
代码实现了一个基于无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)的二维组合导航系统,融合了惯性测量单元(IMU)和全球导航卫星系统(GNSS)的数据。该系统采用8维误差状态模型,能够实时估计载体的位置、速度、姿态以及传感器偏差。
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
文章目录
- 运行结果
- MATLAB源代码
- 程序详解
-
- 概述
- 系统状态模型
- 观测模型
- UKF核心
- 噪声建模
- 仿真场景
- 性能评估指标
- 算法优势
运行结果
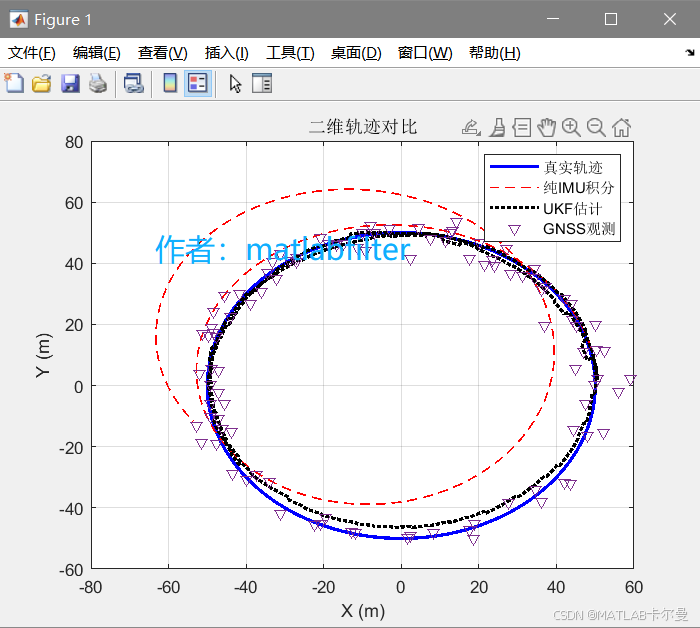
二维轨迹图像对比:
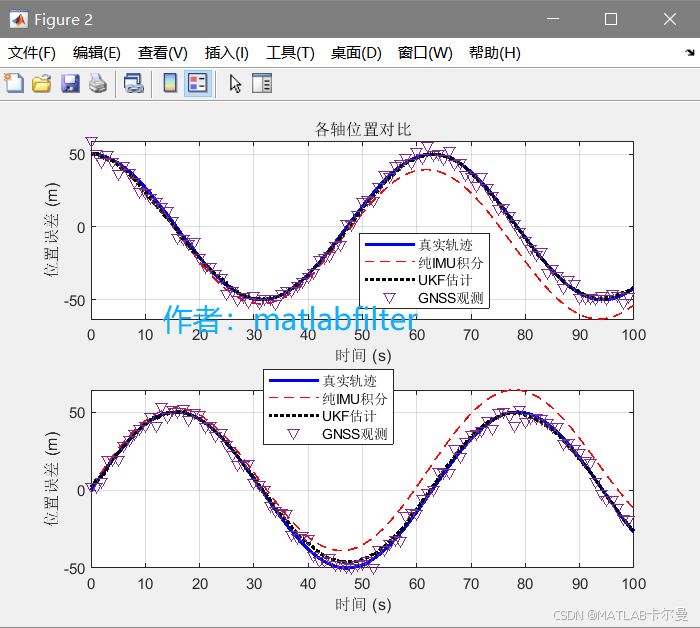
两个维度的位置曲线对比:
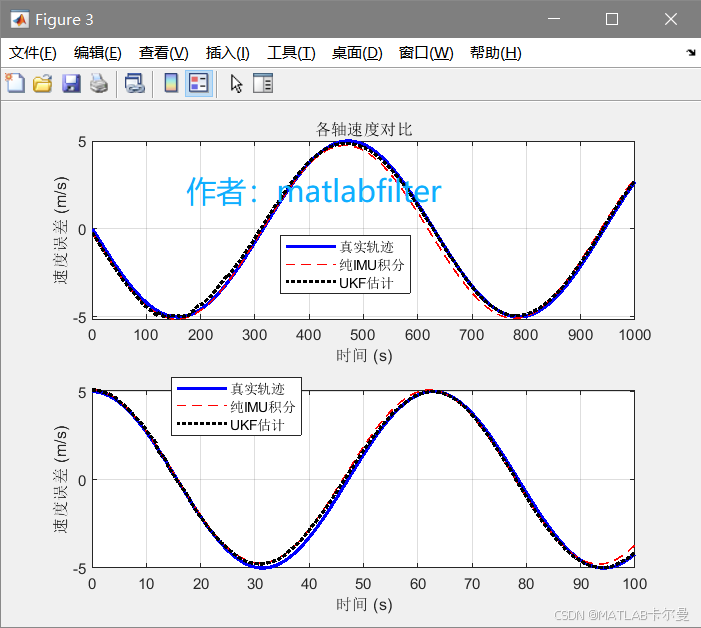
两个维度的速度曲线对比:
误差曲线: