C2000基础-TIM介绍及使用
第五章 TIM介绍及基础使用
1. F28P550的CPU定时器
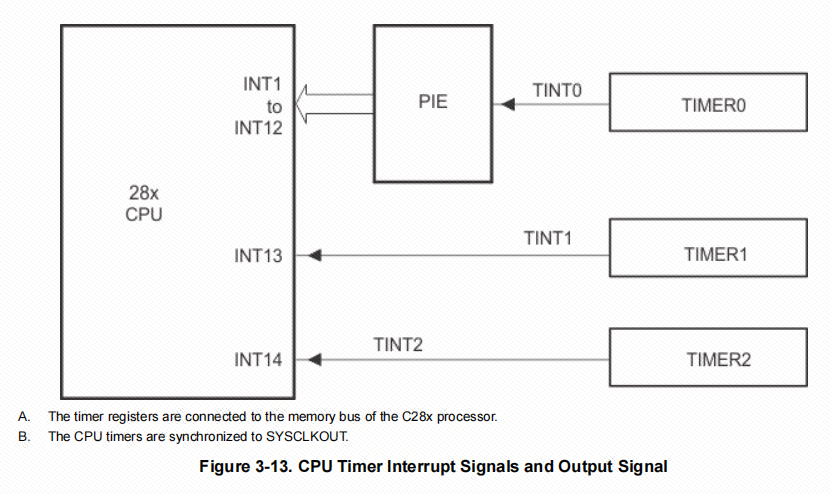
F28P550的CPU定时器有3个,Timer0、Timer1和Timer2。 它们是完全一样的 32 位计时器,具有可预设定周期 和 16 位时钟预分频。此计时器具有 32 位递减计数寄存器,该寄存器在计数器达到 0 时生成一中断。
计数器以 CPU 时钟速度 除以 预分频值设置 形式递减。当计数器达到 0 时,则自动重新加载 32 位周期值。
CPU 计时器 0 用于普通用途并连接至 PIE 块。
CPU 计时器 1 也用于普通用途,并连接至 CPU 的 INT13。
CPU 计时器 2 为 TI-RTOS 保留。该计时器连接至 CPU 的 INT14。如果未使用 TI-RTOS ,CPU 计时器 2 也可用于普通用途。
CPU 计时器 0 和 CPU 计时器 1 使用的是 SYSCLK 时钟,默认为150MHz。
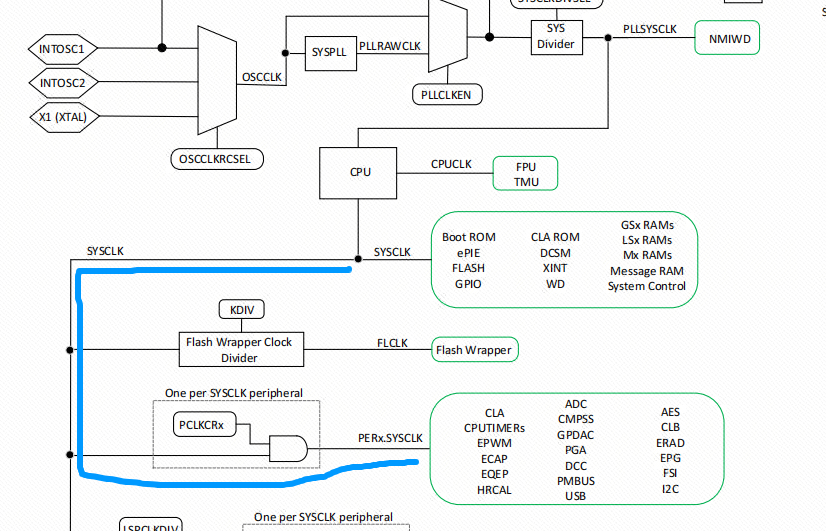
CPU 计时器 2 的时钟可由下列任一时钟来源:
- SYSCLK(默认)
- 内部振荡器 1(INTOSC1)
- 内部振荡器 2(INTOSC2)
- X1 (XTAL)
定时器时间换算
假设使用CPU 计时器 0,其使用的时钟源是 SYSCLK,它默认的频率 = 150MHz
period 为设置的定时器周期
Prescaler 为时钟预分频
则定时时间为:
定时时间 = (Period + 1) * (Prescaler + 1) / 定时器频率
2. TIM使用示例
2.1 CCS&syscfg配置
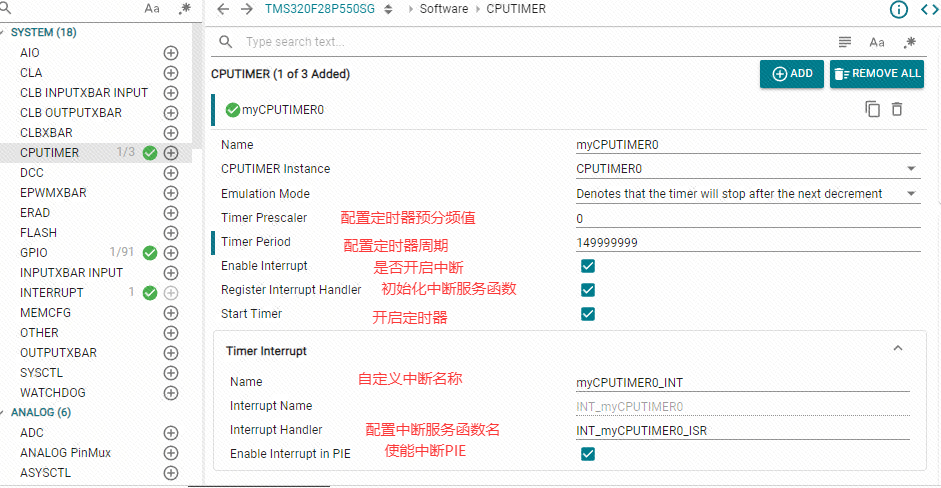
图中,我们配置了 预分频值Prescaler = 0,周期Period = 149,999,999,则定时时间为:
定时时间 = (Period + 1) * (Prescaler + 1) / 定时器频率 = (149,999,999 + 1) * 1 / 150,000,000 = 1 秒
因为计数器是一个向下计数的模式,则计数器从 149,999,999 减到 0 时,一共会花费 1 秒的时间。
每记一个数所花费的时间 = 1 / 预分频后的定时器频率 = 1 / 150,000,000 = 6.6667 纳秒。
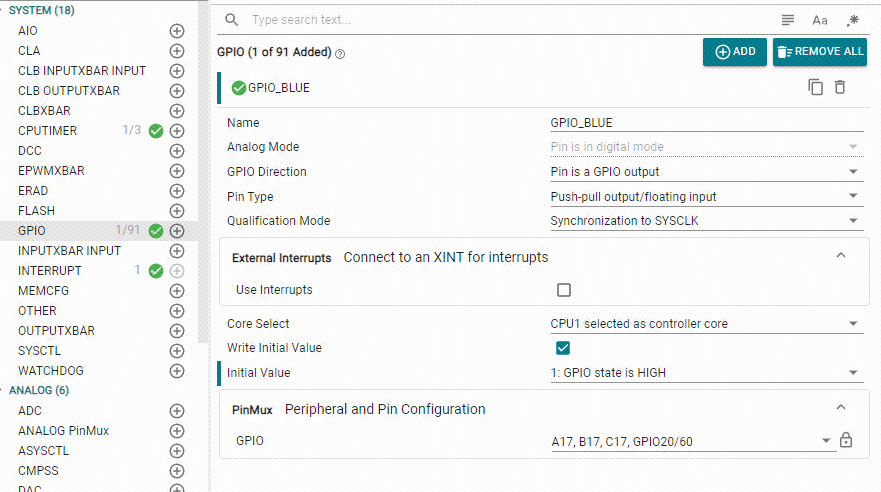
因为案例中用到了蓝色LED灯用来展示状态,所以还需要配置LED灯的引脚为输出模式。
2.2 用户代码
//#############################################################################
//
// FILE: empty_driverlib_main.c
//
//! \addtogroup driver_example_list
//! <h1>Empty Project Example</h1>
//!
//! This example is an empty project setup for Driverlib development.
//!
//
//#############################################################################
//
//
//
// C2000Ware v5.05.00.00
//
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"//
// Main
//
void main(void)
{//// Initialize device clock and peripherals//Device_init();//// Disable pin locks and enable internal pull-ups.//Device_initGPIO();//// Initialize PIE and clear PIE registers. Disables CPU interrupts.//Interrupt_initModule();//// Initialize the PIE vector table with pointers to the shell Interrupt// Service Routines (ISR).//Interrupt_initVectorTable();//// PinMux and Peripheral Initialization//Board_init();//// C2000Ware Library initialization//C2000Ware_libraries_init();//// Enable Global Interrupt (INTM) and real time interrupt (DBGM)//EINT;ERTM;while(1){}
}__interrupt void INT_User_TIM0_ISR(void)
{GPIO_togglePin(User_LED);Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
}//
// End of File
//
3. C2000 定时器 (TIMER) 相关函数总结 (基于DriverLib)
注:C2000的定时器系统非常丰富且强大,远超基本的通用定时器概念。它主要包括:
CPU定时器 (CPU Timers):与C28x内核紧密关联,常用于操作系统节拍或高优先级任务调度。
ePWM模块中的定时器:这是C2000的精髓,每个ePWM模块都包含一个专用的时基模块(TB),用于产生PWM波形的核心时序。(我们将专注于此)
eCAP模块:可配置为捕获模式(测量频率/占空比)或APWM模式(作为一路PWM输出)。
本总结将重点介绍ePWM的时基模块(TB),因为它是最常用、最强大的定时器应用形式。
3.1 ePWM时基模块(TB)概述与核心概念
ePWM的时基模块并非一个独立的定时器,而是一个专门为生成同步PWM波形而优化的定时器系统。它可以独立运行,也可以与其他ePWM模块同步,形成复杂的多通道、高精度控制系统。
-
核心时钟路径:
HSPCLK -> TBCLK (时基时钟) -> TBCTR (时基计数器) -> 比较匹配 -> 生成事件 -
主要组件说明:
组件 功能 C2000特点 时基计数器 (TBCTR) 核心计数器,在特定模式下循环计数。 可配置为递增、递减、先增后减模式。决定了PWM的周期。 周期寄存器 (TBPRD) 设置TBCTR的计数周期值。 有影子寄存器,可实现无毛刺的周期更新。 时基时钟预分频器 对HSPCLK进行分频,产生时基时钟TBCLK。 可大幅降低计数频率,适应低速控制需求。 同步输入/输出 (SYNCI/SYNCO) 实现多个ePWM模块之间的精确同步。 可构建主从模式,确保所有PWM通道的起始点对齐。 比较寄存器 (CMPA/CMPB) 与TBCTR的值进行比较,用于控制PWM占空比。 属于动作限定模块(AQ),但与时基紧密相关。
3.2 ePWM时基模块初始化与配置
-
核心配置流程(五步关键操作):
-
使能ePWM外设时钟(配置HSPCLK,通常已在时钟初始化中完成)
-
配置GPIO复用为ePWM功能(将特定引脚设置为EPWMxA/EPWMxB)
-
初始化时基模块参数(时钟分频、计数模式、周期值)
-
配置比较模块和动作限定器(设置占空比和输出动作)
-
(可选)配置同步和中断
-
-
基础配置示例(配置ePWM1,产生一个100kHz,50%占空比的PWM):
#include "driverlib.h"// 假设HSPCLK = 100MHz (SYSCLK=200MHz / HSPCLKDIV=2) #define HSPCLK_FREQ_HZ 100000000 #define PWM_FREQ_HZ 100000 // 100 kHz #define PWM_DUTY_CYCLE 0.5 // 50%void main(void) {uint16_t periodValue, compareValue;// 1. 初始化器件、GPIODevice_init();Device_initGPIO();// ... 确保HSPCLK已正确分频 ...// 2. 配置GPIO引脚为ePWM功能 (以ePWM1A为例, GPIO0)GPIO_setPinConfig(GPIO_0_EPWM1A);// 3. 计算周期值和比较值periodValue = (HSPCLK_FREQ_HZ / PWM_FREQ_HZ) - 1; // TBCLK = HSPCLKcompareValue = (uint16_t)((float)periodValue * PWM_DUTY_CYCLE);// 4. 配置ePWM1的时基模块EPWM_setTimeBasePeriod(EPWM1_BASE, periodValue); // 设置周期值EPWM_setPhaseShift(EPWM1_BASE, 0); // 相位偏移为0EPWM_setTimeBaseCounter(EPWM1_BASE, 0); // 计数器从0开始EPWM_setTimeBaseCounterMode(EPWM1_BASE, EPWM_COUNTER_MODE_UP); // 递增计数模式EPWM_disablePhaseShiftLoad(EPWM1_BASE); // 禁用相位重载EPWM_setClockPrescaler(EPWM1_BASE, EPWM_CLOCK_DIVIDER_1, // TBCLK = HSPCLK / 1EPWM_HSCLOCK_DIVIDER_1); //// 5. 配置比较模块和动作限定器 (AQ)EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, // 使用CMPAcompareValue);// 设置动作:计数器等于CMPA时,EPWM1A输出拉高;计数器等于周期值时,拉低EPWM_setActionQualifierAction(EPWM1_BASE,EPWM_AQ_OUTPUT_A,EPWM_AQ_OUTPUT_HIGH, // 动作:置高EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPA); // 条件:递增且等于CMPAEPWM_setActionQualifierAction(EPWM1_BASE,EPWM_AQ_OUTPUT_A,EPWM_AQ_OUTPUT_LOW, // 动作:置低EPWM_AQ_OUTPUT_ON_TIMER_UP_PERIOD); // 条件:递增且等于PRD// 6. 使能ePWM模块输出EPWM_enableOutput(EPWM1_BASE);while(1) {// 主循环中可以动态修改CMPA来改变占空比// EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, newCompareValue);// 注意:直接写入CMPA可能有毛刺,高级应用应使用影子寄存器} } -
关键时基配置函数详解:
函数 (DriverLib) 说明 参数示例与解释 EPWM_setTimeBasePeriod(uint32_t base, uint16_t period)设置时基周期值 (TBPRD)。 base:EPWM1_BASE,EPWM2_BASE等period: 周期计数值,决定PWM频率。EPWM_setTimeBaseCounterMode(uint32_t base, EPWM_CounterMode mode)设置计数模式。 mode:EPWM_COUNTER_MODE_UP(递增)EPWM_COUNTER_MODE_DOWN(递减)EPWM_COUNTER_MODE_UP_DOWN(先增后减,中心对称PWM)EPWM_setClockPrescaler(uint32_t base, EPWM_ClockDivider clkDiv, EPWM_HSCLOCKDivider hsClkDiv)设置时基时钟预分频。 clkDiv: TBCLK分频 (EPWM_CLOCK_DIVIDER_1~32)hsClkDiv: High-speed pre-divider (EPWM_HSCLOCK_DIVIDER_1~16)
TBCLK = HSPCLK / (hsClkDiv * clkDiv)EPWM_setTimeBaseCounter(uint32_t base, uint16_t count)设置时基计数器的初始值。 count: 初始计数值,通常设为0。EPWM_setPhaseShift(uint32_t base, uint16_t phase)设置相位偏移值。用于模块间同步。 phase: 相位偏移计数值。
3.3 计数模式与PWM生成
ePWM的时基计数器模式直接决定了PWM的类型。
-
递增计数模式 (Up-Count):
-
波形:不对称PWM。
-
特点:计数器从0到TBPRD。常用于电源控制(如Buck、Boost转换器),因为开关事件可以集中在周期的一端。
-
占空比计算:
占空比 = CMPA / TBPRD
-
-
递减计数模式 (Down-Count):
-
波形:不对称PWM。
-
特点:计数器从TBPRD到0。不常用,但有时用于特定拓扑。
-
占空比计算:
占空比 = 1 - (CMPA / TBPRD)
-
-
先增后减计数模式 (Up-Down-Count):
-
波形:对称(中心对齐)PWM。
-
特点:计数器从0到TBPRD再回到0。常用于电机驱动和逆变器,因为谐波特性更好。每个周期有两次比较匹配。
-
占空比计算:
占空比 = (2 * CMPA) / (2 * TBPRD) = CMPA / TBPRD(但有效频率为Fpwm = TBCLK / (2 * TBPRD))
-
3.4 高级功能与特性
-
影子寄存器与无毛刺更新:
为了在PWM运行时安全地更新周期或比较值,避免产生毛刺脉冲,必须使用影子寄存器。// 配置CMPA使用影子寄存器,在CTR=0(周期点)时自动加载 EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE,EPWM_COUNTER_COMPARE_A,EPWM_COMP_LOAD_ON_CNTR_ZERO); // 在计数器为0时加载// 安全地更新占空比(新值会先写入影子寄存器,在下一个周期生效) EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, newCompareValue); -
同步 (Synchronization):
多个ePWM模块可以同步,确保所有PWM波形具有一致的起始点。// 配置ePWM1为主模块,输出同步脉冲 EPWM_setSyncOutPulseMode(EPWM1_BASE, EPWM_SYNC_OUT_PULSE_ON_CNTR_ZERO);// 配置ePWM2为从模块,使用ePWM1的同步脉冲作为其同步输入 EPWM_setSyncInputPulseSource(EPWM2_BASE, EPWM_SYNC_IN_PULSE_SRC_EPWM1SYNCOUT); EPWM_allowSyncOutPulse(EPWM2_BASE); // 允许同步事件复位它的计数器 -
时基中断:
时基模块可以在特定时间点产生中断,例如在周期开始或结束时。// 使能时基周期中断(在每个PWM周期开始时产生中断) EPWM_enableInterrupt(EPWM1_BASE); EPWM_setInterruptSource(EPWM1_BASE, EPWM_INT_TBCTR_ZERO); // 中断源:计数器等于0 EPWM_setInterruptEventCount(EPWM1_BASE, 1); // 每1个事件产生一次中断// 注册PIE中断服务函数 (ePWM1中断属于INT3.1) Interrupt_register(INT_EPWM1, &epwm1ISR); Interrupt_enable(INT_EPWM1);
3.5 使用示例(电机驱动三相PWM)
示例:配置ePWM1/2/3,产生三相对称PWM,相位互差120度
#include "driverlib.h"#define PWM_FREQ_HZ 20000 // 20kHz开关频率
#define HSPCLK_FREQ_HZ 100000000 // 100MHz
#define TBPRD_VALUE (HSPCLK_FREQ_HZ / (2 * PWM_FREQ_HZ) - 1) // 用于Up-Down模式
#define PHASE_SHIFT_120 ( (2 * TBPRD_VALUE + 1) / 3 ) // 计算120度相位差对应的计数值void main(void) {Device_init();Device_initGPIO();Device_initPWM();// 配置GPIO为ePWM功能 (GPIO0/1->ePWM1A/B, GPIO2/3->ePWM2A/B, GPIO4/5->ePWM3A/B)GPIO_setPinConfig(GPIO_0_EPWM1A);GPIO_setPinConfig(GPIO_2_EPWM2A);GPIO_setPinConfig(GPIO_4_EPWM3A);// 配置ePWM1为主模块_initEPWMModule_(EPWM1_BASE, 0, TBPRD_VALUE); // 相位偏移为0EPWM_setSyncOutPulseMode(EPWM1_BASE, EPWM_SYNC_OUT_PULSE_ON_CNTR_ZERO);// 配置ePWM2为从模块,相位偏移120度_initEPWMModule_(EPWM2_BASE, PHASE_SHIFT_120, TBPRD_VALUE);EPWM_setSyncInputPulseSource(EPWM2_BASE, EPWM_SYNC_IN_PULSE_SRC_EPWM1SYNCOUT);EPWM_allowSyncOutPulse(EPWM2_BASE);// 配置ePWM3为从模块,相位偏移240度_initEPWMModule_(EPWM3_BASE, (2 * PHASE_SHIFT_120), TBPRD_VALUE);EPWM_setSyncInputPulseSource(EPWM3_BASE, EPWM_SYNC_IN_PULSE_SRC_EPWM1SYNCOUT);EPWM_allowSyncOutPulse(EPWM3_BASE);while(1) {// 主循环中可以通过CLB、SPI或软件更新CMPA/CMPB值,实现SVPWM或正弦PWM调制}
}// ePWM模块初始化函数(公用)
void _initEPWMModule_(uint32_t base, uint16_t phase, uint16_t period) {EPWM_setTimeBasePeriod(base, period);EPWM_setPhaseShift(base, phase);EPWM_setTimeBaseCounter(base, 0);EPWM_setTimeBaseCounterMode(base, EPWM_COUNTER_MODE_UP_DOWN); // 中心对称模式EPWM_setClockPrescaler(base, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);// ... 还需要配置动作限定器(AQ)来生成PWM ...
}
4. 关键注意事项
-
时钟源HSPCLK:ePWM的时基时钟TBCLK来源于HSPCLK。确保HSPCLK的频率正确配置和分频是计算PWM频率的基础。
-
影子寄存器:在电机驱动、数字电源等对波形完整性要求极高的应用中,必须使用影子寄存器来更新CMPA、CMPB和TBPRD,以避免灾难性的毛刺。
-
死区时间:上述示例未配置死区时间。在实际的半桥或全桥电路中,必须使用ePWM的死区子模块(DB) 来生成互补带死区的PWM对,防止上下管直通。
-
计数模式选择:
-
UP/DOWN模式:用于电机驱动,谐波更小。
-
UP模式:用于开关电源,控制更简单。
-
精度与频率:PWM频率和占空比的精度由TBCLK的频率和TBPRD的值决定。
TBCLK越高,TBPRD越大,精度越高,但会限制最高PWM频率。需要在分辨率和频率之间权衡。 -
模拟比较器与跳变区域:ePWM可以与C2000内部的模拟比较器联动,实现过流保护等功能的硬件级快速关断(Trip Zone),响应速度远快于软件中断。这是C2000用于实时控制的关键安全特性。
文中完整参考代码:https://github.com/hazy1k/C2000-Quick-Start-Guide-CCS/tree/main/TMS320F28P550/2.code