AutoTrack-IR-DR200仿真导航实验详解:为高校打造的机器人学习实践平台
在机器人技术的学习过程中,机器人实验的 “环境搭建关” 往往最耗时 —— 找源码、装依赖、解编译报错,有时一下午都跑不通第一个程序。普兰机器人为 AutoTrack-IR-DR200平台提供的仿真导航实验环境,为高校学生提供了一个安全、可控且功能完备的学习平台。把 “源码获取、目录解读、编译配置” 全流程标准化,不用搜零散教程,跟着步骤走就能快速开启建图、定位、导航仿真实验。学生可以通过仿真导航实验在不接触实际硬件的情况下,深入理解机器人导航的各个环节,从基础概念到高级算法都能得到充分实践。
仿真导航实验:从工程搭建到环境就绪
仿真导航实验的核心是 “在电脑上模拟机器人导航”—— 就像用游戏模拟器练赛车,不用真机器人也能调试 AutoTrack-IR-DR200 的仿真工程,不用真机器人也能练 “建图、定位、避障、路径规划”,特别适合课程预习、算法调试和低成本实验。下面先从 “获取工程源码” 开始,一步步带你搭建实验环境。
1、 工程环境:把 “机器人导航大脑” 装进你的电脑
要做仿真导航实验,首先得把 AutoTrack-IR-DR200 的 “导航工程” 下载到电脑上 —— 这个工程就像 “机器人的大脑蓝图”,包含了建图、定位、导航所需的所有程序文件。你可以从 GitHub 直接下载,也用压缩包提取,两种方式都很简单,本科生跟着操作就能完成。从AutoTrack-IR-DR200 PlanRobotShenZhen Githubhttps://github.com/PlanRobotShenZhen/AutoTrack-IR-DR200.git 或压缩包提取工程
2、 工程目录结构:像 “整理书包” 一样看懂文件分工
下载完工程后,你会看到一个叫 “catkin_ws” 的文件夹(这是 ROS 系统的标准工作空间,就像你专门装课本的书包)。里面的文件分工明确,就像书包里 “课本放一层、文具放一层、笔记本放一层”,每个文件夹都有固定作用,不用怕找错文件。我们先拆解这个 “书包” 的结构,知道每个文件是干嘛的,后续改参数、调程序才不会乱。
it 或压缩包提取工程
1、 工程目录结构
~/catkin_ws
├── src
│ ├── CMakeLists.txt
│ ├── bot_navigation
│ │ ├── launch
│ │ ├──amcl.launch
│ │ ├──ekf.launch
│ │ ├──gmapping.launch
│ │ ├──localization.launch
│ │ ├──move_base.launch
│ │ ├──navigation.launch
│ │ ├──save_map.launch
│ │ ├── maps
│ │ ├── param
│ │ ├── rviz
│ │ ├── scripts
│ ├── drivers
│ ├── CMakeLists.txt
└── tools
├── README.md
~/catkin_ws (ROS工作空间根目录)
maps/:存放建图生成栅格地图文件(如.pgm)
src/:核心功能包源码目录
bot_navigation/:机器人导航相关功能
launch/:机器人建图导航等启动文件
amcl.launch:定位节点启动配置文件
ekf.launch:扩展卡尔曼滤波配置文件
gmapping.launch:Gmapping算法建图文件
localization.launch:配置机器人定位功能的核心启动文件
move_base.launch: 自主导航的路径规划与运动控制启动文件
navigation.launch: 集成化启动配置文件(包括:组合定位、路径规划和可视化模块)
save_map.launch: 配置并启动地图保存启动文件
mapps/:地图存放包
map.pgm:二进制图像文件,用于存储灰度图像数据。
map.yaml:机器人导航中的地图配置文件
param/:导航栈核心参数包
dr200/:存储机器人导航栈的核心参数配置文件
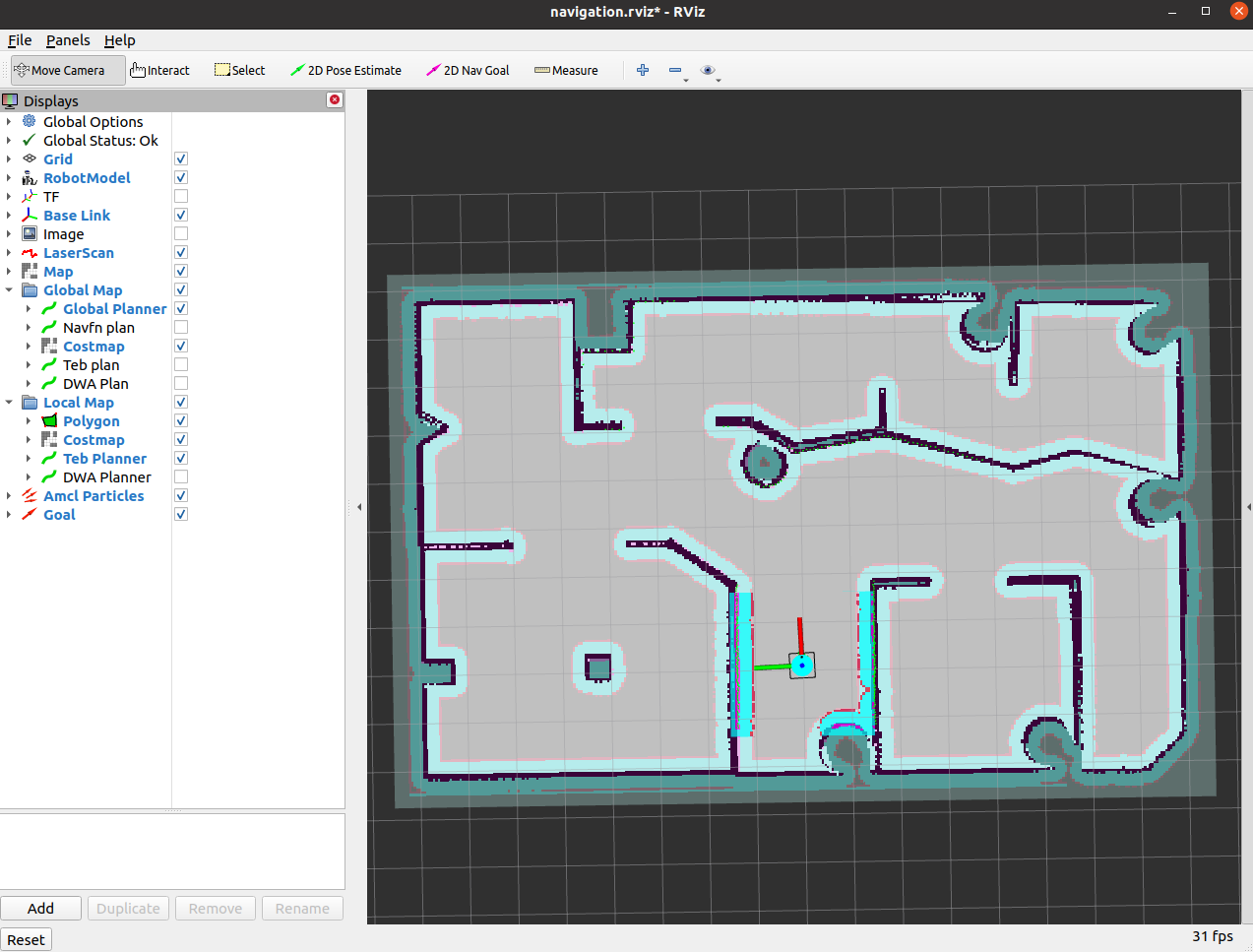
rviz/: 导航建图可视化界面配置文件
gmapping.rviz: 建图可视化界面配置文件
navigation.rviz: 导航可视化界面配置文件
scripts/: 地图保存等脚本文件
drivers/: 传感器底层驱动包
tools/:辅助工具或脚本(非ROS功能包)
2、 工程编译
# 从GitHub克隆
cd ~
git clone https://github.com/PlanRobotShenZhen/AutoTrack-IR-DR200.git catkin_ws
# 更新子模块
cd ~/catkin_ws && git submodule update --init --recursive
步骤2:安装系统依赖
### IMU
sudo apt-get install libqt5serialport5-dev
### Gmapping
sudo apt install ros-melodic-gmapping
sudo apt install ros-melodic-map-server
### navigation
sudo apt install ros-melodic-robot-localization
sudo apt install ros-melodic-robot-pose-ekf
sudo apt install ros-melodic-navigation
sudo apt install ros-melodic-navigation*
sudo apt install ros-melodic-move-base
sudo apt install ros-melodic-amcl
sudo apt install ros-melodic-dwa-local-planner
sudo apt install ros-melodic-teb-local-planner
步骤3:编译工程
# 清理之前的编译结果(如果存在),也可以用于检查是否缺少依赖
catkin_make clean
# 编译(单线程,避免依赖问题)
catkin_make -j1
# 重新加载环境
source ~/catkin_ws/devel/setup.bash
步骤4:串口设备配置
# 复制串口规则文件
sudo cp ./tools/serial/serial_rules/* /etc/udev/rules.d/
# 重新加载udev规则
sudo udevadm control --reload-rules
sudo udevadm trigger
# 将用户添加到dialout组(串口访问权限)
sudo usermod -aG dialout plan
sudo usermod -aG dialout root
# 重新登录或重启以使权限生效
AutoTrack-IR-DR200的仿真导航实验环境为高校机器人教育提供了一个完整、系统且易于使用的学习平台。通过这个平台,学生不仅可以学习机器人导航的基本原理,更能够通过亲手实践深入理解算法的实现细节和系统的工作机制。
从工程环境的搭建到算法的实际应用,从基础操作到高级调试,每一个环节都经过精心设计,既保证了学习的系统性,又确保了实践的可操作性。这种"学中做、做中学"的教学模式,极大地提高了学习效率和理解深度。
随着机器人技术的不断发展,这个仿真实验平台也将持续更新和完善,加入更多先进的算法和功能,为高校机器人教育提供更加优质的学习资源,助力培养具有创新能力和实践经验的机器人技术人才。