欧拉动力学方程的推导(持续更新)
目录
前言:
一、叉乘的数学知识
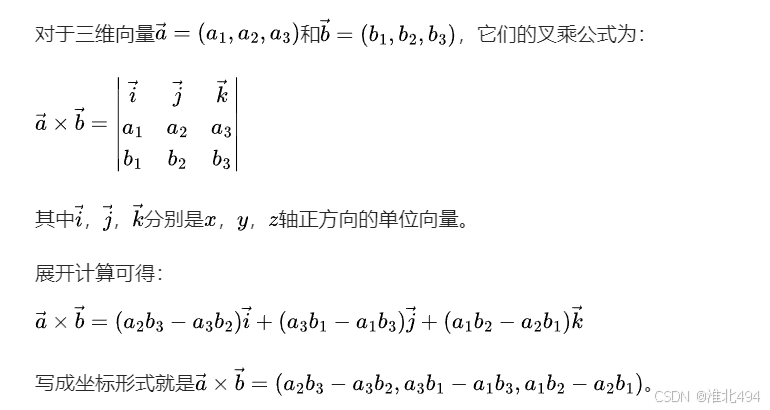
1.两个向量叉乘
2.矩阵和向量叉乘
3.向量和矩阵叉乘
二、刚体动力学下的欧拉方程
前言:
这两天在看”Thrust Mixing, Saturation, and Body-Rate Control for Accurate
Aggressive Quadrotor Flight“这篇论文的时候,他给出无人机的动力学模型,对于欧拉动力学方程我不是很理解,所以在网上搜索了相关资料,现在在这里记录一下。
参考链接:
https://www.zhihu.com/question/327324524/answer/3405589606
一、叉乘的数学知识
1.两个向量叉乘
豆包生成的。
2.矩阵和向量叉乘
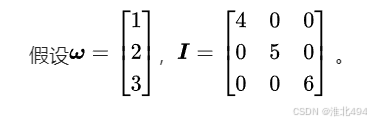
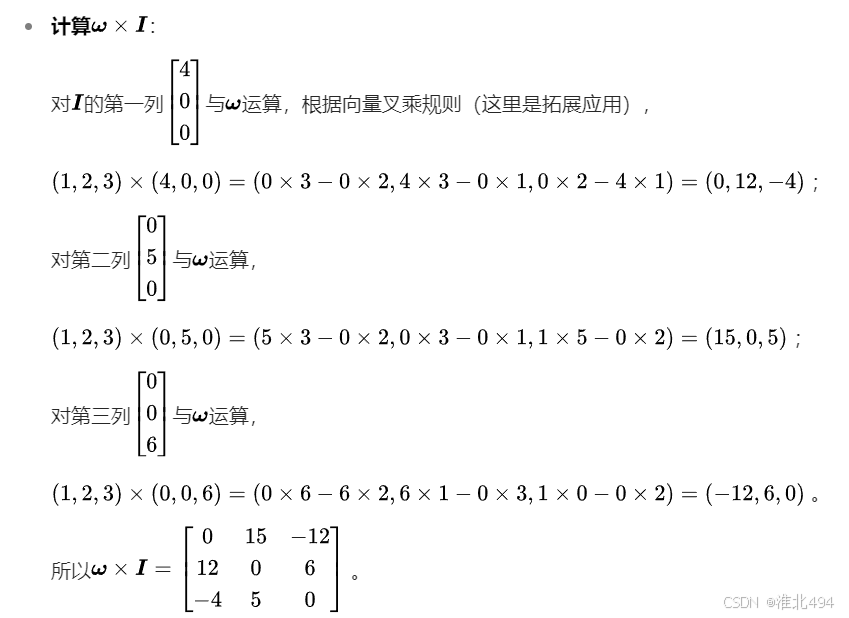
3.向量和矩阵叉乘
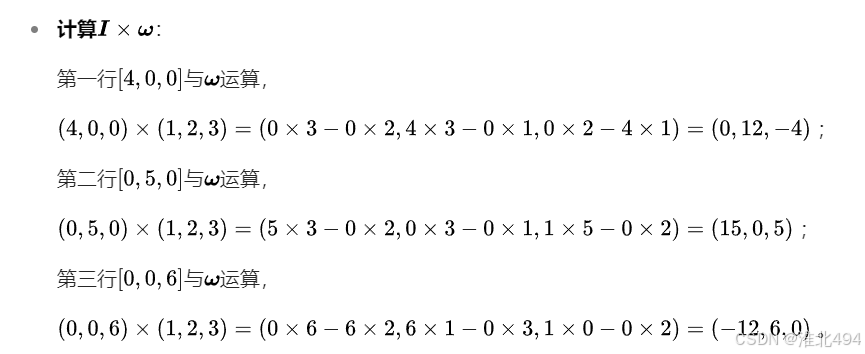
之后将这三行加起来,得到一个向量。
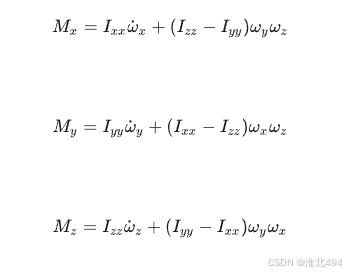
二、刚体动力学下的欧拉方程
1. 角动量公式
其中H代表角动量,I是一个3×3的惯性矩阵,w代表角速度,是一个三维列向量。
![]()
2.对角动量求导即为力矩
对角动量求导,则可得出
![]()
3.上式等式右边的第二项无需再化简,第一项需进一步处理。首先考虑惯性张量:
这个需要考虑一下,
4.对惯性张量求导,运用链式法则:
5.一般认为惯性张量的各分量不会发生变化,,对于这个ei和ej来说,它们是机体坐标系的各轴的单位向量,他们的变化率等于此时觉得角速度叉乘他们,这个公式,想一下很有道理,因为当角速度和这个单位向量很近的时候,那么这个单位向量就不转,这个容易直观的理解。负号是ej的叉乘顺序变了所有得到的。
6.接下来呢,由于叉乘的线性性质,可以将w写在外面,之后Iij写在里面。于是就有
7.你看求和符号里面,是不是就是惯性矩阵本身,于是可以写成
8.对于I这个矩阵,可以拆分成(I1, I2, I3),之后I×W就可以写成(I1×W) + (I2×W)+ (I3×W),之后会发现这个向量与W正交,所以和W的数量级为0,所以可以得到下面的式子。
9.所以说最后的式子

10.当惯性张量中非对角的惯性积为零时,可以写成