Diffusion 模型解读
0. 前言
以前总用GAN,但是现在最新的都是Diffusion model,GAN只关注骗过判别器,模型在学习中可能会走捷径,无法控制,训练起来非常难。
DALL·E 2 就是用扩散模型做的。
扩散模型的鼎鼎大名相比所有人都听过,我是在VLA中接触到了这个东西,但是这个东西21年就非常火热了,直到今天还有很多人在研究,现在来详细看一看。
diffusion对动作生成友好,但是对指令的跟随不是很好–来自自变量
本文参考自:【【大白话01】一文理清 Diffusion Model 扩散模型 | 原理图解+公式推导】 https://www.bilibili.com/video/BV1xih7ecEMb/?share_source=copy_web&vd_source=b803c42182cb2250e40705156605fca1
1. 什么是 Diffusion Model
Denoising Diffusion Probabilistic Models
首先是前向扩散过程,一张原始图片经过T次加噪,得到一张杂乱无章的噪声图,原始论文加了2000次

是否有一种反向过程,能够把噪声图逐步去噪还原回图像。

什么是加噪?每次加一个01分布的高斯噪声

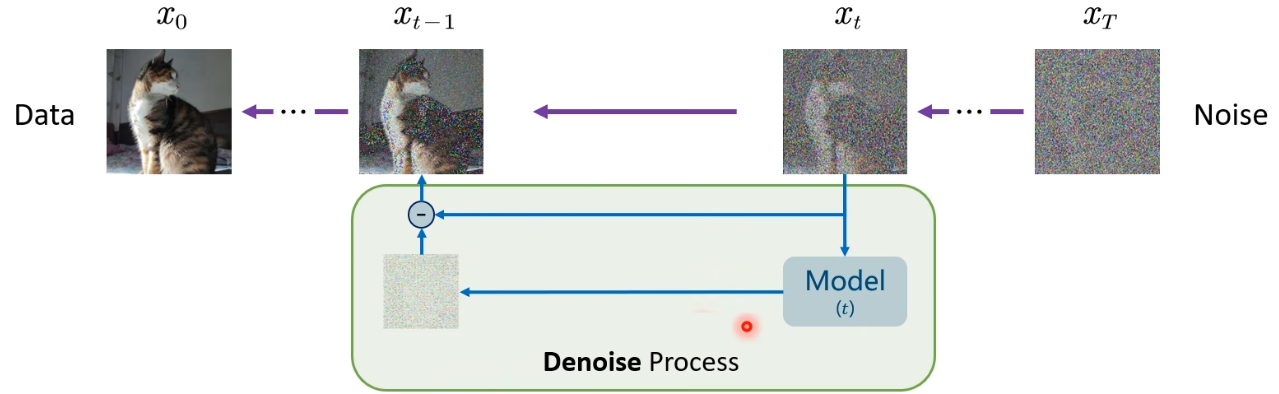
对于反向过程其实就是训练出一个神经网络,它可以预测出噪声,然后xtx_txt时间步的信息减去模型预测出的噪声,就得到xt−1x_{t-1}xt−1时间步的图片,这就是去噪的一个过程。
1.1 前向扩散过程
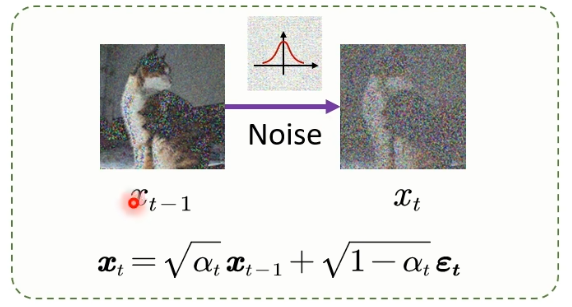
在前向扩散过程的两个时间步之间加噪时,不是直接 前一步的+高斯分布=新一步的 。
而是有两个系数,通过线性组合来实现递增加噪的过程:
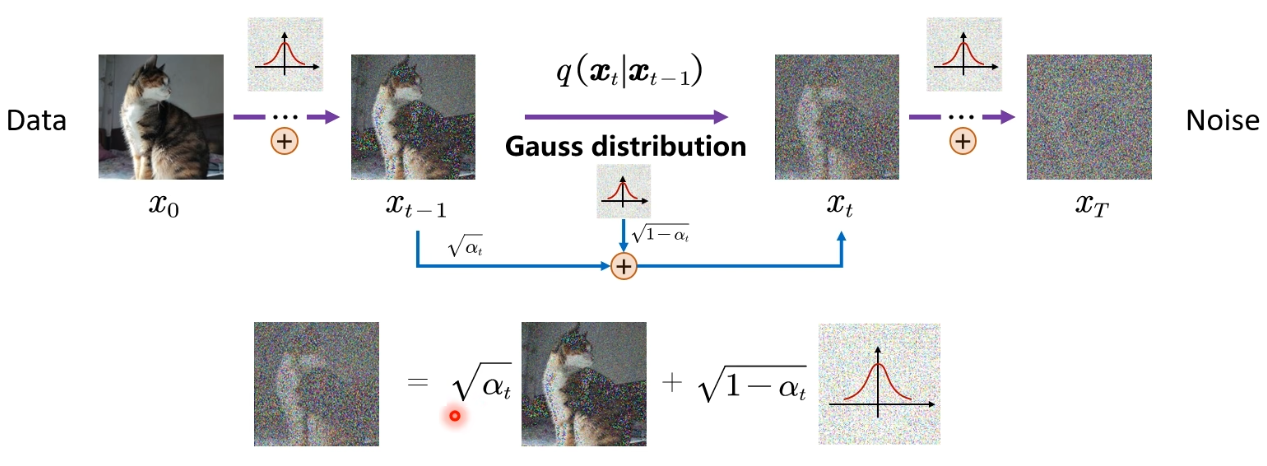
新生成的xtx_txt的图是满足高斯分布的,经过数学推导可以知道: 是01正态分布,
是01正态分布, 就是标准差,前面的
就是标准差,前面的 就是均值。
就是均值。
写成数学表达式的样子就是:
我们再用概率分布去组织一下xt−1x_{t-1}xt−1到xtx_txt的过程,就得到了:

那么我们再把xtx_txt的图片作为signal信号,高斯分布作为noise噪声,这就可以反映出信噪比。
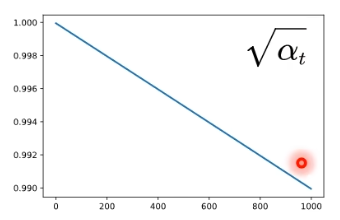
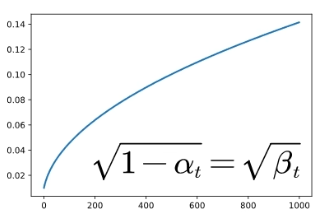
随着时间步的增加,均值越来越小,说明原始信号的幅度按比例缩放,相当于信息占比越来越少;标准差表示噪声强度,αtα_tαt越来越小,1-αtα_tαt就越来越大,随着时间步增加,加的噪声越来越多,数据越模糊。
因为刚开始一个原图的话,稍微加点噪声,变化就挺多了,后面噪声多了之后,得越加越多,不然体现不出变化。
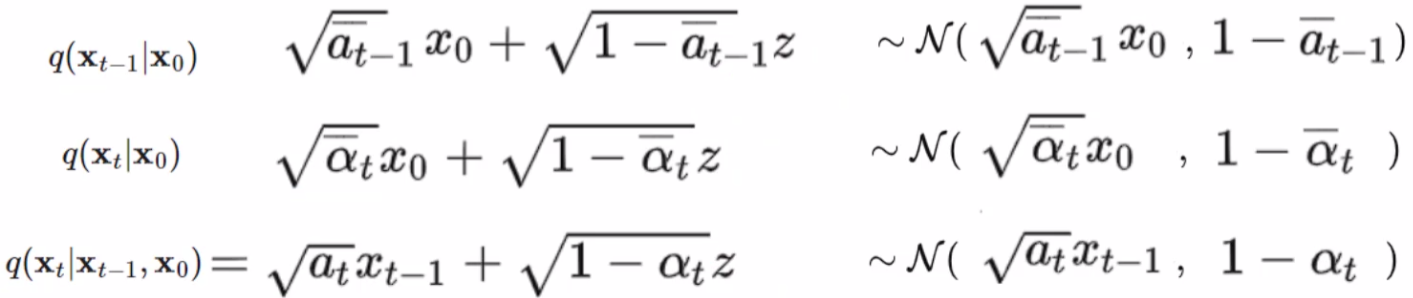
上面是相邻两步的一个加噪过程,我们来看一下怎么 扩展到x0x_0x0到xtx_txt
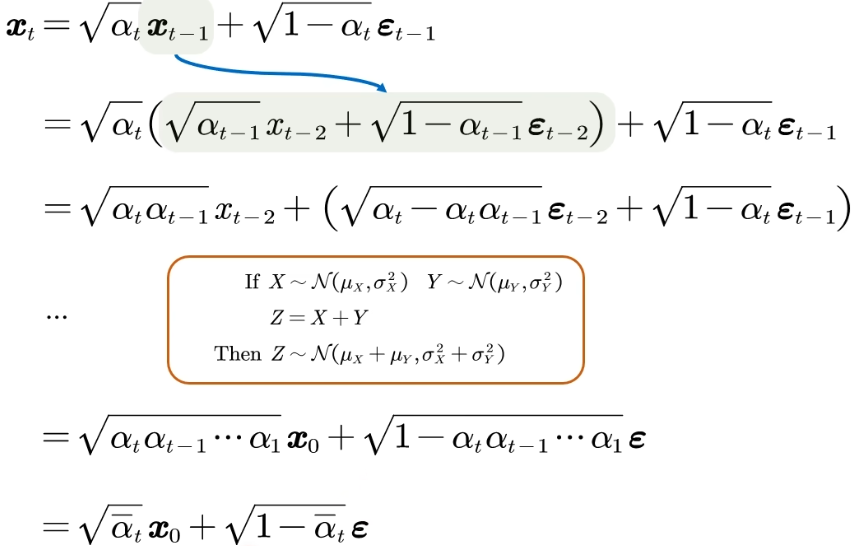
根据第一个式子可以看出:xtx_txt只与xt−1x_{t-1}xt−1相关,展开之后就得到第二个式子,根据定理得知后面那个式子的两个高斯分布可以合并(各自平方后就满足定理,再相加后整体开根号),合并之后还是高斯分布,那么层层递归就可以得到最后的式子。
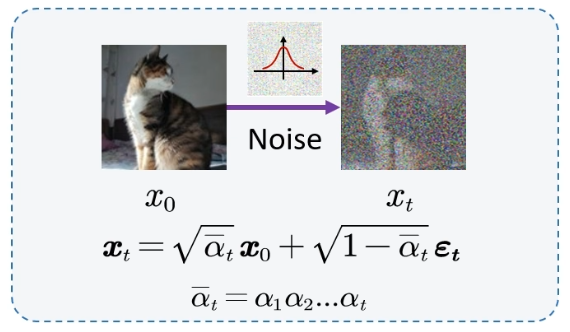
这样我们就得到了整个前向过程加噪的加噪过程,我们可以一步跳跃式的加噪到任意t时间步。
为什么要这样呢?因为我们的反向过程只需要最后的加好的噪声图,不关注前面的每一个时间步做的事情,所以从 x0x_0x0 直接推导到 xtx_txt 就特别方便了。
这个就是diffusion中的第一个最核心的公式,代码中是一定会用到的。
1.2 反向扩散过程
现在能加噪了,但是我们的目的是去噪。
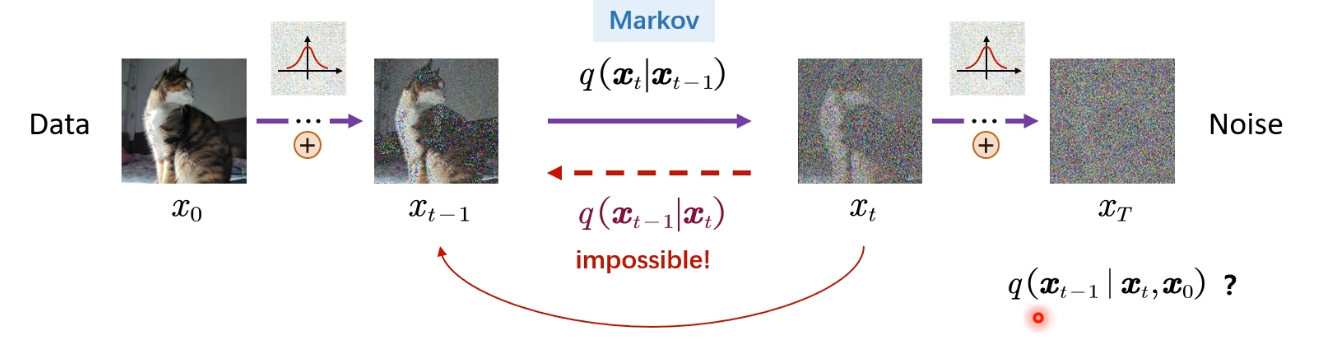
当我们有一堆随机噪点,需要逐步还原成不带噪音。上一步加噪我们可以从头一步加到尾,去噪确实做不到这个过程,只能一步步去噪。但是其实这个一步步去噪是很难做的,为什么呢?
因为反向过程时,我们只知道一个纯噪声,让它变换回原本的图像是非常难的,常规方法做不到,所以需要用神经网络了。
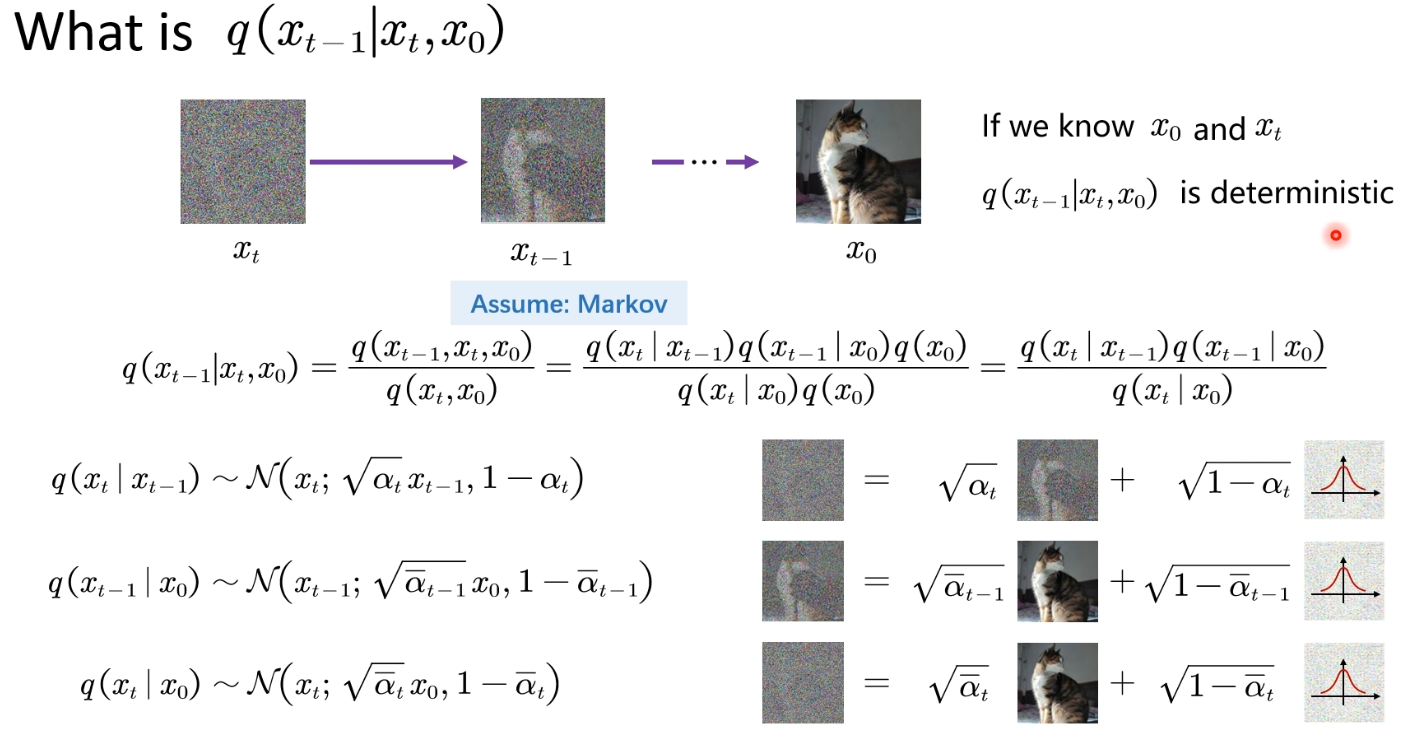
我们可以定义一个模型,让它去符合高斯分布。我们已知 xTx_TxT 的分布,要求 xT−1x_T-1xT−1 的分布,已知后一时刻,求前一时刻,通过贝叶斯公式:
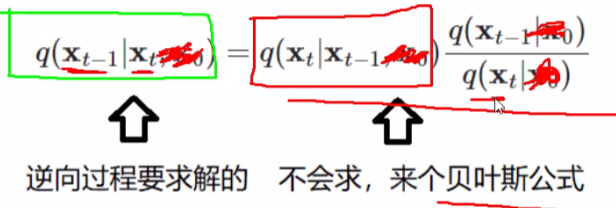
其中,这个是我们之前求出来的公式: ,那么q(xt−1)q(x_{t-1})q(xt−1) 和 q(xt)q(x_{t})q(xt) 怎么求呢?别忘了,我们在前向加噪时,是可以通过求任意时刻的 xtx_txt 的,所以有x0x_0x0就行,于是这个公式会在后面加上x0x_0x0 :
,那么q(xt−1)q(x_{t-1})q(xt−1) 和 q(xt)q(x_{t})q(xt) 怎么求呢?别忘了,我们在前向加噪时,是可以通过求任意时刻的 xtx_txt 的,所以有x0x_0x0就行,于是这个公式会在后面加上x0x_0x0 :

本质就是通过贝叶斯公式进行一个转换,往前推一步。把上面公式的每一子式都展开:
可以概括为以下内容:
正比关系:f(x;μ,σ2)∝exp(−1/2∗(x−μ)2/σ2)f(x;μ,σ^2)∝exp(−1/2*(x−μ)^2/σ^2)f(x;μ,σ2)∝exp(−1/2∗(x−μ)2/σ2)
z 是一个正态分布,乘上一个数,加上一个数,其实还是符合正态分布的,只是改变了均值和标准差,每个子式都是如此。N()N()N()括号里的第一项是均值,第二项是标准差,每一个子式按照标准正态分布展开:

我们可以仔细观察一下,以e为底的指数函数乘法相当于加,除法相当于减。第一项对应q(xt∣xt−1,x0)q(x_t|x_{t-1}, x_0)q(xt∣xt−1,x0),第二项q(xt−1∣x0)q(x_{t-1}|x_0)q(xt−1∣x0),第三项q(xt∣x0)q(x_t|x_0)q(xt∣x0)。我们要求的东西就符合这样一个分布。
接下来就是化简,把平方展开,合并同类项:

我们要求的是 xtx_txt 和 xt−1x_{t-1}xt−1 的关系,我们只关心 xt−1x_{t-1}xt−1 和谁有关系,所以上面合并同类项时就把xt−1x_t-1xt−1提取出来了。前一时刻也符合这种分布,所以可以一一对应:

这样和正态分布正比关系一对应,就得到 xt−1x_{t-1}xt−1 分布的均值和方差了,xt−1x_{t-1}xt−1 对应 xxx:
 ,这个就是求出来的均值结果。
,这个就是求出来的均值结果。
我们这个公式中还有 x0x_0x0,但是这个东西是我们最后要求的东西,这个东西是未知的,注意,我们在加噪时的公式是已知x0x_0x0,求xtx_txt,那我们反过来就可以用xtx_txt替换一下这个x0x_0x0,
替换完成后的最终结果就变成了:
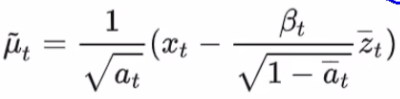
现在我们的均值只与xtx_txt有关,也就是说我们已知xtx_txt,就可以求出前一时刻 xt−1x_{t-1}xt−1 分布的均值和方差,也就知道了它的分布,这个原始版本中方差是固定值,现在我们也把均值求出来了。这个ztz_tzt是个啥?这个是加噪时的噪音。
我们现在只知道xtx_txt,这个时候的噪音又不知道,怎么办呢?训练一个模型,预测这个噪音是多少,但是损失需要的这个真实值怎么得到呢?这个标注怎么做呢?我们在前向加噪时就需要保存这些加噪的噪声,前向的过程其实就是提供这个标签的一个过程,反向去噪时就用这个标签拟合去噪。
这些相关论文里都是用Unet这种结构去做的,可能是编码和解码看的比较舒服,可能预测这个噪声不需要很复杂的网络结构。当然,训练阶段需要前向提供数据,训练好之后使用就可以了,每一步去噪时,输入是一直变的,所以都需要这个unet做一个去噪噪声的预测,当然unet的参数是不变的。
1.3 总结
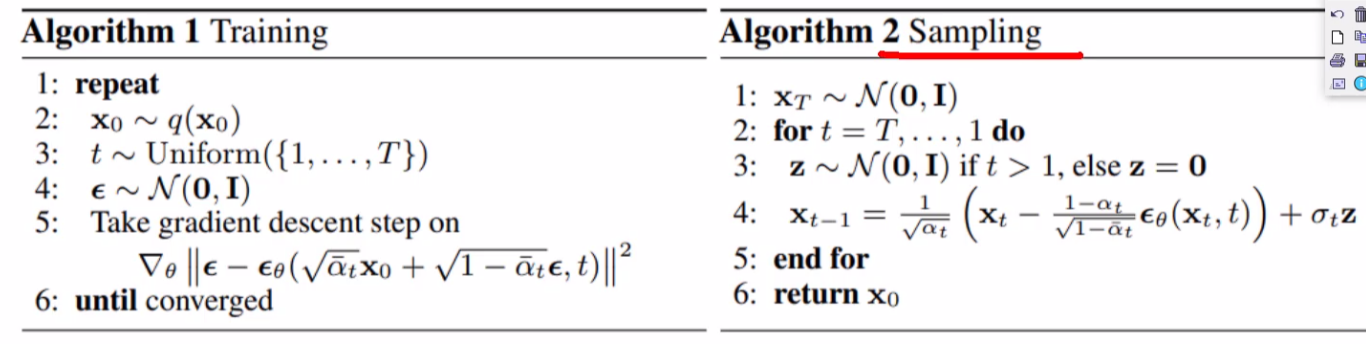
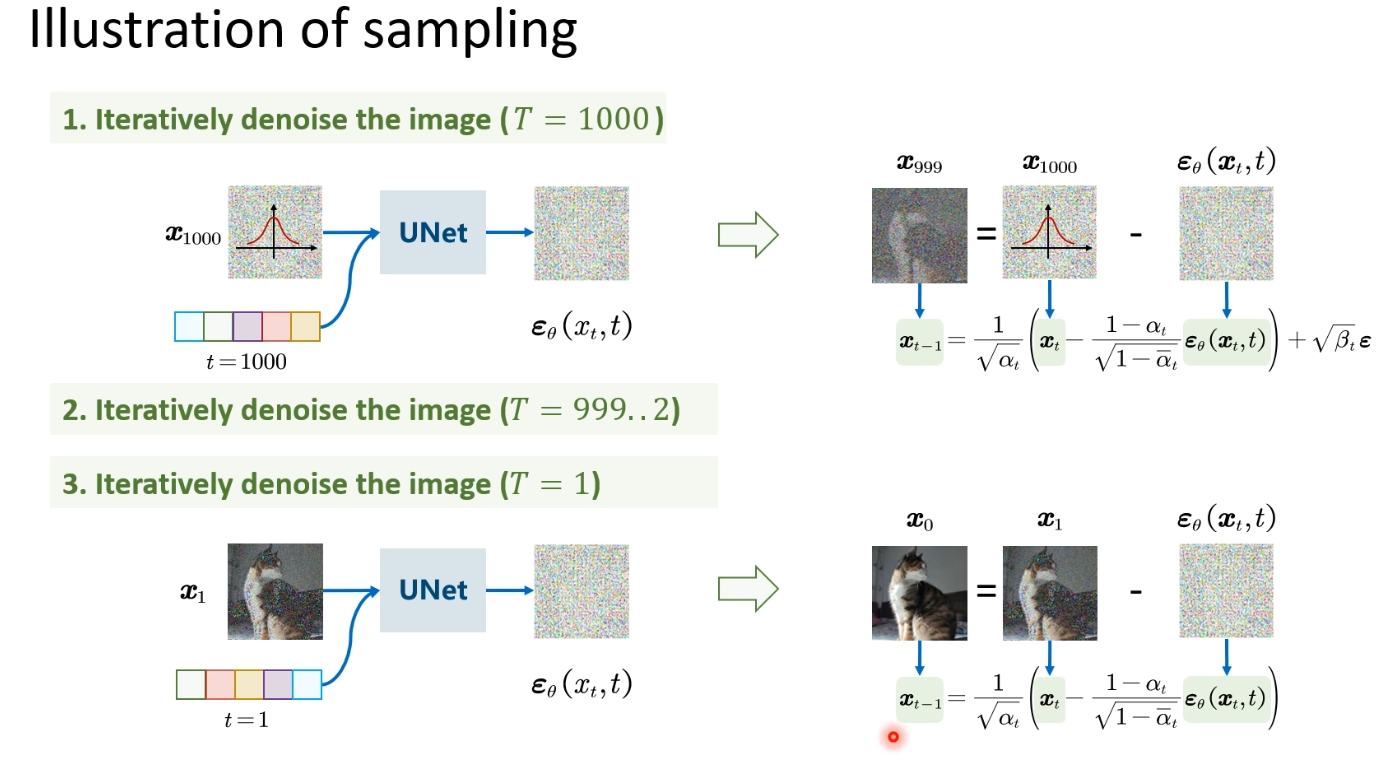
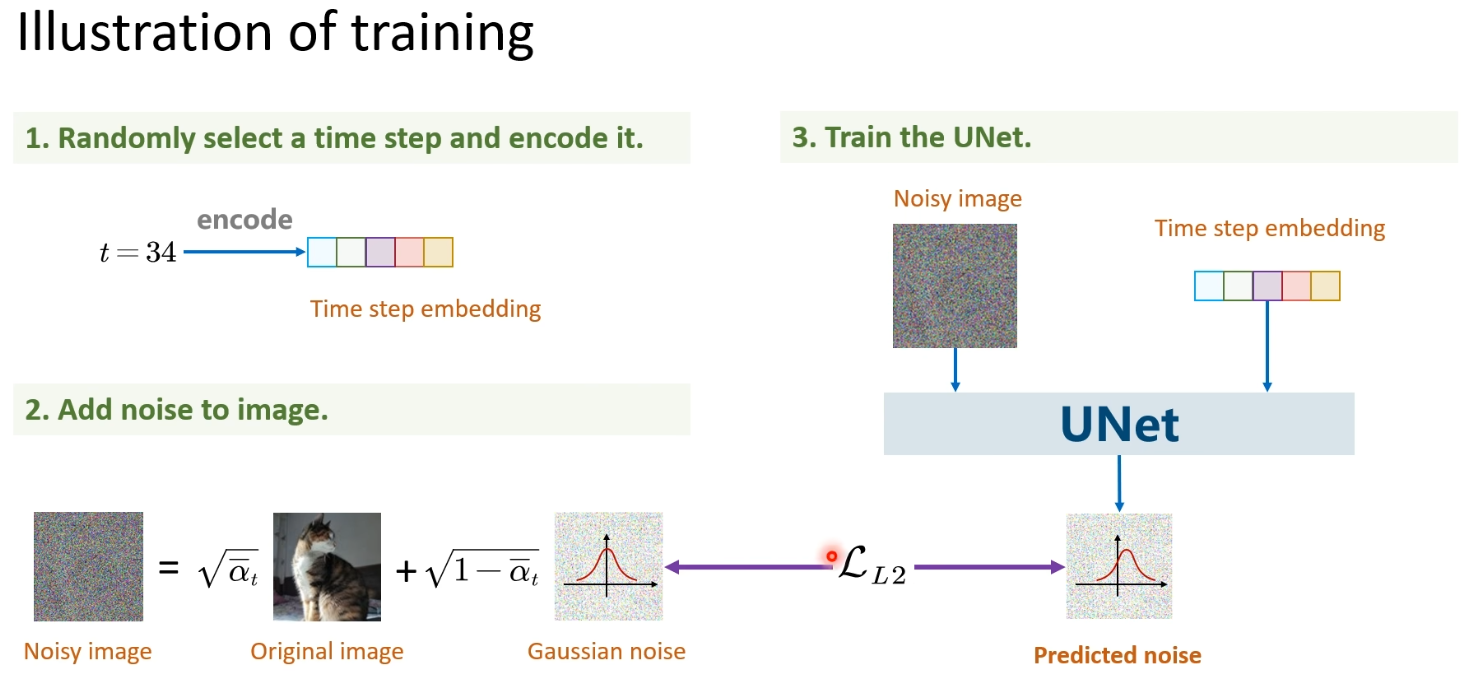
训练阶段就是训练一个预测噪声的模型,用模型预测出的噪声去拟合真实的噪声,算个损失,梯度下降更新参数,至于为什么要传t,是因为我们在加噪的时候,噪声是越加越大的,模型需要知道这个时间的影响。如下图:
sampling 就是for循环一步一步去噪, xt−1x_{t-1}xt−1 只与 xtx_txt有关,用训练阶段训练出的模型,通过输入xtx_txt的图像,t,预测出噪声,然后乘上系数,实现去噪。如下图: