C++ opencv RTSP小工具 RTSP流播放、每一帧保存
目录
效果
项目
代码
下载
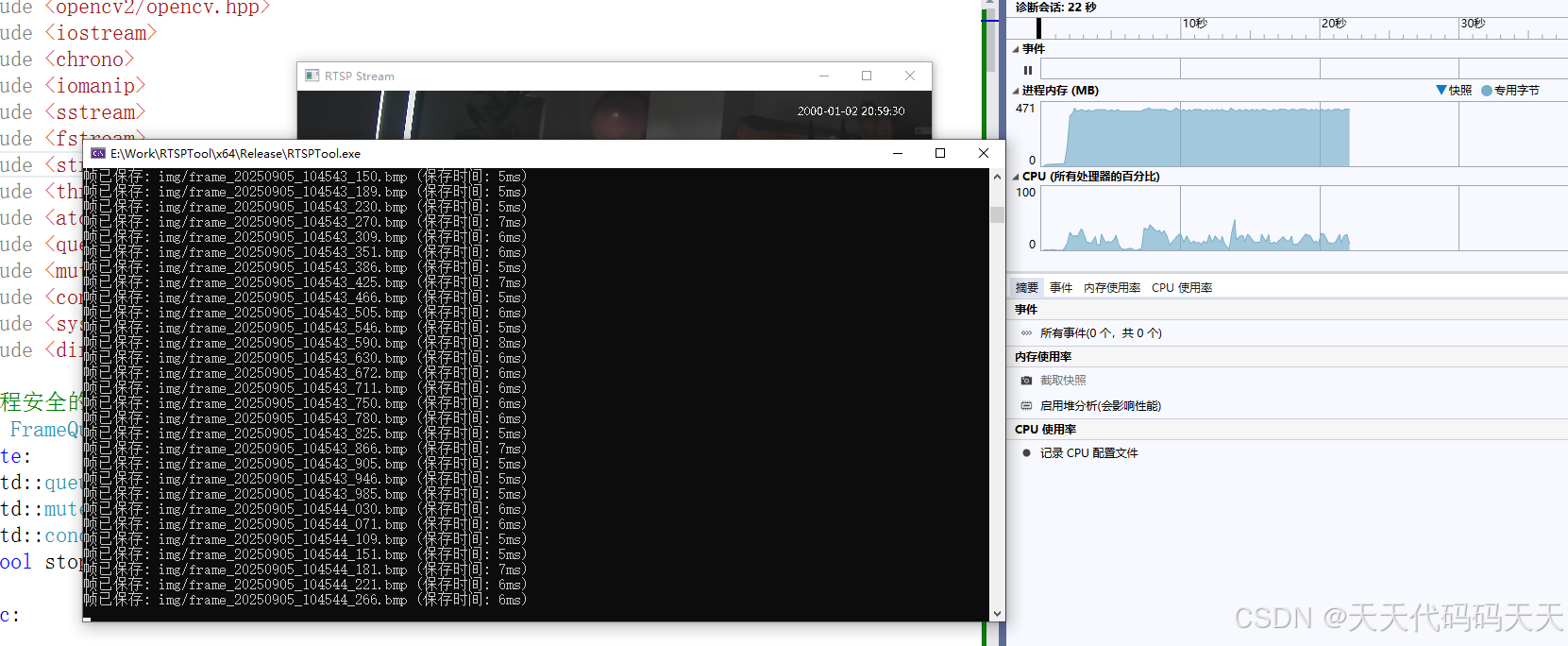
效果
项目
代码
#include <opencv2/opencv.hpp>
#include <iostream>
#include <chrono>
#include <iomanip>
#include <sstream>
#include <fstream>
#include <string>
#include <thread>
#include <atomic>
#include <queue>
#include <mutex>
#include <condition_variable>
#include <sys/stat.h> // 用于文件夹操作 (C++14兼容)
#include <direct.h> // Windows下的mkdir
// 线程安全的帧队列
class FrameQueue {
private:
std::queue<std::pair<cv::Mat, std::string>> queue;
std::mutex mtx;
std::condition_variable cond;
bool stop_flag = false;
public:
void push(const cv::Mat& frame, const std::string& filename) {
std::unique_lock<std::mutex> lock(mtx);
// 深拷贝帧,因为原帧可能会被修改或释放
queue.push(std::make_pair(frame.clone(), filename));
cond.notify_one();
}
bool pop(std::pair<cv::Mat, std::string>& item) {
std::unique_lock<std::mutex> lock(mtx);
cond.wait(lock, [this]() { return !queue.empty() || stop_flag; });
if (stop_flag && queue.empty()) {
return false;
}
item = queue.front();
queue.pop();
return true;
}
void stop() {
std::unique_lock<std::mutex> lock(mtx);
stop_flag = true;
cond.notify_all();
}
bool empty() {
std::unique_lock<std::mutex> lock(mtx);
return queue.empty();
}
};
// 全局变量
FrameQueue frameQueue;
std::atomic<long long> total_save_time{ 0 };
std::atomic<int> saved_frames_count{ 0 };
std::string imgFolder = "img"; // 图片保存文件夹
// 检查文件夹是否存在 (C++14兼容方法)
bool folderExists(const std::string& folderPath) {
struct stat info;
return stat(folderPath.c_str(), &info) == 0 && (info.st_mode & S_IFDIR);
}
// 创建文件夹 (C++14兼容方法)
bool createFolder(const std::string& folderPath) {
#ifdef _WIN32
return _mkdir(folderPath.c_str()) == 0;
#else
return mkdir(folderPath.c_str(), 0733) == 0;
#endif
}
// 检查并创建图片保存文件夹
bool ensureImageFolderExists() {
// 检查文件夹是否存在
if (folderExists(imgFolder)) {
std::cout << "使用图片保存文件夹: " << imgFolder << std::endl;
return true;
}
// 如果不存在,尝试创建文件夹
if (createFolder(imgFolder)) {
std::cout << "创建图片保存文件夹: " << imgFolder << std::endl;
return true;
}
std::cerr << "错误: 无法创建图片保存文件夹" << std::endl;
return false;
}
// 保存图像的线程函数
void saveFrameThread() {
std::vector<int> compression_params;
compression_params.push_back(cv::IMWRITE_JPEG_QUALITY);
compression_params.push_back(100);
while (true) {
std::pair<cv::Mat, std::string> item;
if (!frameQueue.pop(item)) {
break;
}
auto start_time = std::chrono::high_resolution_clock::now();
bool saveResult = cv::imwrite(item.second, item.first);
//bool saveResult = cv::imwrite(item.second, item.first, compression_params);
auto end_time = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);
if (!saveResult) {
std::cerr << "错误: 无法保存帧: " << item.second << std::endl;
}
else {
long long save_time = duration.count();
total_save_time += save_time;
saved_frames_count++;
std::cout << "帧已保存: " << item.second<< " (保存时间: " << save_time << "ms)" << std::endl;
}
}
}
// 保存图像的线程函数
void saveFrameThread2() {
std::vector<int> compression_params;
compression_params.push_back(cv::IMWRITE_JPEG_QUALITY);
compression_params.push_back(100); // 质量
while (true) {
std::pair<cv::Mat, std::string> item;
if (!frameQueue.pop(item)) {
break;
}
auto start_time = std::chrono::high_resolution_clock::now();
// 编码图像
std::vector<uchar> buffer;
auto encode_start = std::chrono::high_resolution_clock::now();
cv::imencode(".jpg", item.first, buffer, compression_params);
auto encode_end = std::chrono::high_resolution_clock::now();
// 写入文件
auto write_start = std::chrono::high_resolution_clock::now();
std::ofstream ofs(item.second, std::ios::binary);
ofs.write(reinterpret_cast<char*>(buffer.data()), buffer.size());
ofs.close();
auto write_end = std::chrono::high_resolution_clock::now();
auto end_time = std::chrono::high_resolution_clock::now();
auto total_duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);
auto encode_duration = std::chrono::duration_cast<std::chrono::milliseconds>(encode_end - encode_start);
auto write_duration = std::chrono::duration_cast<std::chrono::milliseconds>(write_end - write_start);
if (!ofs) {
std::cerr << "错误: 无法保存帧: " << item.second << std::endl;
}
else {
long long total_time = total_duration.count();
long long encode_time = encode_duration.count();
long long write_time = write_duration.count();
total_save_time += total_time;
saved_frames_count++;
std::cout << "帧已保存: " << item.second
<< " (总时间: " << total_time << "ms, 编码: " << encode_time << "ms, 写入: " << write_time << "ms)" << std::endl;
}
}
}
// 显示使用说明
void printUsage(const std::string& programName) {
std::cout << "使用方法: " << programName << " <RTSP_URL>" << std::endl;
std::cout << "示例: " << programName << " rtsp://username:password@192.168.1.100:554/stream" << std::endl;
std::cout << "注意: 如果URL中包含特殊字符(如&),请将整个URL用双引号括起来" << std::endl;
std::cout << std::endl;
std::cout << "控制命令:" << std::endl;
std::cout << " q/Q - 退出程序" << std::endl;
std::cout << " 空格键 - 暂停/继续播放" << std::endl;
std::cout << " s/S - 显示保存统计信息" << std::endl;
std::cout << " c/C - 清零统计信息" << std::endl;
}
int main(int argc, char* argv[]) {
// 检查命令行参数
if (argc != 2) {
std::cerr << "错误: 需要提供RTSP URL作为参数" << std::endl;
printUsage(argv[0]);
return -1;
}
// 从命令行参数获取RTSP URL
std::string rtspUrl = argv[1];
std::cout << "使用RTSP URL: " << rtspUrl << std::endl;
// 检查并创建图片保存文件夹
if (!ensureImageFolderExists()) {
std::cerr << "错误: 无法创建或访问图片保存文件夹,程序将退出" << std::endl;
return -1;
}
// 打开视频流
cv::VideoCapture cap(rtspUrl, cv::CAP_FFMPEG);
if (!cap.isOpened()) {
std::cerr << "错误: 无法打开RTSP流" << std::endl;
return -1;
}
// 获取视频流的基本信息
double fps = cap.get(cv::CAP_PROP_FPS);
int frameWidth = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_WIDTH));
int frameHeight = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_HEIGHT));
std::cout << "RTSP流信息: " << frameWidth << "x" << frameHeight << " at " << fps << " FPS" << std::endl;
// 创建保存线程
std::thread saveThread(saveFrameThread);
// 创建窗口
cv::namedWindow("RTSP Stream", cv::WINDOW_NORMAL);
cv::resizeWindow("RTSP Stream", frameWidth / 4, frameHeight / 4);
// 主循环
cv::Mat frame;
while (true) {
// 读取一帧
if (!cap.read(frame)) {
std::cerr << "错误: 读取帧失败" << std::endl;
break;
}
// 显示帧
cv::imshow("RTSP Stream", frame);
// 获取当前时间(精确到毫秒)
auto now = std::chrono::system_clock::now();
auto now_ms = std::chrono::time_point_cast<std::chrono::milliseconds>(now);
auto epoch = now_ms.time_since_epoch();
auto value = std::chrono::duration_cast<std::chrono::milliseconds>(epoch);
long long milliseconds = value.count();
// 将毫秒时间戳转换为可读格式
std::time_t time_t_now = std::chrono::system_clock::to_time_t(now);
std::tm tm_struct;
localtime_s(&tm_struct, &time_t_now);
std::ostringstream oss;
oss << std::put_time(&tm_struct, "%Y%m%d_%H%M%S_") << std::setfill('0') << std::setw(3) << (milliseconds % 1000);
std::string timestampStr = oss.str();
// 构建保存图像的文件名(包含img文件夹路径)
std::string filename = imgFolder + "/frame_" + timestampStr + ".bmp";
// 将帧和文件名添加到队列(由保存线程处理)
frameQueue.push(frame, filename);
// 处理键盘输入
int key = cv::waitKey(1) & 0xFF;
if (key == 'q' || key == 'Q') {
break;
}
else if (key == ' ') {
while (true) {
int innerKey = cv::waitKey(0) & 0xFF;
if (innerKey == ' ') {
break;
}
else if (innerKey == 'q' || innerKey == 'Q') {
cv::destroyAllWindows();
cap.release();
frameQueue.stop();
saveThread.join();
return 0;
}
}
}
else if (key == 's' || key == 'S') {
// 显示统计信息
if (saved_frames_count > 0) {
double avg_save_time = static_cast<double>(total_save_time) / saved_frames_count;
std::cout << "保存统计: " << saved_frames_count << " 帧, 平均保存时间: "<< avg_save_time << "ms" << std::endl;
}
}
else if (key == 'c' || key == 'C') {
// 清空统计信息
total_save_time = 0;
saved_frames_count = 0;
std::cout << "统计信息已清零" << std::endl;
}
}
// 释放资源
cap.release();
cv::destroyAllWindows();
// 停止保存线程并等待结束
frameQueue.stop();
saveThread.join();
// 显示最终统计信息
if (saved_frames_count > 0) {
double avg_save_time = static_cast<double>(total_save_time) / saved_frames_count;
std::cout << "最终统计: " << saved_frames_count << " 帧已保存, 平均保存时间: "<< avg_save_time << "ms" << std::endl;
}
return 0;
}
#include <opencv2/opencv.hpp>
#include <iostream>
#include <chrono>
#include <iomanip>
#include <sstream>
#include <fstream>
#include <string>
#include <thread>
#include <atomic>
#include <queue>
#include <mutex>
#include <condition_variable>
#include <sys/stat.h> // 用于文件夹操作 (C++14兼容)
#include <direct.h> // Windows下的mkdir// 线程安全的帧队列
class FrameQueue {
private:std::queue<std::pair<cv::Mat, std::string>> queue;std::mutex mtx;std::condition_variable cond;bool stop_flag = false;public:void push(const cv::Mat& frame, const std::string& filename) {std::unique_lock<std::mutex> lock(mtx);// 深拷贝帧,因为原帧可能会被修改或释放queue.push(std::make_pair(frame.clone(), filename));cond.notify_one();}bool pop(std::pair<cv::Mat, std::string>& item) {std::unique_lock<std::mutex> lock(mtx);cond.wait(lock, [this]() { return !queue.empty() || stop_flag; });if (stop_flag && queue.empty()) {return false;}item = queue.front();queue.pop();return true;}void stop() {std::unique_lock<std::mutex> lock(mtx);stop_flag = true;cond.notify_all();}bool empty() {std::unique_lock<std::mutex> lock(mtx);return queue.empty();}
};// 全局变量
FrameQueue frameQueue;
std::atomic<long long> total_save_time{ 0 };
std::atomic<int> saved_frames_count{ 0 };
std::string imgFolder = "img"; // 图片保存文件夹// 检查文件夹是否存在 (C++14兼容方法)
bool folderExists(const std::string& folderPath) {struct stat info;return stat(folderPath.c_str(), &info) == 0 && (info.st_mode & S_IFDIR);
}// 创建文件夹 (C++14兼容方法)
bool createFolder(const std::string& folderPath) {
#ifdef _WIN32return _mkdir(folderPath.c_str()) == 0;
#elsereturn mkdir(folderPath.c_str(), 0733) == 0;
#endif
}// 检查并创建图片保存文件夹
bool ensureImageFolderExists() {// 检查文件夹是否存在if (folderExists(imgFolder)) {std::cout << "使用图片保存文件夹: " << imgFolder << std::endl;return true;}// 如果不存在,尝试创建文件夹if (createFolder(imgFolder)) {std::cout << "创建图片保存文件夹: " << imgFolder << std::endl;return true;}std::cerr << "错误: 无法创建图片保存文件夹" << std::endl;return false;
}// 保存图像的线程函数
void saveFrameThread() {std::vector<int> compression_params;compression_params.push_back(cv::IMWRITE_JPEG_QUALITY);compression_params.push_back(100);while (true) {std::pair<cv::Mat, std::string> item;if (!frameQueue.pop(item)) {break;}auto start_time = std::chrono::high_resolution_clock::now();bool saveResult = cv::imwrite(item.second, item.first);//bool saveResult = cv::imwrite(item.second, item.first, compression_params);auto end_time = std::chrono::high_resolution_clock::now();auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);if (!saveResult) {std::cerr << "错误: 无法保存帧: " << item.second << std::endl;}else {long long save_time = duration.count();total_save_time += save_time;saved_frames_count++;std::cout << "帧已保存: " << item.second<< " (保存时间: " << save_time << "ms)" << std::endl;}}
}// 保存图像的线程函数
void saveFrameThread2() {std::vector<int> compression_params;compression_params.push_back(cv::IMWRITE_JPEG_QUALITY);compression_params.push_back(100); // 质量while (true) {std::pair<cv::Mat, std::string> item;if (!frameQueue.pop(item)) {break;}auto start_time = std::chrono::high_resolution_clock::now();// 编码图像std::vector<uchar> buffer;auto encode_start = std::chrono::high_resolution_clock::now();cv::imencode(".jpg", item.first, buffer, compression_params);auto encode_end = std::chrono::high_resolution_clock::now();// 写入文件auto write_start = std::chrono::high_resolution_clock::now();std::ofstream ofs(item.second, std::ios::binary);ofs.write(reinterpret_cast<char*>(buffer.data()), buffer.size());ofs.close();auto write_end = std::chrono::high_resolution_clock::now();auto end_time = std::chrono::high_resolution_clock::now();auto total_duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);auto encode_duration = std::chrono::duration_cast<std::chrono::milliseconds>(encode_end - encode_start);auto write_duration = std::chrono::duration_cast<std::chrono::milliseconds>(write_end - write_start);if (!ofs) {std::cerr << "错误: 无法保存帧: " << item.second << std::endl;}else {long long total_time = total_duration.count();long long encode_time = encode_duration.count();long long write_time = write_duration.count();total_save_time += total_time;saved_frames_count++;std::cout << "帧已保存: " << item.second<< " (总时间: " << total_time << "ms, 编码: " << encode_time << "ms, 写入: " << write_time << "ms)" << std::endl;}}
}// 显示使用说明
void printUsage(const std::string& programName) {std::cout << "使用方法: " << programName << " <RTSP_URL>" << std::endl;std::cout << "示例: " << programName << " rtsp://username:password@192.168.1.100:554/stream" << std::endl;std::cout << "注意: 如果URL中包含特殊字符(如&),请将整个URL用双引号括起来" << std::endl;std::cout << std::endl;std::cout << "控制命令:" << std::endl;std::cout << " q/Q - 退出程序" << std::endl;std::cout << " 空格键 - 暂停/继续播放" << std::endl;std::cout << " s/S - 显示保存统计信息" << std::endl;std::cout << " c/C - 清零统计信息" << std::endl;
}int main(int argc, char* argv[]) {// 检查命令行参数if (argc != 2) {std::cerr << "错误: 需要提供RTSP URL作为参数" << std::endl;printUsage(argv[0]);return -1;}// 从命令行参数获取RTSP URLstd::string rtspUrl = argv[1];std::cout << "使用RTSP URL: " << rtspUrl << std::endl;// 检查并创建图片保存文件夹if (!ensureImageFolderExists()) {std::cerr << "错误: 无法创建或访问图片保存文件夹,程序将退出" << std::endl;return -1;}// 打开视频流cv::VideoCapture cap(rtspUrl, cv::CAP_FFMPEG);if (!cap.isOpened()) {std::cerr << "错误: 无法打开RTSP流" << std::endl;return -1;}// 获取视频流的基本信息double fps = cap.get(cv::CAP_PROP_FPS);int frameWidth = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_WIDTH));int frameHeight = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_HEIGHT));std::cout << "RTSP流信息: " << frameWidth << "x" << frameHeight << " at " << fps << " FPS" << std::endl;// 创建保存线程std::thread saveThread(saveFrameThread);// 创建窗口cv::namedWindow("RTSP Stream", cv::WINDOW_NORMAL);cv::resizeWindow("RTSP Stream", frameWidth / 4, frameHeight / 4);// 主循环cv::Mat frame;while (true) {// 读取一帧if (!cap.read(frame)) {std::cerr << "错误: 读取帧失败" << std::endl;break;}// 显示帧cv::imshow("RTSP Stream", frame);// 获取当前时间(精确到毫秒)auto now = std::chrono::system_clock::now();auto now_ms = std::chrono::time_point_cast<std::chrono::milliseconds>(now);auto epoch = now_ms.time_since_epoch();auto value = std::chrono::duration_cast<std::chrono::milliseconds>(epoch);long long milliseconds = value.count();// 将毫秒时间戳转换为可读格式std::time_t time_t_now = std::chrono::system_clock::to_time_t(now);std::tm tm_struct;localtime_s(&tm_struct, &time_t_now);std::ostringstream oss;oss << std::put_time(&tm_struct, "%Y%m%d_%H%M%S_") << std::setfill('0') << std::setw(3) << (milliseconds % 1000);std::string timestampStr = oss.str();// 构建保存图像的文件名(包含img文件夹路径)std::string filename = imgFolder + "/frame_" + timestampStr + ".bmp";// 将帧和文件名添加到队列(由保存线程处理)frameQueue.push(frame, filename);// 处理键盘输入int key = cv::waitKey(1) & 0xFF;if (key == 'q' || key == 'Q') {break;}else if (key == ' ') {while (true) {int innerKey = cv::waitKey(0) & 0xFF;if (innerKey == ' ') {break;}else if (innerKey == 'q' || innerKey == 'Q') {cv::destroyAllWindows();cap.release();frameQueue.stop();saveThread.join();return 0;}}}else if (key == 's' || key == 'S') {// 显示统计信息if (saved_frames_count > 0) {double avg_save_time = static_cast<double>(total_save_time) / saved_frames_count;std::cout << "保存统计: " << saved_frames_count << " 帧, 平均保存时间: "<< avg_save_time << "ms" << std::endl;}}else if (key == 'c' || key == 'C') {// 清空统计信息total_save_time = 0;saved_frames_count = 0;std::cout << "统计信息已清零" << std::endl;}}// 释放资源cap.release();cv::destroyAllWindows();// 停止保存线程并等待结束frameQueue.stop();saveThread.join();// 显示最终统计信息if (saved_frames_count > 0) {double avg_save_time = static_cast<double>(total_save_time) / saved_frames_count;std::cout << "最终统计: " << saved_frames_count << " 帧已保存, 平均保存时间: "<< avg_save_time << "ms" << std::endl;}return 0;
}下载
源码下载