GMSL(Gigabit Multimedia Serial Link)全解析:从车载到工业视觉的高速传输利器

【硬核干货】GMSL(Gigabit Multimedia Serial Link)全解析:从车载到工业视觉的高速传输利器
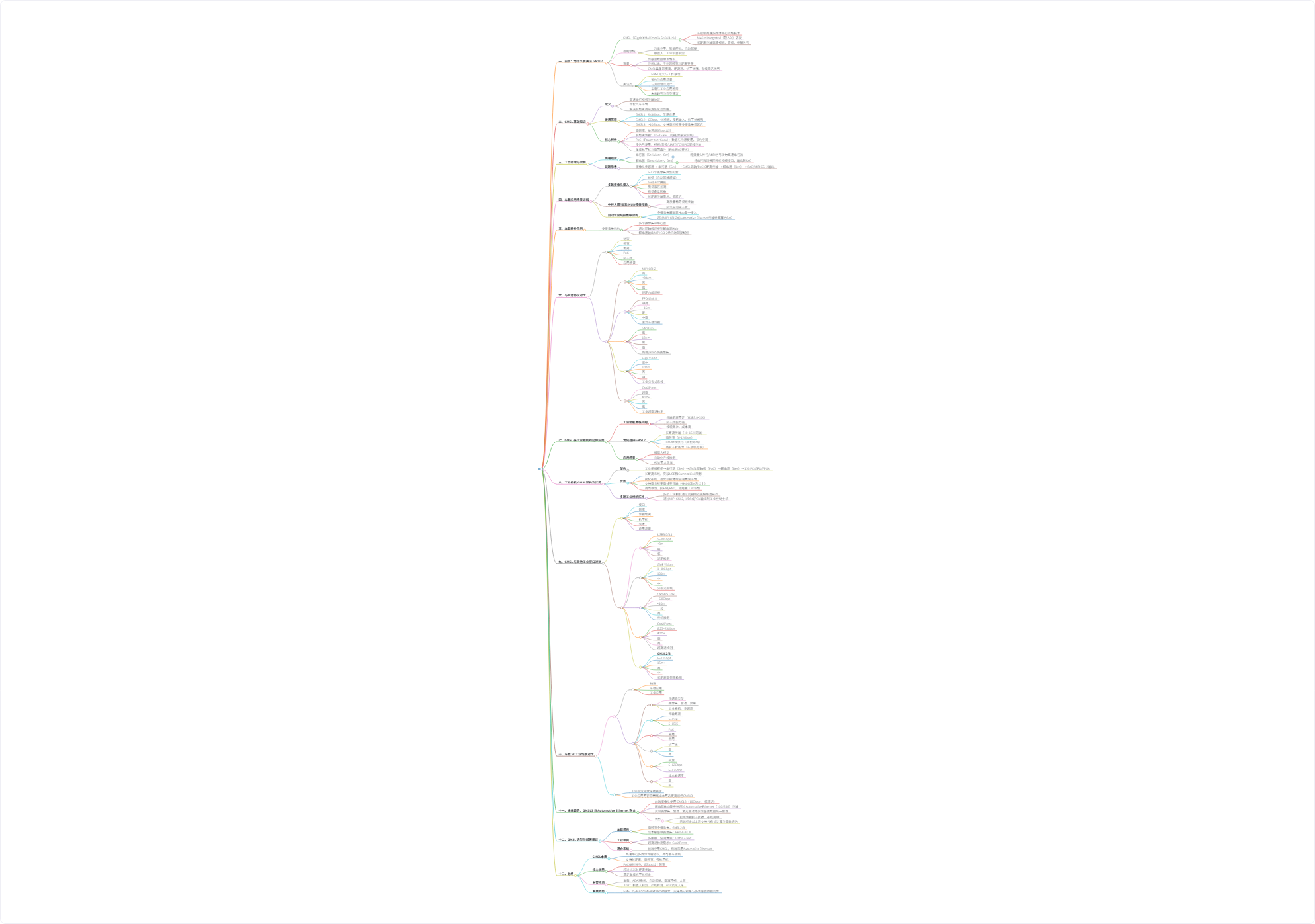
文章目录
- 【硬核干货】GMSL(Gigabit Multimedia Serial Link)全解析:从车载到工业视觉的高速传输利器
- 一、前言:为什么要关注 GMSL?
- 二、GMSL 基础知识
- 1. 定义
- 2. 发展历程
- 3. 核心特性
- 三、工作原理与架构
- 基本链路示意图
- 四、车载应用场景详解
- 1. 多路摄像头接入 (环视 + ADAS)
- 2. 中控大屏 / 仪表 / HUD 视频传输
- 3. 自动驾驶域控集中架构
- 五、车载拓扑示例
- 多摄像头拓扑
- 六、与其他协议对比
- 七、GMSL 在工业相机的延伸应用
- 1. 为什么工业相机会选择 GMSL?
- 2. 工业相机 GMSL 架构
- 3. 工业使用优势
- 4. 工业部署示意图(多路相机)
- 八、GMSL vs 其他工业接口选型
- 九、车载 vs 工业场景的对比
- 十、未来趋势:GMSL3 + Automotive Ethernet 融合
- 十一、GMSL 选型与部署建议
- 十二、总结
关键字:
工业知识点、
GMSL、
ADAS、
HUD、
视觉
一、前言:为什么要关注 GMSL?
如果你接触过汽车电子、智能座舱、自动驾驶,甚至工业机器视觉,你很可能听到过一个协议缩写——GMSL。
GMSL,全称 Gigabit Multimedia Serial Link,是 Maxim Integrated(现已并入 ADI)的车规级高速多媒体串行链路技术,用于远距离传输高清视频、音频和控制信号。它源于汽车行业,但正在向机器人、工业视觉等领域延伸。
在这个“数据为王”的时代,不论是智能汽车还是智能工厂,传感器(尤其是摄像头)产生的数据量都在爆发式增长,传统 USB、千兆网在带宽、延迟和可靠性上的瓶颈逐渐暴露,而 GMSL 在带宽、传输距离、抗干扰与布线简洁性上有很强的综合优势。
今天这篇文章,我们将一次性搞懂:
- GMSL 是什么、怎么工作
- 架构 & 应用场景
- 与 MIPI、FPD-Link、CoaXPress 等接口的对比
- 在车载与工业相机上的使用差异
- 未来趋势及选型建议
二、GMSL 基础知识
1. 定义
GMSL(Gigabit Multimedia Serial Link) 是 Maxim Integrated 研发的一种高速串行视频传输协议,专为汽车环境优化,后续版本提升了传输速率,并加入更多信号复用能力。它解决了车载摄像头与 ECU(电子控制单元)之间长距离、高带宽、低延迟传输的问题。
2. 发展历程
- GMSL1:最高约 3Gbps,早期环视/倒车影像
- GMSL2:提升到 6Gbps,4K 视频传输、多路输入、抗干扰增强
- GMSL3:>10Gbps,面向自动驾驶高分辨率、多摄像头低延迟需求
3. 核心特性
- 高带宽:单通道可达 6Gbps+,通过聚合可更高
- 长距离:支持 10~15 米甚至更长(同轴或屏蔽双绞线)
- PoC(Power over Coax):数据与电源共线,节约空间
- 多信号复用:视频、音频、UART、I²C、GPIO 同路传输
- 车规级抗干扰与可靠性:满足严苛 EMI/EMC 要求
三、工作原理与架构
GMSL 系统通常由两端组成:
- 串行器(Ser, Serializer):将摄像头的并行/MIPI 视频信号打包成高速串行流
- 解串器(Des, Deserializer):将串行流还原成传统视频接口输出到 SoC
基本链路示意图
code
[ 摄像头传感器 ]│├── (MIPI CSI-2 / 并行接口)▼
┌─────────────┐
│ 串行器 Ser │
└─────────────┘│├── (GMSL, 同轴/PoC, 长距离)▼
┌─────────────┐
│ 解串器 Des │
└─────────────┘│├── (MIPI CSI-2 / LVDS)▼
[ ECU / SoC主机 ]
四、车载应用场景详解
1. 多路摄像头接入 (环视 + ADAS)
现代汽车通常装备至少 6-12 个摄像头:
- 前视(自动驾驶感知)
- 环视(SVM,360° 拼接)
- 侧视(盲区监测)
- 后视(倒车影像)
每路摄像头到主机距离最长可达十几米,需要高带宽、低延迟的传输,GMSL + PoC 单线方案刚好满足。
2. 中控大屏 / 仪表 / HUD 视频传输
GMSL 可高质量传输视频信号到显示屏,确保在电磁干扰复杂的汽车环境中仍有稳定画质。
3. 自动驾驶域控集中架构
多路摄像头直接接入域控的解串器Hub,再通过 MIPI CSI-2 或 Automotive Ethernet 传给高算力SoC做融合感知。
五、车载拓扑示例
多摄像头拓扑
code
前视Cam 左视Cam 右视Cam 后视Cam╲ │ │ ╱
串行器 串行器 串行器 串行器╲ │ │ ╱
同轴线 同轴线 同轴线 同轴线╲ │ │ ╱解串器Hub│MIPI CSI-2│自动驾驶域控
六、与其他协议对比
| 协议 | 带宽 | 距离 | PoC | 抗干扰 | 应用场景 |
|---|---|---|---|---|---|
| MIPI CSI-2 | 高 | <30cm | 否 | 弱 | 短距内部连接 |
| FPD-Link III | 中高 | ~15m | 是 | 中高 | 主流车载传输 |
| GMSL2/3 | 高 | 15m+ | 是 | 高 | 高端/ADAS多摄 |
| GigE Vision | 低中 | 100m | 否 | 中 | 工业分布式布线 |
| CoaXPress | 超高 | 40m+ | 否 | 高 | 工业超高速检测 |
七、GMSL 在工业相机的延伸应用
1. 为什么工业相机会选择 GMSL?
传统工业相机常用的接口有 USB3.0/3.1、GigE Vision、Camera Link、CoaXPress 等,这些接口各有优缺点,但在某些关键场景下存在痛点:
- 传输距离限制(USB3.0 一般 ❤️ 米)
- 抗干扰差(工业现场电机、焊机、变频器等干扰源强)
- 布线复杂(多根线缆 + 电源线)
- 成本高(CoaXPress 虽然性能强,但成本和配套设备昂贵)
而 GMSL 本身是车规级高速视频传输技术,具备:
- 长距离传输能力(10~15 米同轴)
- 高带宽(6Gbps~12Gbps)
- PoC 单线供电(一根线搞定电源 + 数据 + 控制)
- 强抗干扰能力(汽车环境比很多工业现场还恶劣)
因此,越来越多工业相机厂商开始推出 GMSL 接口版本,尤其应用在机器人视觉、自动化产线检测、AGV/无人叉车等场景。
2. 工业相机 GMSL 架构
code
[ 工业相机模组 ]│ (MIPI CSI-2 / LVDS)▼
┌───────────┐
│ 串行器 (Ser)│
└───────────┘││ (GMSL, 同轴, 支持PoC)│▼
┌───────────┐
│ 解串器 (Des)│
└───────────┘││ (MIPI CSI-2 / LVDS / PCIe)▼
[ 工业PC / GPU / FPGA ]
3. 工业使用优势
- 长距离布线:解决 USB、Camera Link 的距离短问题。
- 布线简化:PoC 单线供电减少线束,适合机械臂等空间受限设备。
- 高带宽:支持高分辨率、高帧率传输(例如 4K@60fps)。
- 高可靠性:抗 EMI/EMC 干扰,适合重工业、焊接、冲压等环境。
4. 工业部署示意图(多路相机)
code
工业相机1 ─┐
工业相机2 ─┼─ 同轴线 (PoC)
工业相机3 ─┤
工业相机4 ─┘│
┌──────────────┐
│ 解串器Hub │ ← 支持多路GMSL输入
└───────▲──────┘│ MIPI CSI-2 / LVDS / PCIe▼
[ 工业PC / 工控机 / GPU服务器 ]
八、GMSL vs 其他工业接口选型
| 接口 | 带宽 | 距离 | 抗干扰 | 成本 | 适用场景 |
|---|---|---|---|---|---|
| USB3.0/3.1 | 5~10Gbps | <3m | 弱 | 低 | 近距检测 |
| GigE Vision | 1~10Gbps | 100m | 中 | 中 | 分布式布线 |
| Camera Link | ~6.8Gbps | <10m | 一般 | 高 | 传统检测 |
| CoaXPress | 6.25~25Gbps | 40m+ | 高 | 高 | 超高速检测 |
| GMSL2/3 | 6~12Gbps | 15m+ | 高 | 中 | 长距高带宽检测、机器人视觉 |
九、车载 vs 工业场景的对比
| 特性 | 车载应用 | 工业应用 |
|---|---|---|
| 传感器类型 | 摄像头、雷达、屏幕 | 工业相机、传感器 |
| 距离 | 5~15m | 5~15m |
| PoC | 常用 | 常用 |
| 抗干扰 | 高 | 高 |
| 带宽 | 6~12Gbps | 6~12Gbps |
| 成本敏感度 | 高 | 中 |
结论:工业视觉对 GMSL 的需求基本延续了车载的长距离、高带宽、抗干扰要求,只是成本敏感度稍低,可以选择更高规格的 GMSL3 系列。
十、未来趋势:GMSL3 + Automotive Ethernet 融合
下一代工业与车载系统,可能会出现这样的融合架构:
- 摄像头 → GMSL3(10Gbps+,低延迟)
- 解串器Hub → Automotive Ethernet(10G/25G)
- 域控/工业服务器统一接收来自摄像头、雷达、激光雷达等多源数据
这样做的好处是:
- 前端传输仍然用抗干扰强、布线简便的 GMSL
- 后端使用标准化以太网,方便与分布式计算节点通信
十一、GMSL 选型与部署建议
- 车载项目
- 高带宽多摄像头:GMSL2/3
- 成本敏感单摄像头:FPD-Link III
- 工业项目
- 多相机、空间受限:GMSL + PoC
- 超高速检测:CoaXPress
- 混合系统
- 前端 GMSL,后端 Ethernet
十二、总结
- GMSL 本质:高速串行多媒体传输协议,车规级别,长距离、高带宽、抗干扰。
- 核心优势:PoC 单线供电、6Gbps+ 速率、15m+ 传输、车规抗干扰。
- 车载应用:ADAS、自动驾驶、环视系统、大屏显示。
- 工业应用:机器人视觉、产线检测、AGV/无人车。
- 未来趋势:GMSL3 + Automotive Ethernet 融合,支持更高分辨率与多传感器同步。
💡 如果你正在做 自动驾驶、智能座舱、机器人视觉、工业检测,GMSL 会是一个非常值得关注的接口技术。它可能不是每个项目的最佳选择,但在“多路摄像头 + 长距离 + 抗干扰 + 成本可控”的组合拳里,它很可能是 性价比最高的方案。