论文Review Registration VGICP | ICRA2021 | 经典VGICP论文
基本信息
题目:Voxelized GICP for Fast and Accurate 3D Point Cloud Registration
来源:ICRA2021
学校:日本国家先进工业科学技术研究院
是否开源:https://github.com/koide3/fast_gicp
https://github.com/koide3/small_gicp
摘要:GICP、VGICP
本文提出了一种快速精确的三维点云配准的体素化广义迭代最近点( VGICP )算法。该方法扩展了基于体素化的广义迭代最近点( GICP )方法,在保持精度的同时避免了代价高昂的最近邻搜索。与从点位置计算体素分布的正态分布变换( NDT )不同,我们通过聚合体素中每个点的分布来估计体素分布。体素化方法允许我们高效地并行处理优化,所提出的算法可以在CPU上运行30 Hz,在GPU上运行120 Hz。 通过在模拟和真实环境中的评估,我们证实了所提算法的精度与GICP相当,但明显快于现有方法。这将有助于开发实时三维LIDAR应用,这些应用要求对LIDAR帧之间的相对位姿进行极快的评估。
Introduction
三维点云配准是许多三维激光雷达(LIDAR)应用中的核心任务,例如校准、定位、地图构建和环境识别。点云配准的目标是将两组点云(通常是源点云和目标点云)对齐,找到它们之间的空间变换(旋转和平移)。目前,两种流行的点云配准方法是:
- 广义迭代最近点(GICP) GICP是对经典迭代最近点(ICP)算法的扩展,通过分布到分布(distribution-to-distribution)的比较方式提高配准精度。GICP假设点云中的点具有局部协方差结构,利用这些分布信息进行更精确的点对齐。
- 正态分布变换(NDT) NDT通过体素化(voxelization)方法避免了昂贵的最近邻搜索,从而提高处理速度。它将点云分割成体素网格,为每个体素中的点拟合正态分布,然后通过最大化点在这些分布下的似然来对齐点云。
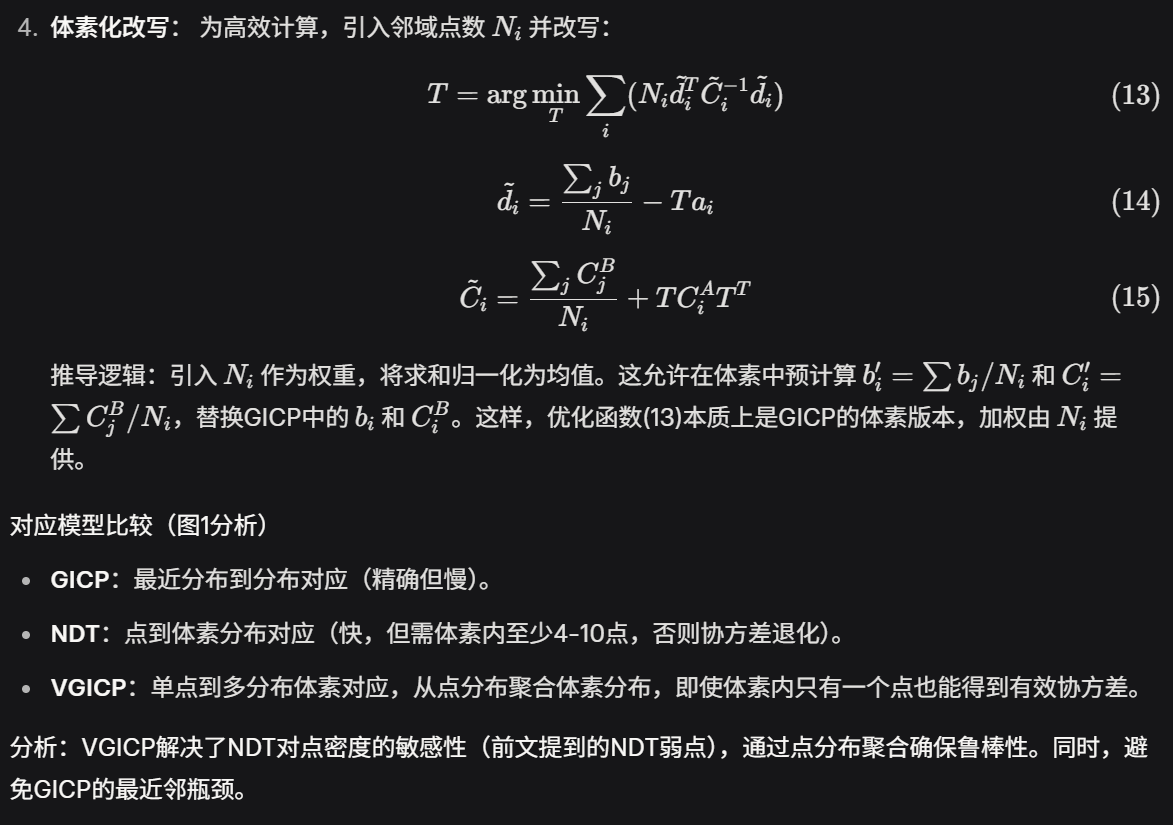
两种方法的局限性
- GICP的局限性: GICP依赖于最近邻搜索来关联点对,这在点云规模较大时计算成本高,尤其在计算资源有限的设备上难以实现实时处理。此外,最近邻搜索涉及大量条件分支,不适合在GPU上优化。
- NDT的局限性: NDT的性能高度依赖于体素分辨率的选择。体素分辨率需要根据环境和传感器特性进行仔细调整。如果分辨率选择不当,NDT的配准精度会显著下降。
论文提出的解决方案
论文提出了一种新的算法——Voxelized GICP(VGICP),结合了GICP的高精度和NDT的高效体素化方法。VGICP通过体素化技术实现并行计算,显著提高了处理速度,同时通过多点分布聚合方法(multi-point distribution aggregation)增强了对体素分辨率变化的鲁棒性。VGICP能够在CPU上以30Hz、GPU上以120Hz的速率处理包含15,000个点的点云。
论文的主要贡献
- 多点分布聚合方法:提出了一种从体素内少量点中稳健估计体素分布的方法,使得算法对体素分辨率变化更鲁棒。
- VGICP算法:提出了一种兼具GICP精度和更高处理速度的点云配准算法。
- 公开实现:提供了VGICP和并行化GICP的开源实现,供研究社区使用。
Related Works
A. GICP
GICP是经典ICP算法的变种之一。经典ICP通过迭代寻找点对并最小化点间距离来对齐点云,而GICP通过分布到分布的匹配方式改进了精度。它假设每个点具有局部协方差矩阵,并利用这些分布信息进行更精确的对齐。然而,GICP依赖于最近邻搜索(通常使用KD树),这在点云规模较大时成为计算瓶颈。此外,最近邻搜索的条件分支使其不适合GPU优化。
B. NDT
NDT通过体素化避免了最近邻搜索的开销。它将点云分割成体素网格,为每个体素中的点拟合正态分布,然后通过最大化点在这些分布下的似然来对齐点云。NDT的变种D2D-NDT(分布到分布NDT)对源点云和目标点云都进行体素化,并计算体素分布之间的距离,其精度优于经典NDT。然而,NDT的精度对体素大小敏感,需根据环境和传感器特性仔细调整体素分辨率。一些改进方法(如多分辨率NDT和三线性体素平滑)试图增强鲁棒性,但以牺牲处理速度为代价。
C. 基于特征的配准
基于特征的配准方法首先从点云中提取关键特征(如平面、边缘、FPFH、SHOT等),然后通过特征对应估计变换。这些方法对初始位姿误差较为鲁棒,有些甚至无需初始猜测。然而,由于仅使用有限数量的特征,基于特征的方法精度通常低于基于点的配准方法(如GICP或NDT)。在实际应用中,通常先使用基于特征的方法进行粗配准,再结合基于点的精细配准。
D. 基于深度神经网络的配准
近年来,深度神经网络在点云配准领域受到关注。一些工作提出网络提取局部鲁棒描述符,另一些则直接回归点云间的相对位姿。这些方法在噪声和初始位姿误差方面表现鲁棒,并能利用GPU加速。然而,其配准精度通常不如传统几何方法(如GICP)。因此,深度学习方法常与基于点的配准方法结合使用,例如在激光雷达里程计估计中结合ICP进行精化。
Method
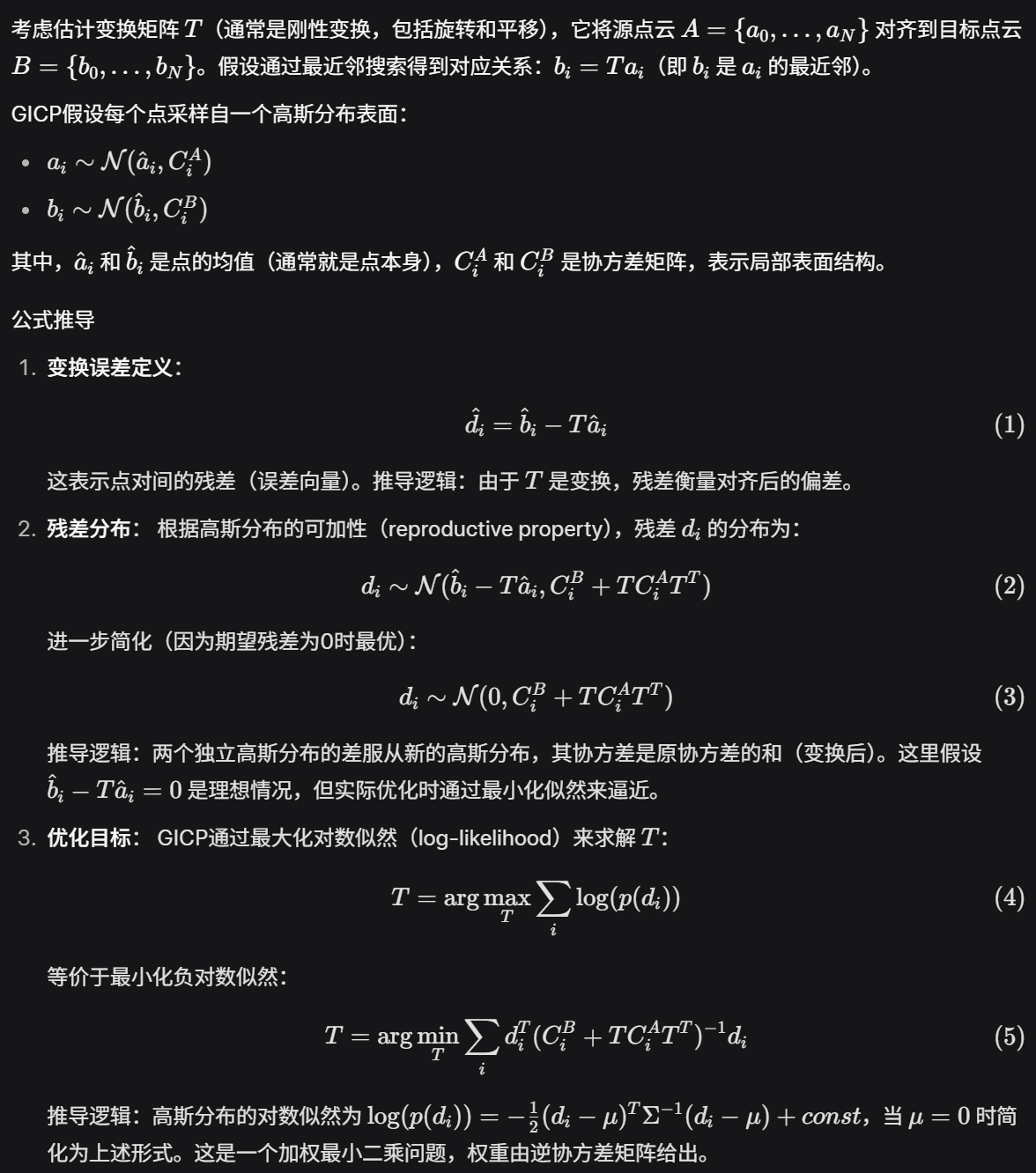
A. GICP algorithm
GICP(Generalized Iterative Closest Point)是经典ICP算法的扩展,它将点云配准问题建模为分布到分布的匹配,而不是简单的点到点距离最小化。这部分回顾了GICP的核心数学框架,为后续VGICP的扩展奠定基础。
B. Voxelized GICP algorithm
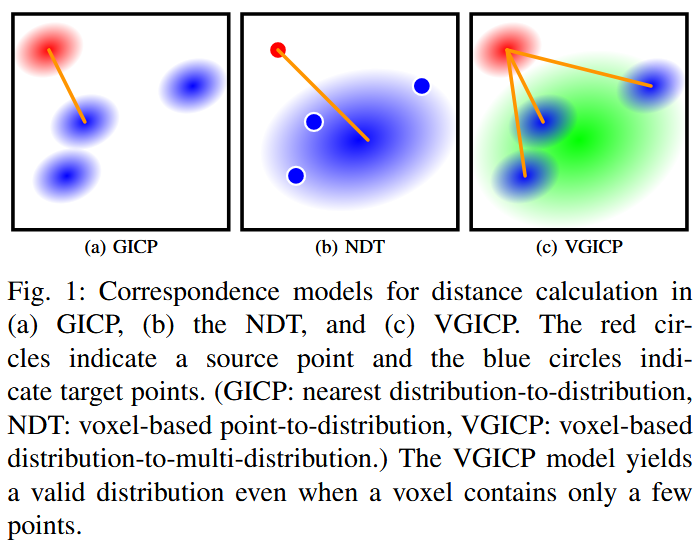
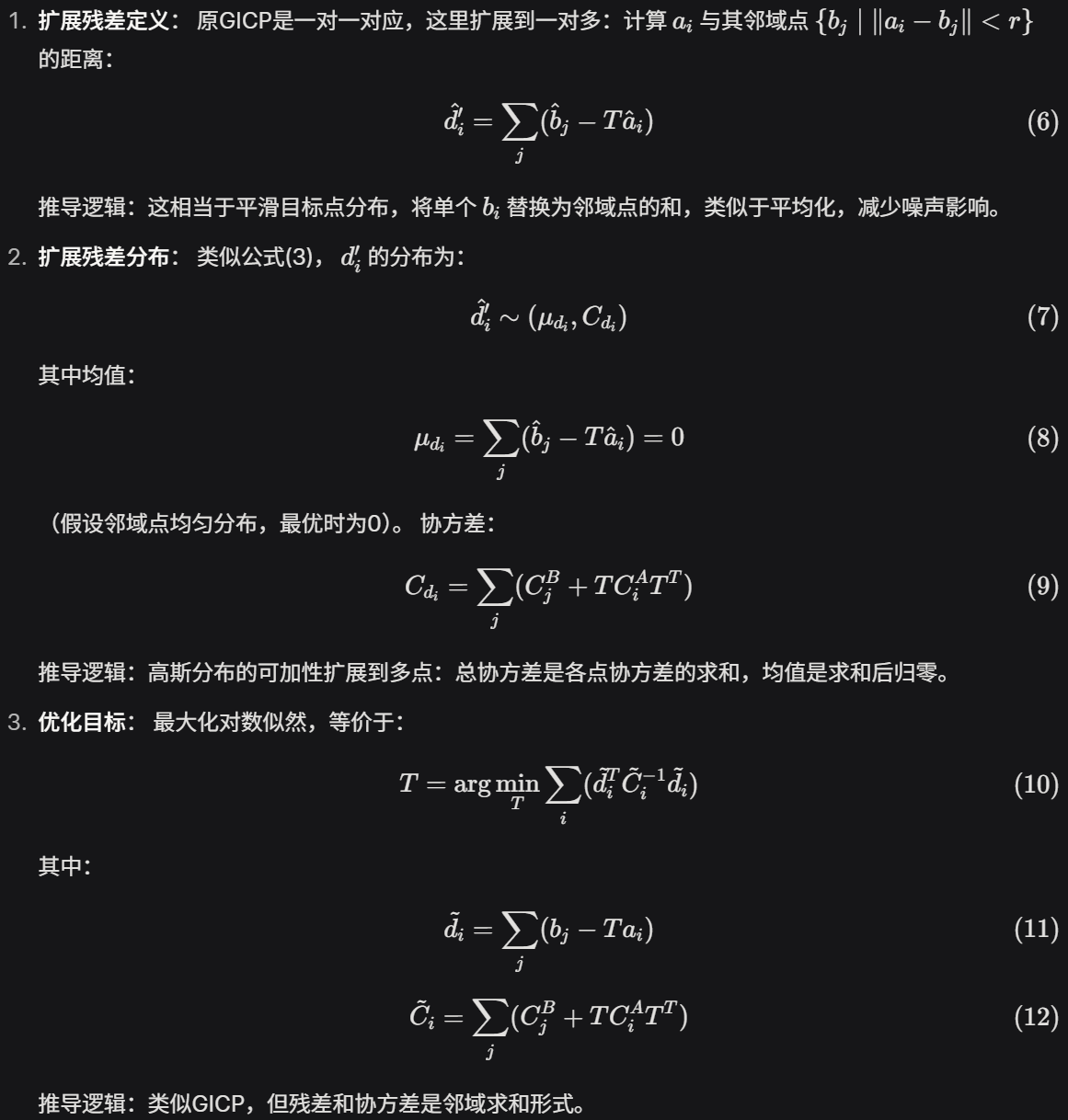
VGICP通过体素化(voxelization)扩展GICP,避免最近邻搜索的瓶颈,同时引入一对多分布对应,以提高对体素分辨率的鲁棒性。核心是平滑目标分布,并使用体素聚合点分布。
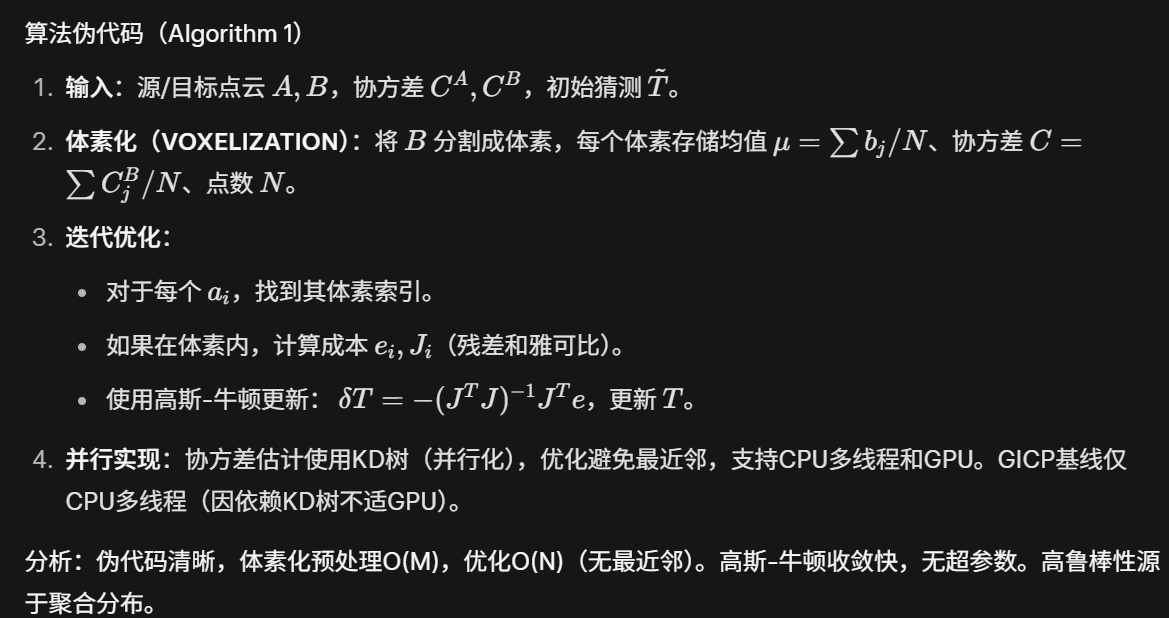
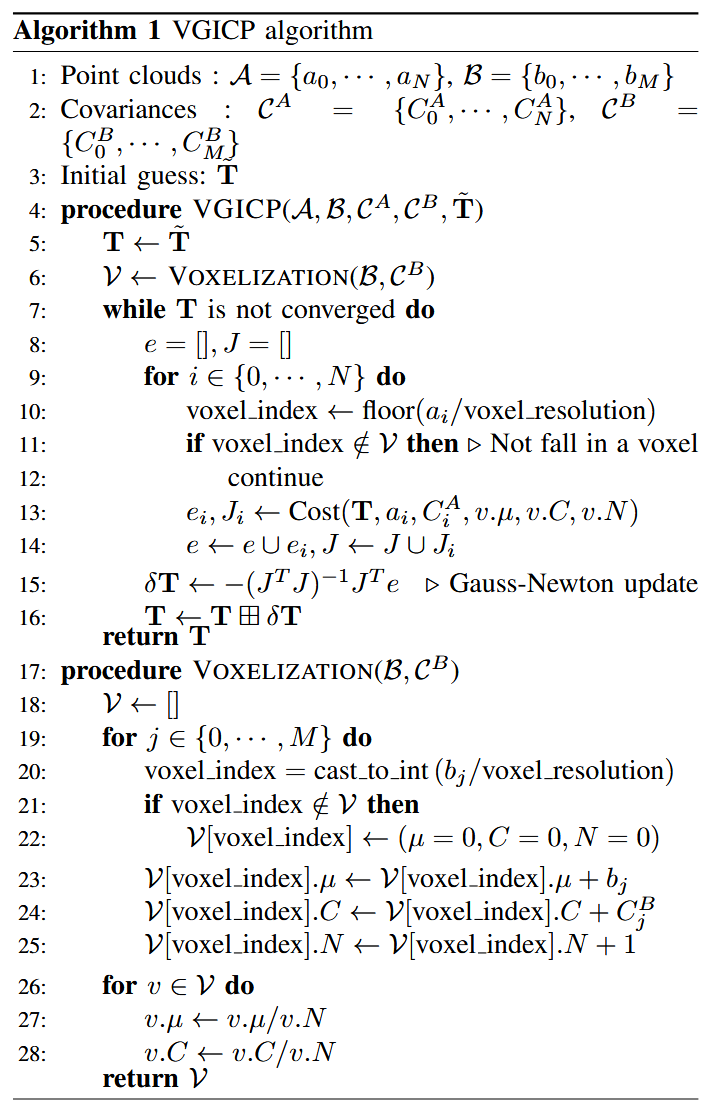
C. Implementation
实验
硬件平台
硬件:Intel Core i9-9900K CPU 和 NVIDIA GeForce RTX 2080 Ti GPU。
数据集
Benchmark
结果分析
- 精度结果:
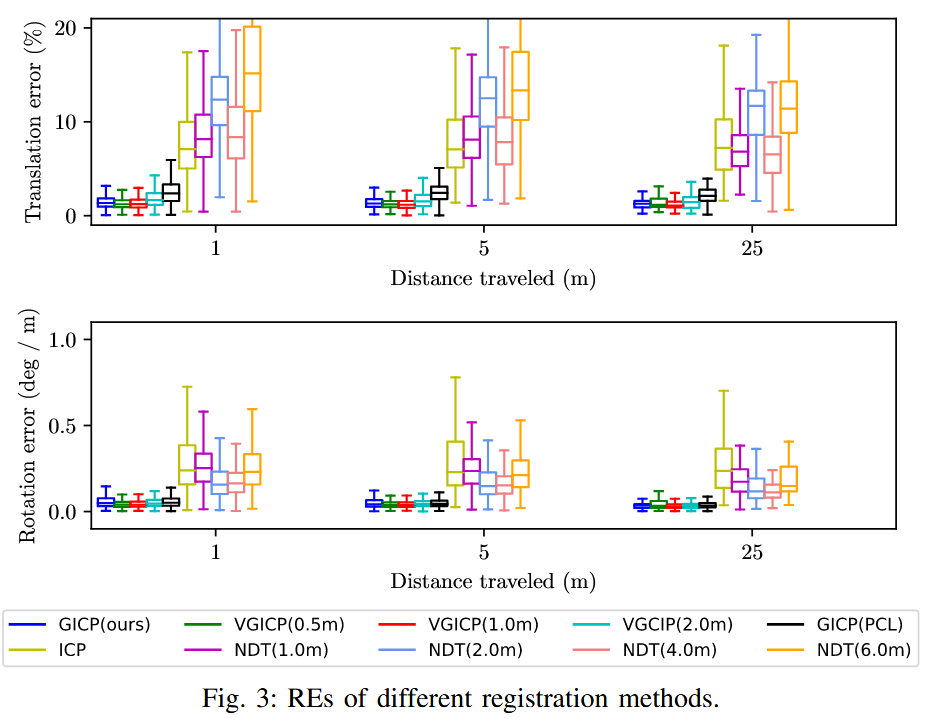
- 图3展示了不同方法的RE(相对误差)。NDT的精度高度依赖体素分辨率:在1m、2m、6m分辨率下精度显著下降,最优为4.0m,但仍无法捕捉环境细部,导致整体精度低于GICP。
- 表格I展示了ATE(绝对轨迹误差)。GICP类算法(包括VGICP)优于经典ICP。论文的GICP和VGICP实现略优于PCL的GICP,可能因使用高斯-牛顿优化器(Gauss-Newton)而非PCL的BFGS优化器(更快、更精确)。
- VGICP的关键优势:对体素分辨率变化鲁棒。即使体素内点数少,也能生成有效分布(前文多点分布聚合方法),导致在宽范围分辨率下性能一致。结果显示VGICP精度与GICP相当,且优于NDT。
- 速度结果:
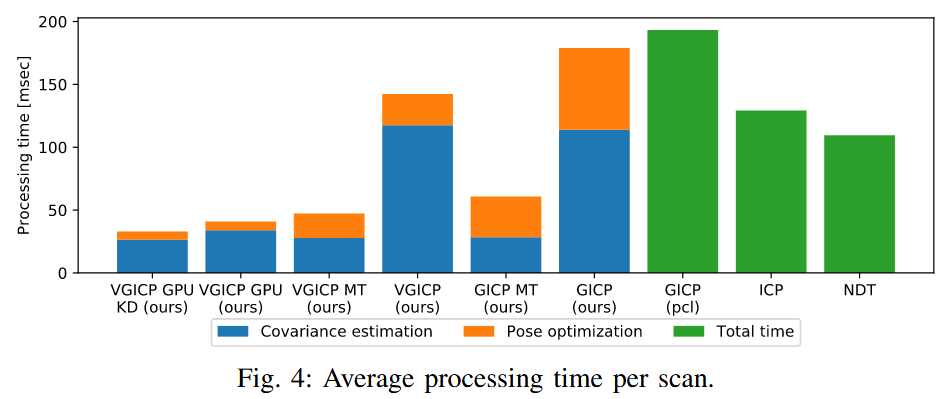
- 图4展示了平均处理时间。
- 单线程:论文GICP(189ms)、VGICP(156ms)快于PCL GICP(201ms)。预处理(协方差估计)相同,但VGICP的位姿优化因体素化而加速。
- 多线程:GICP(68ms)、VGICP(50ms),进一步加速。
- GPU版本VGICP:仅6ms,极快。GPU蛮力最近邻搜索虽在该硬件上慢于CPU KD树,但适合低端CPU+高端GPU(如NVIDIA Jetson)。
- 启示:在目标点云不频繁变化的场景(如关键帧里程计),VGICP效率更高。
- 图4展示了平均处理时间。
评价
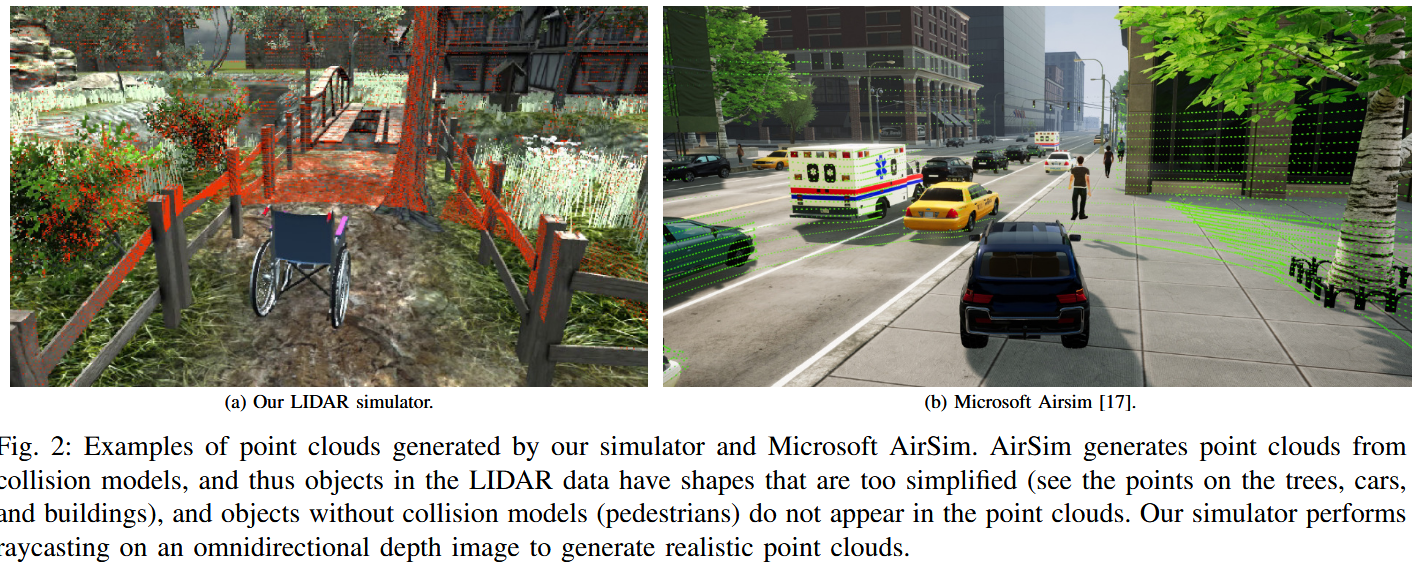
模拟环境实验验证了VGICP的精度(媲美GICP)和鲁棒性(对体素分辨率不敏感),解决了NDT的弱点。速度提升显著,支持实时应用。自定义模拟器的真实性增强了结果的可信度,但模拟环境可能忽略真实噪声(如传感器误差),需结合真实环境验证。
评价
真实环境实验确认了模拟结果:VGICP精度高(媲美GICP)、速度快(GPU下极致)、鲁棒强(分辨率变化小影响)。数据规模(15,000点/帧)和轨迹长度(120m)接近实际应用(如自动驾驶)。真值使用GICP可能略偏向GICP类方法,但结果一致性高。局限:仅评估连续帧配准,未涉及大初始误差或动态环境。
初体验
TODO