【第25话:路径规划】自动驾驶路径规划概念与理论介绍
自动驾驶路径规划概念与理论介绍
一、核心概念
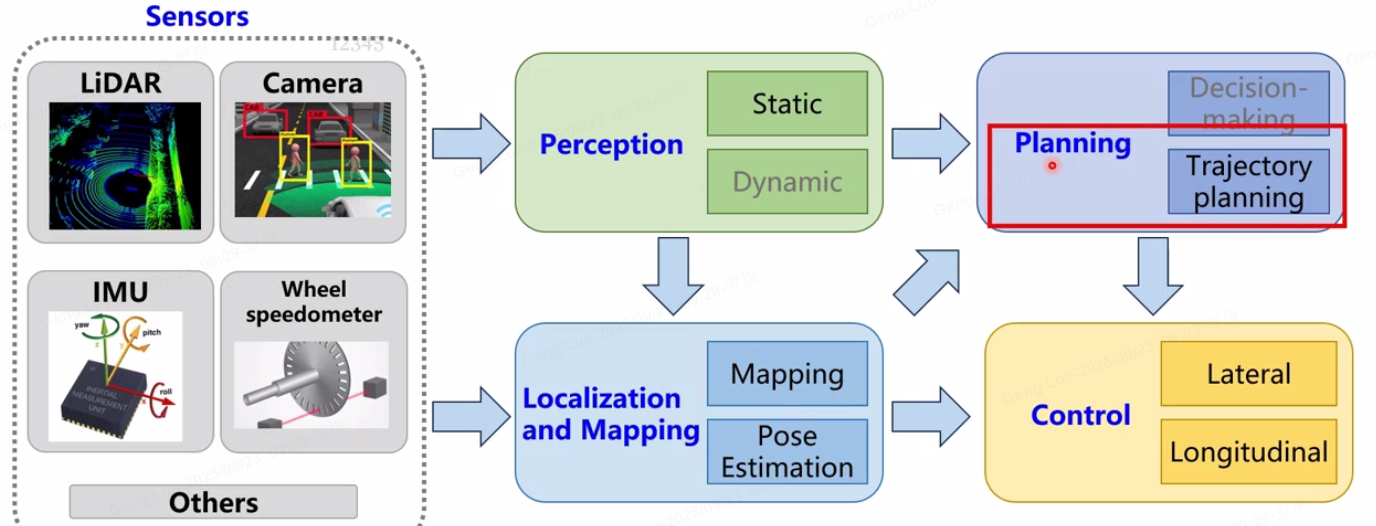
路径规划是自动驾驶系统的决策核心,指在动态环境中为车辆寻找最优运动轨迹的过程。其核心目标包括:
- 安全性:避免碰撞(dobs>dsafed_{obs} > d_{safe}dobs>dsafe)
- 高效性:最小化路径长度(Lpath→minL_{path} \rightarrow minLpath→min)
- 舒适性:降低急加速/转向(x¨,θ¨→0\ddot{x}, \ddot{\theta} \rightarrow 0x¨,θ¨→0)
- 可行性:满足车辆动力学约束(δmax,amax\delta_{max}, a_{max}δmax,amax)
目标函数=ω1⋅Lpath+ω2⋅Ttravel+ω3⋅Jcomfort
\text{目标函数} = \omega_1 \cdot L_{path} + \omega_2 \cdot T_{travel} + \omega_3 \cdot J_{comfort}
目标函数=ω1⋅Lpath+ω2⋅Ttravel+ω3⋅Jcomfort
其中ωi\omega_iωi为权重系数,JcomfortJ_{comfort}Jcomfort为舒适性代价函数。
二、关键技术框架
-
环境建模
-
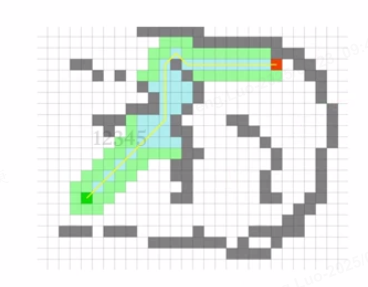
栅格地图:将环境离散为m×nm \times nm×n网格
-
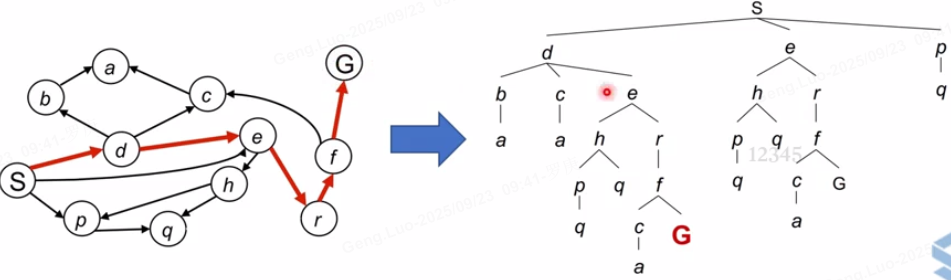
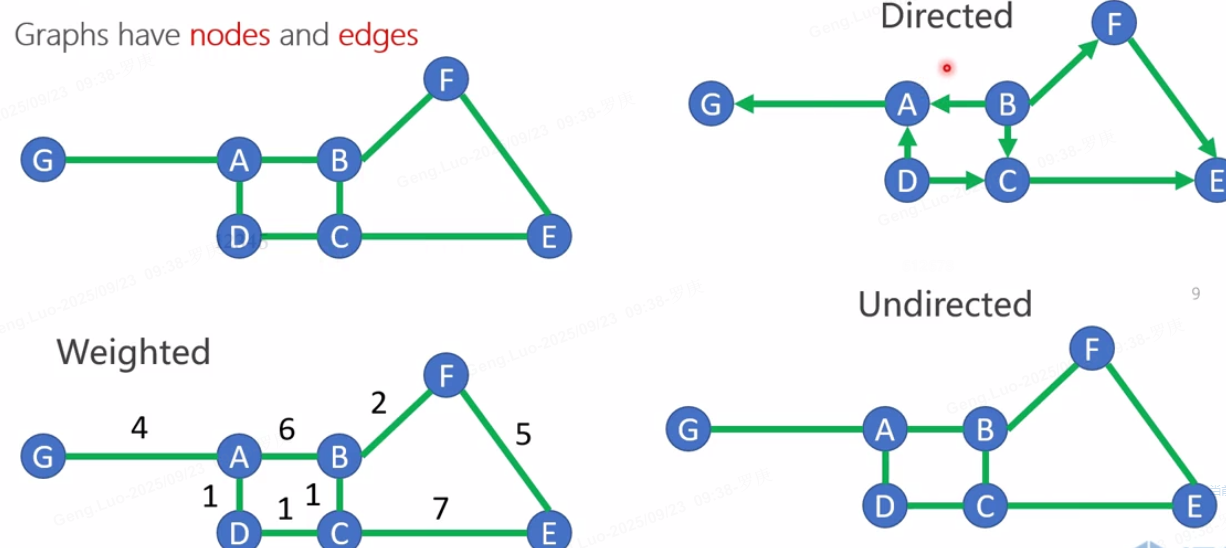
拓扑地图:用图结构表示关键节点(G=(V,E)G=(V,E)G=(V,E))
-
语义地图:融合交通规则(Slane,SsignS_{lane}, S_{sign}Slane,Ssign)
-
-
路径搜索算法
算法类型 特点 适用场景 BFS&DFS 盲目暴力搜索 比较简单的环境 A* 启发式搜索 (f=g+hf=g+hf=g+h) 静态环境全局规划 RRT* 概率完备 (Pconnect>0.95P_{connect}>0.95Pconnect>0.95) 高维复杂空间 Dijkstra 无启发 (gming_{min}gmin) 稠密地图 DWA 动态窗口 ([vmin,vmax][v_{min},v_{max}][vmin,vmax]) 动态环境局部避障
3. 轨迹优化方法
- 样条插值:使用三次样条曲线保证C2C^2C2连续性
- 最优控制:求解Hamilton-Jacobi-Bellman方程:
minu∫t0tfL(x,u,t)dt \min_{u} \int_{t_0}^{t_f} L(x,u,t) dt umin∫t0tfL(x,u,t)dt - 凸优化:将非凸约束转化为凸问题求解
三、核心理论模型
-
车辆运动学模型
- 行车模型:
{x˙=vcos(θ+β)y˙=vsin(θ+β)θ˙=vcosβLtanδ \begin{cases} \dot{x} = v \cos(\theta + \beta) \\ \dot{y} = v \sin(\theta + \beta) \\ \dot{\theta} = \frac{v \cos \beta}{L} \tan \delta \end{cases} ⎩⎨⎧x˙=vcos(θ+β)y˙=vsin(θ+β)θ˙=Lvcosβtanδ
其中β=tan−1(lrtanδL)\beta = \tan^{-1}(\frac{l_r \tan \delta}{L})β=tan−1(Llrtanδ),LLL为轴距。
- 行车模型:
-
障碍物规避理论
- 速度障碍法:计算相对速度锥:
VO={v∣λ(pveh+tv,pobs)≤Rsafe} VO = \{ v | \lambda(p_{veh} + t v, p_{obs}) \leq R_{safe} \} VO={v∣λ(pveh+tv,pobs)≤Rsafe} - 人工势场法:构建势场函数:
Utotal=Uatt+Urep=12kattdgoal2+krepdobs2 U_{total} = U_{att} + U_{rep} = \frac{1}{2} k_{att} d_{goal}^2 + \frac{k_{rep}}{d_{obs}^2} Utotal=Uatt+Urep=21kattdgoal2+dobs2krep
- 速度障碍法:计算相对速度锥:
-
不确定性处理
- 概率路线图(PRM):考虑传感器噪声σsens\sigma_{sens}σsens
- 部分可观测马尔可夫决策过程(POMDP):
π∗=argmaxπE[∑t=0Tγtrt] \pi^* = \arg\max_{\pi} E \left[ \sum_{t=0}^{T} \gamma^t r_t \right] π∗=argπmaxE[t=0∑Tγtrt]
四、典型实现流程
def path_planning(env, vehicle):# 环境感知层grid_map = build_occupancy_grid(env.lidar_data) # 全局路径生成global_path = A_star_search( start=vehicle.position, goal=env.destination,heuristic=euclidean_distance,cost_map=grid_map)# 局部轨迹优化optimized_traj = optimize_with_sqp(init_path=global_path,constraints=[vehicle.dynamics_constraints,env.traffic_rules,obstacle_avoidance(env.moving_objects)])return optimized_traj
五、前沿研究方向
- 多智能体协同:纳什均衡求解 (maxuiJi(ui,u−i)\max_{u_i} J_i(u_i, u_{-i})maxuiJi(ui,u−i))
- 强化学习应用:Q-learning策略 (Q(s,a)←Q+α[r+γmaxa′Q(s′,a′)−Q]Q(s,a) \leftarrow Q + \alpha [r + \gamma \max_{a'}Q(s',a') - Q]Q(s,a)←Q+α[r+γmaxa′Q(s′,a′)−Q])
- V2X增强规划:融合车联网信息 (τcomm<100ms\tau_{comm} < 100msτcomm<100ms)
- 伦理决策框架:构建道德代价函数 (Cethical=f(dped,vrel)C_{ethical} = f(d_{ped}, v_{rel})Cethical=f(dped,vrel))
路径规划系统需满足实时性要求(Δt<100ms\Delta t < 100msΔt<100ms),同时处理10^6量级的状态空间。当前主流方案采用分层架构:全局规划层(1−5Hz1-5Hz1−5Hz)指导局部规划层(10−20Hz10-20Hz10−20Hz),结合控制层(50−100Hz50-100Hz50−100Hz)实现轨迹跟踪。