摄影网站开发的背景西安网站 技术支持牛商网
目录
- 1.摘要
- 2.问题定义
- 3.求解算法
- 4.结果展示
- 5.参考文献
- 6.算法辅导·应用定制·读者交流
1.摘要
在国际海事组织(IMO)温室气体减排战略和双碳目标的推动下,海上风电成为可再生能源的重要组成部分,对海上风力涡轮机(OWTs)的定期检查受到越来越多的关注。自主水下航行器(AUV)显著提高了检查效率,但当前技术限制了其独立完成长距离和复杂任务的能力。因此,本文提出了一种船载AUV协同模式,可在更短时间内覆盖更大范围的检查区域,优化了船舶航线并安排AUV投放与接取时间。针对大规模实例,本文采用基于约束自适应大邻域搜索(ALNSCP)启发式算法,通过模拟实验,验证了协同模式和解决方法在提高检查效率方面的优势。
2.问题定义
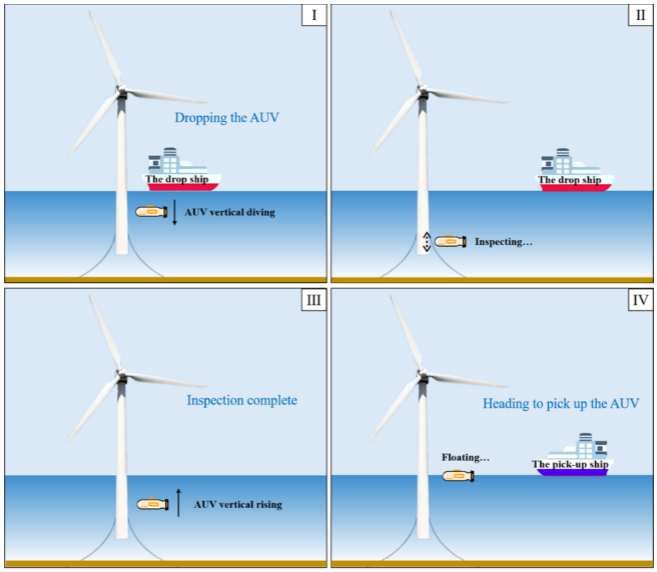
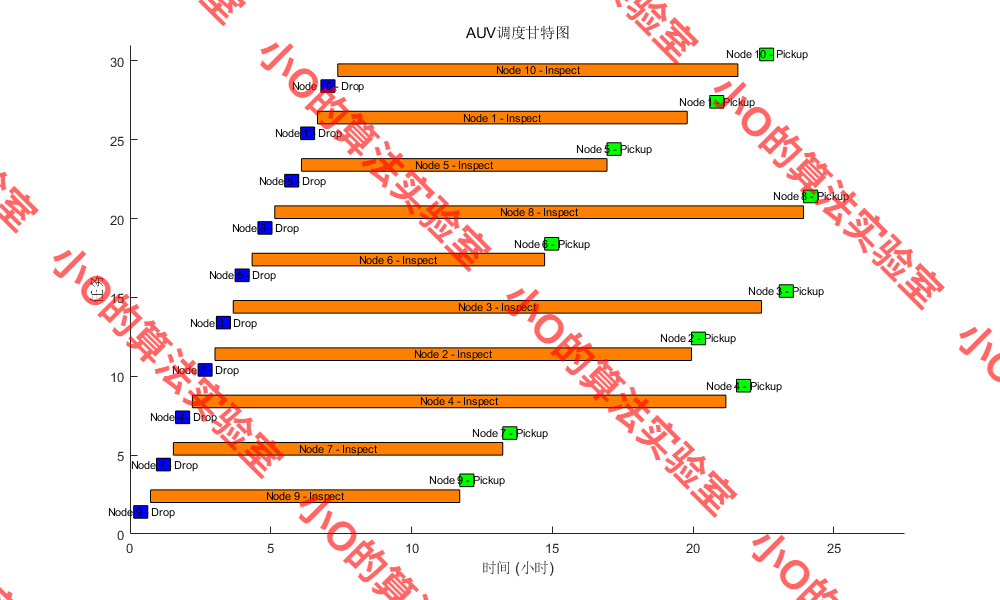
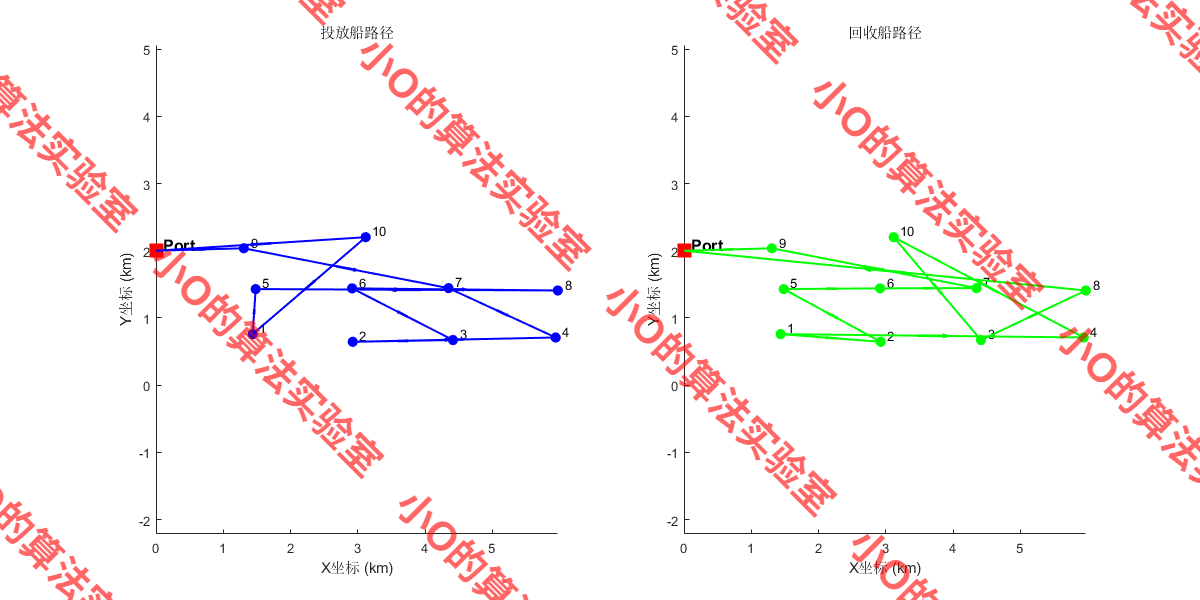
在海上风电场中,目标检查节点位于水下指定深度。采用两艘船只,投放船将AUV从港口运送至目标节点并投放,AUV自主执行检查任务后上浮等待接取船接取。由于AUV在水面保持稳定,接取船需在规定的漂浮时间内到达并接取AUV。AUV的调试操作在投放和接取过程中完成,且所需时间相同。船只完成所有任务后返回港口。
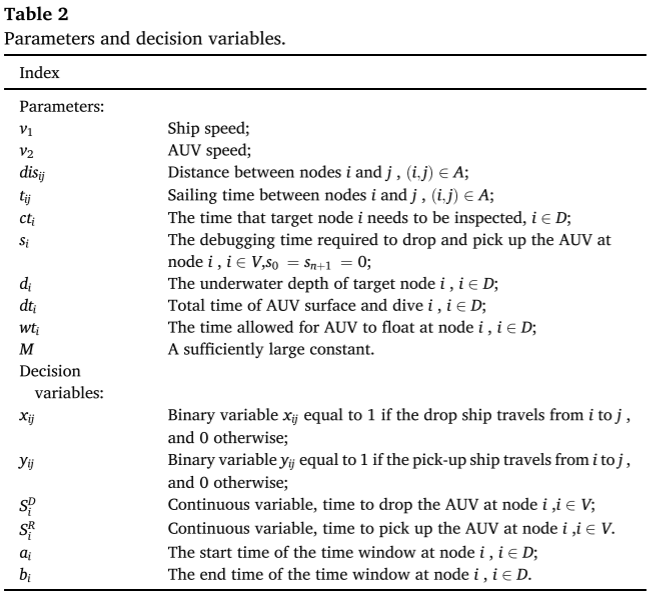
任务在有向图G(V,A)G(V,A)G(V,A)上定义,其中V={0,1,…,n+1}V=\{0,1,\ldots,n+1\}V={0,1,…,n+1}是所有节点的集合。节点0和节点n+1n+1n+1是两个港口的副本,分别代表每艘船的起始和结束位置。D={1,…,n}D=\{1,\ldots,n\}D={1,…,n}是需要检查服务的目标节点集合。对于每个i∈Di\in Di∈D ,已知其深度did_idi ,并且 AUV的浮出水面和潜入时间为dt=2di/v2dt=2d_i/v_2dt=2di/v2。弧集A={(i,j)∣i,j∈V,i≠j}A=\{(i,j)|i,j\in V,i\neq j\}A={(i,j)∣i,j∈V,i=j} 不包括(0,n+1)。对于每条弧(i,j)∈A(i,j)\in A(i,j)∈A ,已知距离dijd_{ij}dij,而行驶时间tij=dij/v1t_{ij}=d_{ij}/v_{1}tij=dij/v1。
δ+(i)={j∣(i,j)∈A}\delta^+(i)=\{j|(i,j)\in A\}δ+(i)={j∣(i,j)∈A}是从节点iii出发的所有弧的终点节点集合。类似地,δ−(i)=\delta^-(i)=δ−(i)=
{j∣(j,i)∈A}\{j|(j,i)\in A\}{j∣(j,i)∈A}是所有以节点jjj为起点的弧的起点节点集合。
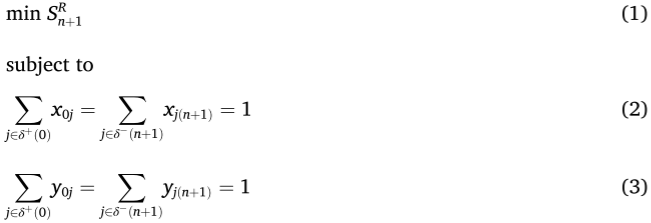
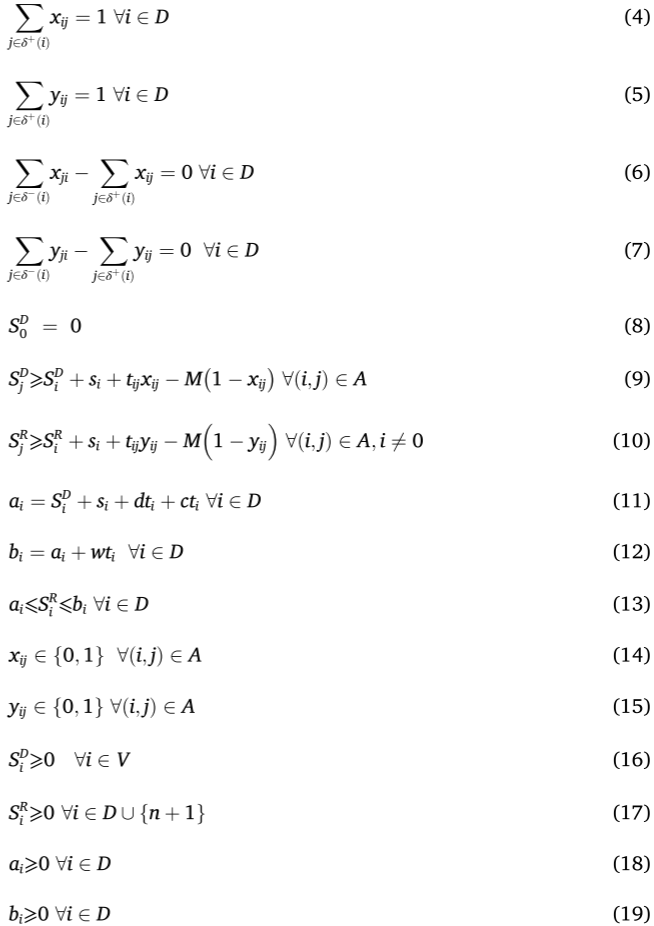
目标函数 (1) 最小化接取船完成任务后返回港口的时间。约束条件 (2)-(3) 确保船只从港口出发并返回;(4)-(5) 保证每个目标节点仅被访问一次;(6)-(7) 为流量平衡约束;(8)-(10) 定义船只和AUV的出发与接取时间;(11)-(12) 确定接取时间窗口;(13) 确保AUV接取时间符合时间窗口;(14)-(19) 定义变量的取值范围。
3.求解算法
Sörensen(2015)和Aranha等(2022)批评了“新颖”基于隐喻的元启发式算法的泛滥,强调了基于邻域框架的重要性。作为一种先进的基于邻域的元启发式算法,ALNS通过算子竞争广泛探索新的邻域,同时精确优化现有解,表现出色,特别是在VRPMS和载人-无人机路径规划问题。
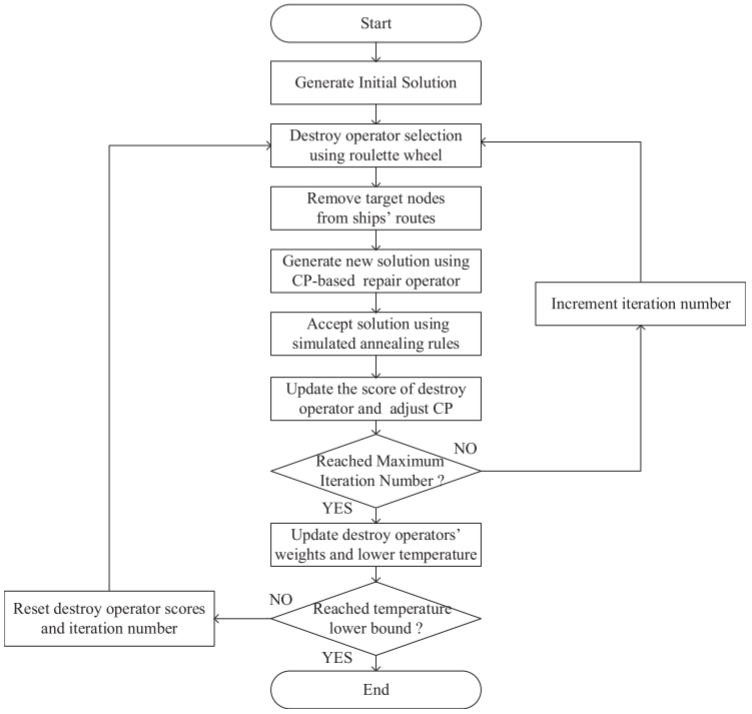
ALNSCP结合了约束传播技术(CP),解决了节点之间复杂同步导致的新可行路径构建问题。通过动态调整破坏算子的频率,ALNSCP通过多种破坏和修复算子提供了高效的检查方案。
可行初始解构建
由于投放船和接取船的航线之间存在严格的时间同步要求,并且没有现成的方案可供参考,引入命题1来高效地构建可行的初始航线。
命题1: 根据 ct+dt+sct + dt + sct+dt+s 递增排序目标节点所得的序列,是投放船和接取船可行航线。

破坏算子
为了在新的邻域中找到更好的解,破坏算子每次迭代从当前投放船和接取船航线中移除给定数量qqq目标节点,这里采用三种破坏算子:同步节点随机移除、同步节点Shaw移除、同步节点最差移除。
基于约束编程修复算子
本文规划问题具有两个关键特点:(1)严格的访问顺序,要求接取船在投放船到达后的一定时间内重新访问OWT位置;(2)封闭的动态时间窗约束,AUV接取时间窗口的上下限随着投放时间的变化而动态调整,必须严格满足,这导致每个目标节点的插入可能会显著改变整个检查计划中AUV的投放和接取时间。约束编程(CP)非常适合解决此类问题,特别是在具有同步约束的路径规划中表现出色(Rousseau等,2013),CP的约束传播能力可用于进一步缩小搜索空间的可行区域。
自适应CP搜索时间限制和移除节点数量
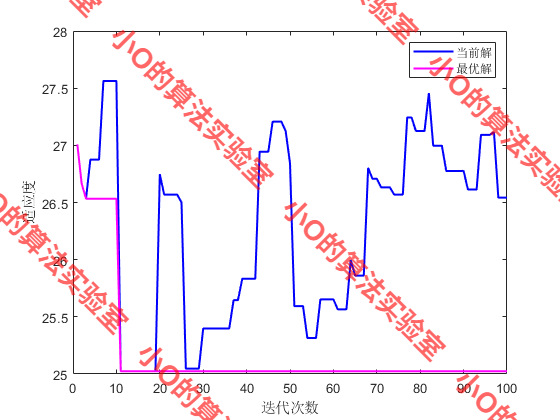
我们引入自适应qqq和TimeLimitTimeLimitTimeLimit组合提升ALNSCP的效果,该调整与每个破坏运算符结合,根据解的质量动态评分、加权和选择组合。
4.结果展示
5.参考文献
[1] Hu Y, Han X, Wang M, et al. Optimization of ship-deployed AUVs synergisticscheduling for offshore wind turbines underwater foundations inspection[J]. Computers & Operations Research, 2025, 181: 107080.
6.算法辅导·应用定制·读者交流
xx