永磁同步电机 FOC 控制中 d、q 轴杂谈与角度偏移影响
一、基本公式概念
1.1 Clark 和 Park 变换公式
1.1.1 Clark 变换公式
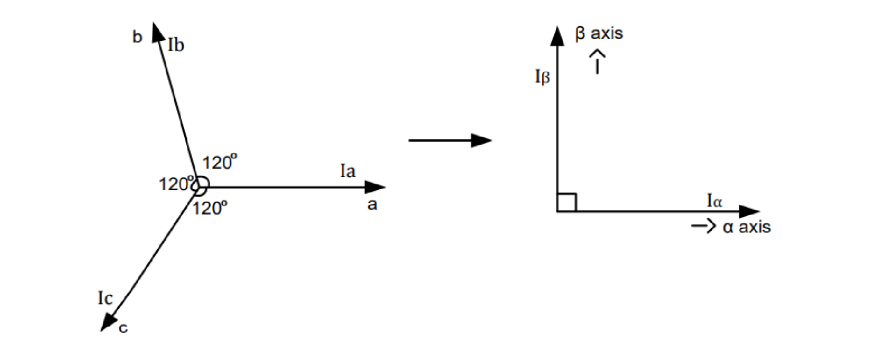
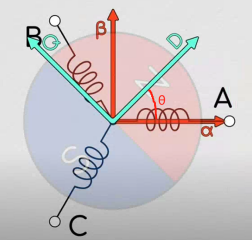
Clark 变化就是把三项电压矢量 (a、b、c) 的 120° 的电流分量,转化为两轴 (α、β) 90° 的电流分量。
这种变换的物理意义是:用两个正交分布的虚拟线圈(α 轴和 β 轴)模拟三相电机中 120° 分布的三个实际线圈的磁场效果。数学上,这种等效性保证了磁场合成的效果一致。
1.1.2 Park 变换
Clark 变化得到的 α、β 包括当前转子角度信息 θ。Park 变换后将 α、β 中的角度信息剔除即可得到 q、d 轴的值。
- d 轴 :(direct-axis) 与转子磁场方向重合,即沿转子磁极的中心线方向 (从 S 极指向 N 极) 。在永磁同步电机中,d 轴通常用于控制磁场的励磁分量。
- q 轴:垂直于转子磁场方向,即位于相邻磁极的垂直平分线上。其名称来源于 “quadrature” (正交),表示与 d 轴的电角度相差 90°。
简单来说,d 轴和转子 N 极磁铁方向重合,代表磁通分量;而 q 轴正交于 d 轴,和磁通无关只控制力矩。
1.2 id、iq 磁链公式
1.2.1 磁链
磁链(Magnetic Flux Linkage)表示穿过导电线圈的总磁通量,在电路中,磁链与电流(I)通过电感(L)关联:
= 电感值
= 电流值
1.2.2 三项磁链方程
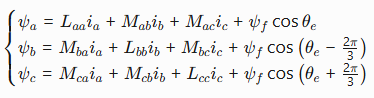
、
、
= 转子永磁体磁链常数
、
、
、
、
= 相间互感,对称系统中
、
、
= 三项定子电流
= 永磁体磁链幅值 (常数)
= 转子 d 轴与 A 相绕组的电角度
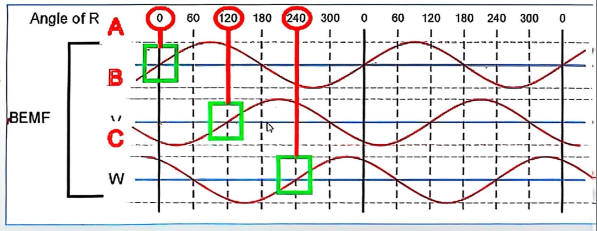
对于 B、C 相的反电动势和角度的关系正好是相差 120°,所以上述公式需要减去和加上 。
1.2.3 d、q 轴下的磁链方程
三项磁链方程太过于复杂,我们不考虑自感和互感等因素,并且将这个公式转化为 d、q 轴下的方程。因为 d、q 轴剔除了角度参数,所以 d、q 的下的磁链方程很简单。
= d、q 轴电感
= d、q 轴电感
2.1 转矩方程
电机的转矩方程如下:
= d 轴电感
= q 轴电感
= 磁链常数
= 极对数
= 电机转矩
对于表贴式电机 (SPMSM),因为它的 d、q 轴电感几乎相等,所以转矩公式被简化成了这样:
二、为什么 id 代表磁链,而 iq 代表力矩
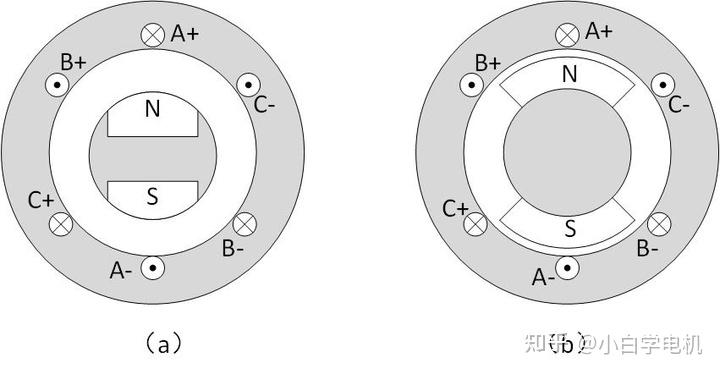
永磁体磁导率相当于空气,而铁的导磁率约为 200~400 Ur 。对于表贴式电机来说 ,它的 d 轴方向和 q 轴方向用铁量一样多,所以 d 轴和 q 轴的电感相等。
为了简化这个 id 和 iq 分量的问题,下文仅使 d、q 轴电感相等的表贴式电机分析。
d 轴是与转子磁场对齐的轴(d轴和转子磁铁正极方向相同),它代表了电机中的磁链的主要方向。在电机中,尤其是同步电机(如永磁同步电机、异步电机等),磁链的大小和方向决定了电机的磁耦合程度。
q 轴与 d 轴垂直,它代表了与转矩产生相关的部分。在 d-q 轴坐标系中,q 轴电流与电机的转矩密切相关。转矩是由定子电流与转子磁场的相对运动产生的,q 轴电流与转矩的产生有直接关系。
那么,我们在讨论磁链公式时,q 轴同样拥有单独的磁链值,这是怎么回事呢?
对于 id、iq,他们相差 90°,所谓 q、d 轴磁链就是在这两个角度下对转子的磁力强度。如果我们将磁通完美的施加到 d 轴上,这样转子是不会旋转的。只有施加到 q 轴上才能像胡萝卜一样牵引转子旋转,这也是因为表贴式电机保持 id=0 的控制的原因。
而我们根据表贴式电机 (Ld≈Lq) 力矩公式可得:
因此,转矩仅由交轴电流 iq 决定,与直轴电流 id 无关。
表贴式PMSM通常采用 id = 0 控制策略,以最大化单位电流下的转矩输出。
三、弱磁控制原理
3.1 弱磁概述
电机的转速上限,往往受直流母线电压限制。
在中低速时,电机产生的反电动势 (Back EMF) 还小,控制器能轻松加电流、加电压来驱动电机。但是当转速高了以后,电机定子绕组产生的反电动势会增大,接近甚至超过母线电压:
= 反电动势
= 电机角速度
弱磁的核心思想就是人为减小电机的等效磁链 ,从而降低反电动势
,让电机还能继续加速。
在 轴上注入一个负的
电流,这样在公式上就反应为:
-
= d、q 轴电感
根据此公式当 时,
变小,进而产生:
有效磁链减小 ⇒ 反电动势减小 ⇒ 需要的电压减小 ⇒ 电机还能继续提升转速。
3.2 弱磁的代价
根据电机力矩公式
-
削弱了磁链常数后,磁链变小,转矩能力变小,为了维持转矩,就需要更大的 。
高速弱磁区,电机效率一般比低速恒功率区低。
如下图所示,如果我们的 弱磁后在 C 点,那么
只能在 A 点才能保持较大的效率。
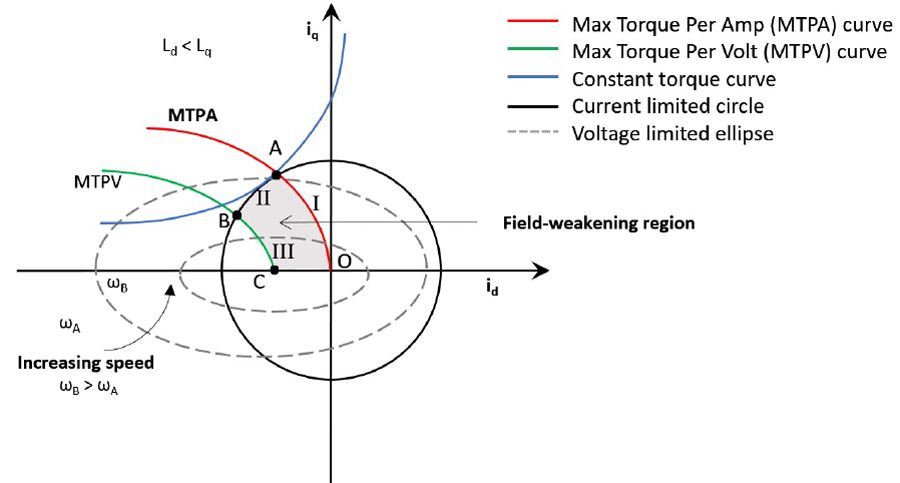
弱磁控制就是通过在 d 轴注入负电流抵消部分磁链,降低反电动势,从而突破电压限制,让电机在额定转速以上还能继续高速运行,但转矩会下降。
四、控制角度偏移对 id、iq 的影响
请注意,FOC 控制中的角度指的是 d 轴的角度,q 轴角度要比 d 轴小 90°。
4.1 电流环开环情况
我们将 d、q 轴电流用 RTT 打印出来后就赋值成 0,这样对于 FOC 框架来说,d、q 轴就一直是 0,相当于是电流环在开环跑。
FOC 框架会将 d 轴 0 输出 (因为我们是 id = 0 目标控制,当前反馈被强制设为 0,所以自然就是 0 输出了),q 轴的 pi 调节因为反馈一直是 0,但是目标值却不是 0,所以 q 轴输出会最大。
Rttstru.data0 = t_Park_CurRegS.s32_Qs;
Rttstru.data1 = t_Park_CurRegS.s32_Ds;
SEGGER_RTT_Write(1, &Rttstru, 8);t_Park_CurRegS.s32_Qs = 0;
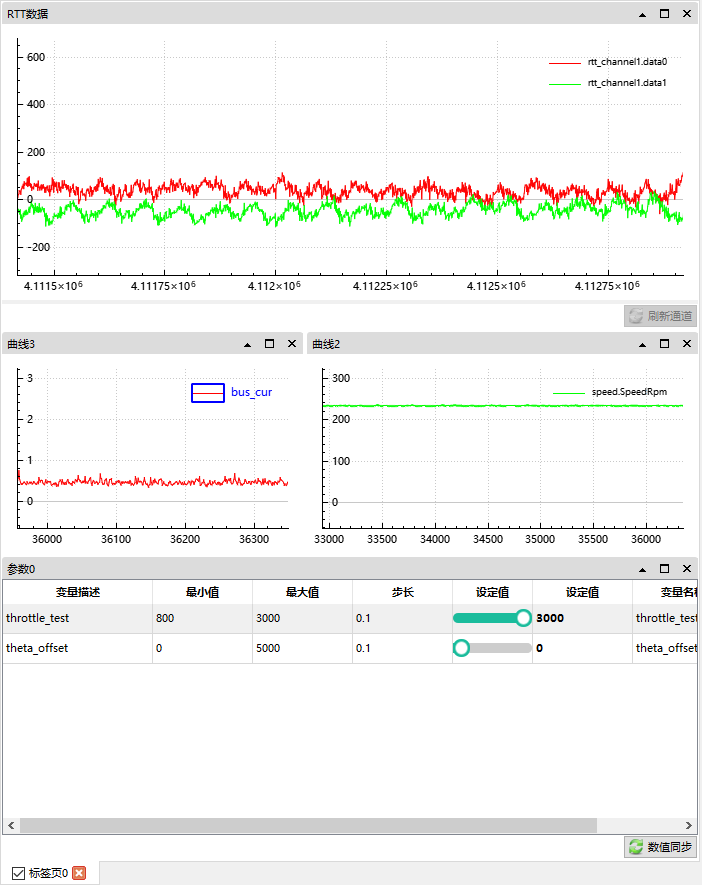
t_Park_CurRegS.s32_Ds = 0;在在下图中:
| rtt_channel1.data0 | q 轴电流 (红色) |
| rtt_channel1.data1 | d 轴电流 (绿色) |
| bus_cur | 母线电流 (单位 A) |
| speed.SpeedRpm | 转速 (单位Rpm) |
| theta_offset | 角度偏移 (可调节值) |
4.1.1 不偏移角度情况
根据图片可观察到:
此时电机空转无负载。
我们可以观察到当前 q 轴电流略高于 d 轴;
母线电流 0.5A;
电机转速在 230 Rpm;
角度偏移为 0;
4.1.2 角度正向偏移情况
我们将角度从 0 偏移增至 5000 时,d 轴被自然削弱 (因为此时 q 轴产生了向 d 轴的偏差,d 和 q的偏差将小于 90°)。
根据 gif 图可知:
正向偏差角度越大, d 轴反馈越小;
母线电流从 0.5A 升到了 5A,
速度从 230 Rpm 升到了 500;
我们可以近似的看作当时电机通过偏移角度实现了弱磁。
4.1.3 角度反向偏移情况
我们将角度从 0 偏移增至 -3000 时,d 轴被自然增大 (因为此时 q 轴产生了向 d 轴的偏差,d 和 q的偏差将小于 90°)。
根据 gif 图可知:
反向偏差角度越大, d 轴反馈越大;
母线电流从 0.5A 升到了 3A;
速度从 230 Rpm 降低到了 200;
我们可以近似的看作当时电机通过偏移角度实现了增磁,这样可以增加电机的力矩。
4.2 电流环闭环情况
在下面的实例中加入了电流闭环,此时就是正常的电机控制流程了。
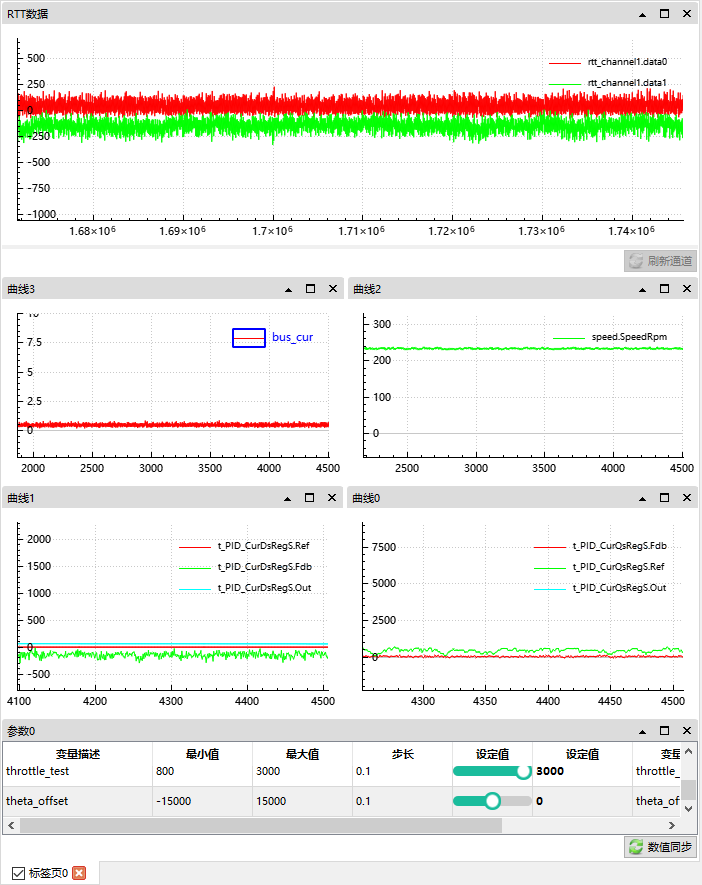
4.2.1 不偏移角度情况
按这个案例中我们比之前的调试加入了 d 轴和 q 轴的 PI 反馈、目标和输出。
此时电机空转无负载。
我们可以观察到当前 q 轴电流略高于 d 轴;
母线电流 0.5A;
电机转速在 230 Rpm;
角度偏移为 0;
d 轴目标为 0,反馈为负 -200 左右,输出为 50;
q 轴目标为 500 左右,反馈为 50左右,输出为 20000;
4.2.2 角度正向偏移情况
此时电机空转无负载。
我们可以观察到正向偏移越大,q 轴偏移越大,d 轴少量的缩小。
母线电流从 0.5A 升至 4A;
电机转速在 230 Rpm 后轻微上升;
角度偏移从 0 至 13000;
d 轴目标为 0,反馈为负 -200 左右至 -1000 左右,输出逐渐增大,直到 10000 最大值;
q 轴目标为 2000 左右,反馈为 1000 左右有减小趋势,输出开始最大 20000,后逐渐减小;
由以上观察可以得到结论,如果在电流闭环的情况下,输入角度与实际值有偏差会导致 d 轴产生偏差,但是我们仍以 id = 0 调节,这样 FOC 就会浪费多余的能量去纠正 d 轴,进而导致电机效率的降低。
我们根据这个实验仍可以看到,FOC 即使是在角度产生较大偏移的情况,q、d 轴的 PI 调节仍然将电机转速稳定到目标值,但是其代价电流升至 4A。
4.2.3 角度反向偏移情况
此时电机空转无负载。
我们可以观察到反向偏移越大,q 轴偏移越大,d 轴也是。
母线电流从 0.5A 升至 6A;
电机转速在 230 Rpm 后轻微下降;
角度偏移从 0 至 -12000;
d 轴目标为 0,反馈为负 -200 左右升至 2000 左右,输出逐渐减小,直到 -15000 最小值;
q 轴目标和反馈一起升高,输出最大 20000;
和角度正向偏移情况完全相反,比较有意思的地方是 d 轴输出到了我们人为设定最小值 -15000 之后,q、d 轴和母线电流急剧升高,说明 FOC框架的 PI 调节已经无法纠正这样的错误了。