探讨Xsens在人形机器人研发中的四个核心应用
探索Xsens动作捕捉如何改变人形机器人研发——使机器人能够从人类运动中学习、更直观地协作并弥合模拟与现实世界之间的差距。人形机器人技术是当今世界最令人兴奋且最复杂的前沿领域之一。研究人员不仅致力于开发能够像人类一样行走和行动的机器人,还致力于开发能够实时学习、协作和适应的机器人。要实现这些目标,需要对人体运动有深入的理解—而这正是Xsens惯性运动捕捉技术发挥关键作用的地方。
下面,我们将探讨Xsens在机器人研发中的四个核心应用,每个应用都由真实的研究和实际项目支持。
1. 利用动作捕捉数据训练机器人的人工智能和机器学习模型
机器学习 (ML) 和人工智能 (AI) 正在改变机器人学习、规划和与世界互动的方式。实现这一转变的关键因素之一是获取高质量的运动数据,而这正是Xsens的优势所在。这些运动数据对于训练机器人领域的 AI 算法、强化学习模型和神经网络至关重要。
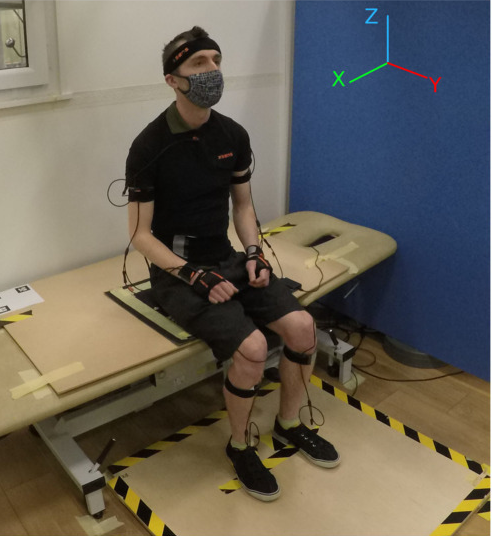
Xsens运动捕捉系统可生成丰富的带时间戳的数据集,包括关节角度、肢体轨迹、身体方向等。这些数据集可以作为机器学习模型的宝贵输入,从而实现更具适应性、更自然、更智能的机器人运动。
由于Xsens可穿戴且无需标记,研究人员可以在现实环境中(而不仅仅是实验室)收集训练数据,从而获得更强大、更可部署的模型。
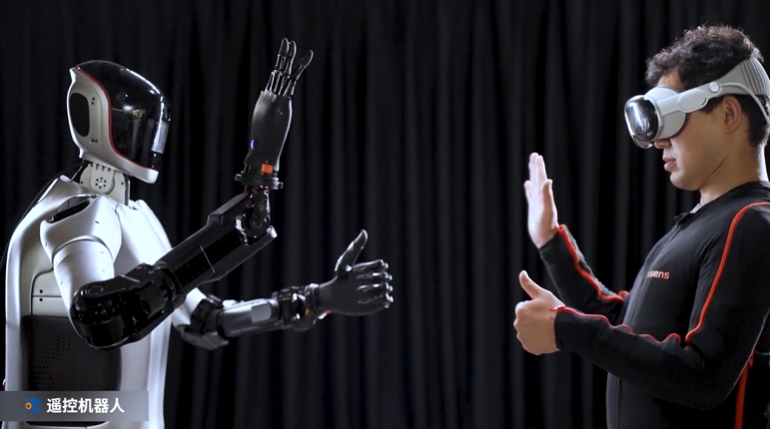
2. 创建人机控制系统
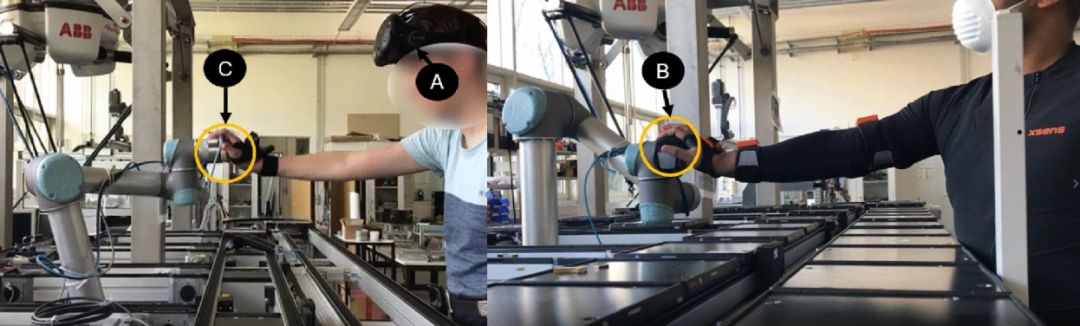
无论在制造、医疗还是服务环境中,当人类与机器人进行物理协作时,机器人必须能够高保真度和高响应度地理解人体运动。动作捕捉在这些系统中发挥着至关重要的作用。
研究弓箭手利用Xsens技术开发了自适应控制系统,使机器人能够感知人类姿势、预测动作并做出安全响应。其中一个例子就是意大利理工学院开发的自适应协作界面 (ACI),旨在促进人机系统之间更安全、更直观的物理交互。Xsens的惯性传感器用于将全身运动传输到该框架中,以实现协作任务。
3. 通过模仿人类动作训练机器人(从演示中学习)
在现代机器人技术中,通过演示来教授机器人(也称为模仿学习或从演示中学习 (LfD))是一种日益增长的趋势。开发人员无需手动编写每个行为的程序,而是可以使用动作捕捉来向机器人展示如何行动,从而使其能够从示例中学习复杂的任务。
借助 Xsens,研究人员可以记录人体全身运动并将其转化为机器人行为。
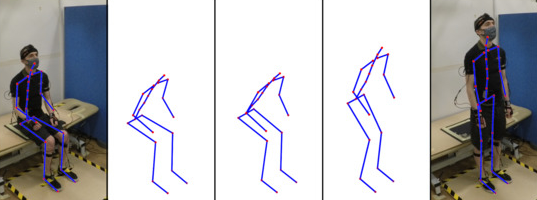
上海人形机器人项目展示了人形机器人如何通过直接分析Xsens传感器捕捉到的人体运动数据,学习像人类一样移动。这使得生成流畅、类似人类的动作成为可能。

4. 将人类运动映射到机器人上
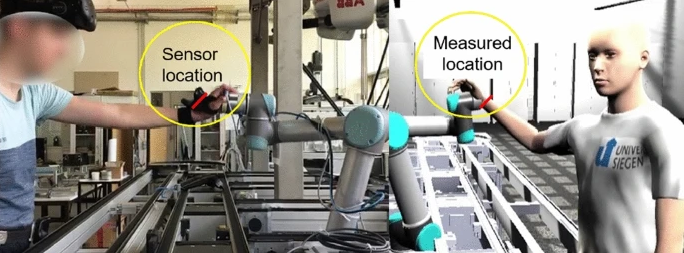
将人体运动映射到机器人肢体是机器人研发领域的常见挑战。运动捕捉数据可用于精准捕捉人体的自然运动,并解决如何将这种运动转化为具有不同物理约束或能力的机器人的动作。
在一项旨在将人类手臂运动映射到冗余机器人机械手的研究中,基于IMU的数据(例如来自Xsens的数据)有助于推导关节配置和末端执行器路径。这种映射是远程操作、机器人技能学习和运动重定向的基础。
结论:真实的人类运动——真正的机器人智能
Xsens 使机器人专家能够超越模拟和代码,从真实的人类运动中学习,验证物理交互,并创造出在现实世界中行为更自然的机器人。无论是用于协作控制、模仿学习还是运动映射,动作捕捉正成为机器人专家工具包中不可或缺的一部分。
关于搜维尔科技
搜维尔科技作为Xsens动作捕捉系统的中国大陆代理商全力为您提供优质服务。我们希望将更多标杆级与应用尖端技术的科技产品带入到蓬勃发展的国内市场中,以协助更多企业与高校拓展技术开发、探索创新领域。