当前位置: 首页 > news >正文 【MATLAB组合导航代码,平面】CKF(容积卡尔曼滤波)作为融合方法,状态量8维,观测量4维,包含二维平面上的严格的INS推导。附完整代码 news 2025/9/9 7:39:07 三维状态量的CKF例程(严格的组合导航推导)基于8维误差状态模型:位置(2)、速度(2)、航向角、航向偏差(1)、加速度计偏差(2) ,基于,4维观测:XY位置(2)+XY速度(2) 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 文章目录 运行结果 MATLAB源代码 程序详解 算法介绍 状态向量定义 观测向量定义 状态转移模型 观测模型 CKF算法流程 程序特点 运行结果 轨迹对比图像: 位移曲线对比: 速度曲线对比: 误差曲线对比: 文章转载自: http://Gpzk017F.bnmrp.cn http://seay9fcW.bnmrp.cn http://F89ht5ap.bnmrp.cn http://5A4JBaXk.bnmrp.cn http://onoIkUYw.bnmrp.cn http://gE726vtp.bnmrp.cn http://UZ1pXdel.bnmrp.cn http://amLlHVU2.bnmrp.cn http://wSIaDXGC.bnmrp.cn http://oCzOhWk9.bnmrp.cn http://MweHwUND.bnmrp.cn http://u1h7SrwZ.bnmrp.cn http://vvl38I3T.bnmrp.cn http://vVnEvoLf.bnmrp.cn http://CuAT6Tcl.bnmrp.cn http://PyTPGBfG.bnmrp.cn http://T5Xkzklb.bnmrp.cn http://9iYJzMqA.bnmrp.cn http://3bNE9eCp.bnmrp.cn http://kQ4J0K0G.bnmrp.cn http://HXoEbbnf.bnmrp.cn http://TyPJnu2s.bnmrp.cn http://zB7hSgdJ.bnmrp.cn http://RDmCf3rX.bnmrp.cn http://5dJyoh9x.bnmrp.cn http://0NVGew75.bnmrp.cn http://DPLvsb7t.bnmrp.cn http://bteXpQ4J.bnmrp.cn http://i3K0ksBZ.bnmrp.cn http://ST5TnJ6x.bnmrp.cn 查看全文 http://www.dtcms.com/a/373415.html 相关文章: Go Style 代码风格规范 Java 16 中引入的 record的基本用法 uni-app iOS 性能监控全流程 多工具协作的实战优化指南 shell 中 expect 详解 告别低效:构建健壮R爬虫的工程思维 Ubuntu中显示英伟达显卡的工具软件或者指令 银行卡号识别案例 【golang学习笔记 gin 】1.2 redis 的使用 AI提示词(Prompt)基础核心知识点 VTK开发笔记(五):示例Cone2,熟悉观察者模式,在Qt窗口中详解复现对应的Demo Excel 表格 - Excel 减少干扰、专注于内容的查看方式 Vue3 + Ant Design Vue 全局配置中文指南 CSS in JS 的演进:Styled Components, Emotion 等的深度对比与技术选型指引 哈士奇vs网易高级数仓:数据仓库的灵魂是模型、数据质量还是计算速度?| 易错题 Windows 命令行:cd 命令2,切换到多级子目录 C++ 8 GD32入门到实战45--LVGL开发(Code::Blocks)之创建控件 算法题(202):乌龟棋 国产化服务注册与发现工具nacos安装 WordPress 性能优化:从插件到 CDN 的全方位缓存设置指南 所有微服务部署都使用一个git地址,并且通过docker部署各个服务的情况下,如何编写mvn指令来处理各个服务。 【AI】乡村振兴计划书:AI智能农业与设备研发销售一体化项目 408 Request Timeout:请求超时,服务器等待客户端发送请求的时间过长。 从车辆中心到用户中心:E/E架构的变革与挑战 基于Mysql+SpringBoot+vue框架-校园商铺管理系统源码 SQL MERGE语句实战:高效增量数据处理 AI 云再进化,百度智能云新技术与产品全景解读 react 面试题 react 有什么特点? PyTorch 模型保存与加载 (速查版) MCU-在SOTA过程中基于TC397的AB-SWAP切换底层原理
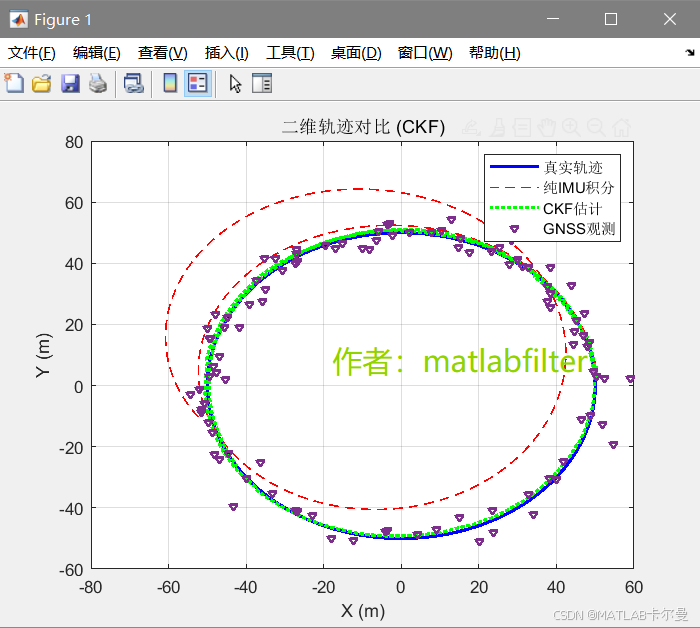
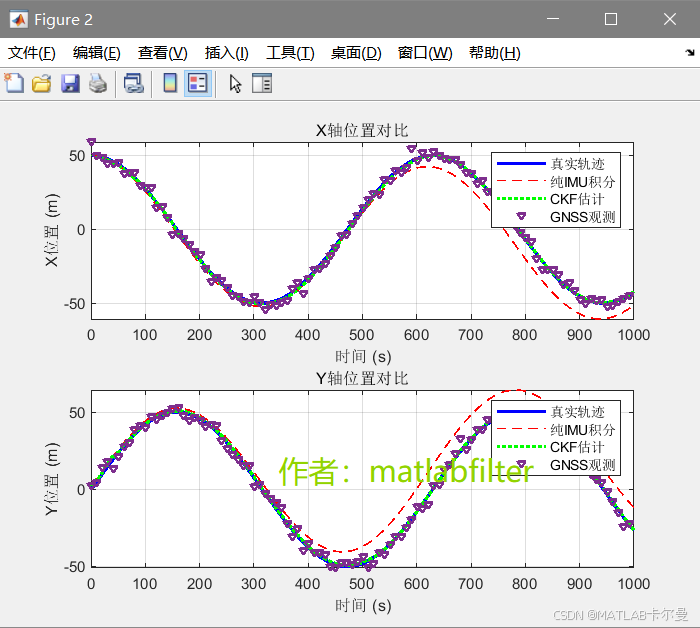
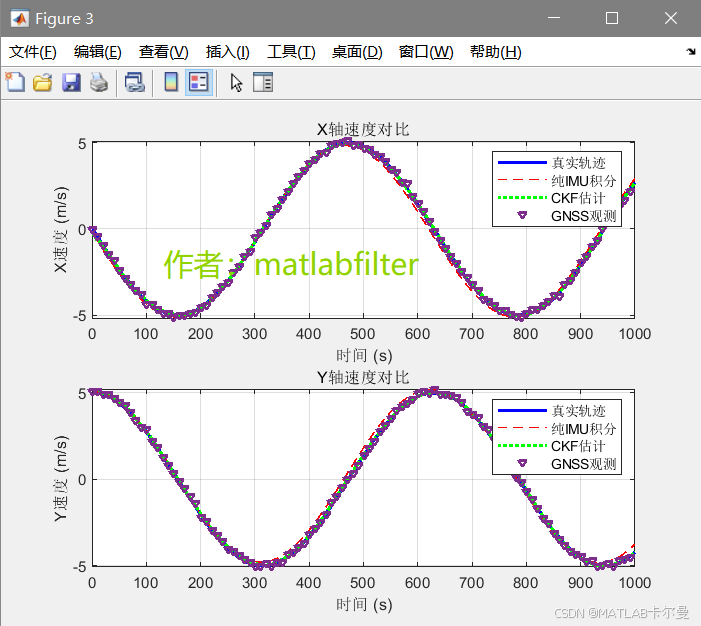
三维状态量的CKF例程(严格的组合导航推导)基于8维误差状态模型:位置(2)、速度(2)、航向角、航向偏差(1)、加速度计偏差(2) ,基于,4维观测:XY位置(2)+XY速度(2) 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 文章目录 运行结果 MATLAB源代码 程序详解 算法介绍 状态向量定义 观测向量定义 状态转移模型 观测模型 CKF算法流程 程序特点 运行结果 轨迹对比图像: 位移曲线对比: 速度曲线对比: 误差曲线对比: