物生长状况监测、森林资源调查;在安防监控中用于目标识别和场景分析;在遥感领域用于土地利用分类、城市规划等。
多光谱工业相机可以看看DALSA的Genie Nano C800。
1.3.7偏振工业相机
偏振工业相机是一种利用光的偏振特性进行成像的工业相机。
工作原理
光的偏振特性:光是一种电磁波,具有偏振特性。自然光在垂直于传播方向的平面内包含着一切可能方向的振动,且在任一方向上的振幅相同。当光经过物体表面反射、折射、散射等作用后,其偏振状态会发生改变,如变成线偏振光、圆偏振光或椭圆偏振光等。
相机检测原理:偏振工业相机通常在镜头前或传感器上安装偏振片等光学元件,通过这些元件来选择性地让特定偏振方向的光通过并被传感器接收。根据 Stokes 矢量计算偏振度原理,平行光源照射在被测物表面形成光的反射,反射光透过偏振片后,相机的图像传感器可从多个方向采集到图像数据,最终结合成的偏振度图像。