论文解读:基于 77 GHz FMCW 毫米波雷达的舱内占位检测
毫米波 (mm-Wave) 雷达是汽车应用(例如高级驾驶辅助系统 (ADAS))的一种解决方案。本研究探索了商用毫米波雷达技术在车内应用领域的应用。本文提出了一种基于 77 GHz 毫米波雷达的车辆占用检测器框架。本研究采用了德州仪器 (Texas Instruments) 的多输入多输出 (MIMO) 调频连续波 (FMCW) 雷达 (AWR1642)。该系统可以通过测量人体的细微运动来检测座椅上是否有人。为此,系统消除了静态杂波,因此雷达返回的点云包含了人体信息。雷达安装在车顶,以获得最大的座椅视场。本文提出了一种同时利用每个座椅周围点的密度和弥散度来确定座椅占用程度的算法。针对四座和五座车辆,我们给出了高精度的实验结果。
引言
用于检测、识别和统计车辆内乘员数量的电子系统被称为车辆占用检测系统。由于其在交通领域能够有效缓解交通拥堵、节省时间和减少环境污染,其应用日益广泛。交通拥堵问题日益严重,已成为大多数城市的一个严重问题。道路车辆数量的增加导致车速降低、道路堵塞、行程时间延长、浪费宝贵时间,并对经济造成负面影响。政府法规正在推广高乘载车辆 (HOV) 车道,将其作为一项提升道路和城市交通的新战略。HOV 车道将通过鼓励拼车、公共交通和公共交通的使用来缓解交通拥堵。HOV 车道和拥堵收费优惠政策的出台也促进了车辆共享。然而,实施此类政策所需的车辆占用检测通常采用劳动密集型的手动程序 [1]。考虑到环境标准,进入拥堵城市和场所的通道正逐渐受到限制。因此,预计未来几年对车辆占用检测系统的需求将会上升。
即使在最恶劣的环境下,例如恶劣天气条件、强光或黑暗条件下,雷达技术也能识别人员的存在。与其他传感技术不同,毫米波 (mm-Waves) 可以穿透塑料和衣物等材料。因此,传感器可以隐藏在外壳后面或放置在汽车内部或下方,从而实现非接触式和非侵入式。例如,压力传感器无法区分人体和静态物体,而摄像头在明亮或黑暗的光线条件下也无法检测到婴儿。最近,作者提出了一种基于低成本 60 GHz 相干脉冲毫米波雷达的座位占用检测器和呼吸监测装置。然而,由于其探测距离较短(发射功率低,探测范围约为 1 米),因此必须在每个座位前方安装一个雷达传感器 [2]。超声波距离传感器也被提出用于座位占用检测 [3];然而,它们存在与脉冲雷达类似的问题。为了避免来自邻近物体或乘客的反射,每个座位都必须安装一个。此外,超声波传感器可能会受到车内声源的干扰,或者根据频率的不同,可能会被宠物等动物听到 [3]。本研究提出了一种不同的解决方案来克服这些限制。
本文提出了一种工作在77 GHz频段的调频连续波(FMCW)多输入多输出(MIMO)雷达,用于确定载有多名乘客的车辆的占用程度。本文结构如下:引言之后,第二部分回顾了用于检测车内乘员的不同系统。第三部分描述了基于77 GHz毫米波雷达的拟议解决方案。第四部分给出了实验结果和讨论。最后,第五部分给出了结论。
综述
一些研究和公司已尝试设计一种自动化检测方法来克服这一挑战。文献中提出的车辆占用检测方法主要基于视频系统,这些系统对图像[1]、[4]、[5]、[6]、[7]、[8]、[9]、[10]和热像[11]、[12]、[13]、[14]有不同的分类方式。最近,基于视频和计算机工具的商业产品已针对这些应用进行设计并由施乐、Conduent Inc.、Invision AI、Fortran Traffic Systems Limited、Indra 和西门子等供应商销售。然而,由于这些产品并非安装在车内,而是安装在车外,并且由于各种因素,例如车窗贴膜、遮挡、乘员姿势变化、车速、尺寸、形状、成像几何变化以及恶劣天气条件,基于视频的车辆乘客占用检测方法在区分乘客和座椅上放置的物体方面存在一些缺陷,从而降低了检测成功率。与基于光学视频的系统相比,基于热成像的系统成本更高。因此,需要设计替代的、经济高效的车辆占用检测系统来吸引更多客户。
在车辆内部集成检测设备是确定车辆占用程度的另一种选择。另一方面,车载座椅占用检测系统也用于其他应用,因此这些应用可以共享一个系统。例如,安全气囊系统是现代车辆的基本安全元件,它们需要有关可能占用座椅的乘客的存在和类型的信息才能正常工作。意外触发的安全气囊会导致昂贵的维修费用。
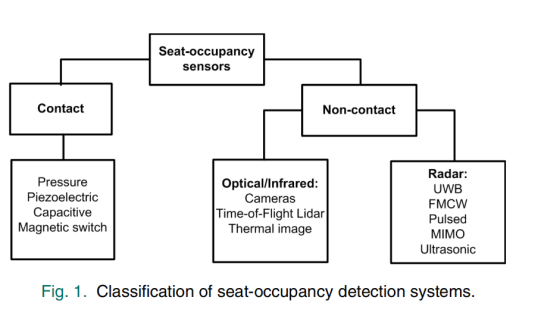
此外,在装有后向式婴儿座椅的座椅上触发安全气囊可能会导致致命伤害[15]。因此,需要安装用于检测座椅占用情况的传感器,以防止在座椅未被用户或后向式婴儿占用时触发安全气囊。安全带是另一个强制性安全系统。座椅占用检测器的另一个应用是用作安全带提醒器。传统的安全带提醒系统与重量传感器配合使用。因此,当座位被行李或购买的物品占用时,就会发出不必要的警报。座位占用监测系统除了满足法规要求(例如根据占用率管理空调系统)外,还可用于提高乘客的舒适度。另一个用途是提醒乘客注意儿童或宠物的存在,防止驾驶员将他们遗忘在车内。文献中提出了各种车载检测座位占用的方法。主要有两种方法:接触式和非接触式。第一种方法是在座椅上安装传感器来检测人员的存在,而第二种方法则依赖于使用电磁波或光学系统检测远处乘员的设备。图1所示的示意图总结了不同的座位占用检测系统。压力传感器是一种广泛使用的接触式检测座位占用的方法[16],[17]。这些传感器的主要局限性在于对振动敏感,并且乘客必须与座椅接触。另一种传感器基于电容式传感技术,由一组嵌入座椅的电极阵列组成[18],[19],[20]。另一方面,这些传感器对干扰以及乘客与座椅之间的距离敏感。
近年来,非接触式座椅占用检测技术日益受到关注。光学传感器,例如摄像头[21]、[22]、[23],可以作为检测系统的可行替代方案,尤其适用于后座应用。最近,在[23]中,研究了一种基于摄像头的方法,通过连接到安全带上的反射物体监测呼吸。此外,基于卡尔曼滤波器,利用光检测和测距 (LiDAR) 传感器测量飞行时间也被提出作为一种座椅占用检测方法[24]。基于摄像头的系统的主要缺点是它们依赖于人脸或形状检测,这使得它们难以在弱光环境下或儿童穿着衣服时使用。与基于摄像头的视觉系统不同,LiDAR 可以提供距离信息。然而,LiDAR 传感器的价格仍然较高(与集成毫米波雷达相比),并且图像处理的计算成本也较高。红外摄像机可以利用人体热量在弱光条件下检测人员,但在车内温度较高(例如夏季)时,可能无法区分人员。此外,红外摄像机比传统摄像机更昂贵。这些视觉系统使用大量的信号处理技术,这大大增加了系统的计算成本和资源。毫米波雷达传感器和车联网 (V2X) 通信 [25] 等新技术的最新发展,有助于开发未来的车辆占用检测系统。由于各种高级驾驶辅助系统 (ADAS) 的大规模市场推广不断增加,以及用于 5G 通信系统的毫米波半导体器件的开发,这些雷达的成本正在下降。用于车辆占用检测的雷达系统正开始受到研究。汽车设计师已经成功地将毫米波传感器集成到车内,用于汽车应用。这些潜在应用之一是能够在考虑各种光照条件和传感器位置的情况下检测车内乘员,而无需考虑运动情况。例如,这可以帮助汽车系统检测车后座无人看管的儿童或乘员的位置以控制温度。
最近,人们研究了不同类型的雷达用于生命体征监测,例如[26]、[27]和[28]、连续波 (CW) 多普勒雷达 [29]、[30]、[31]、调频连续波 (FMCW) 雷达 [32] 或脉冲无线电超宽带 (IR-UWB)。然而,专注于汽车座舱应用的研究相对较少。最近,[33] 和 [34] 分别提出了基于 24 GHz 和 77 GHz FMCW 微波和毫米波雷达的座位占用率检测方法。 [35] 提出了一种基于监测接收的超宽带 (UWB) 信号的座位占用检测方法。[2] 提出了一种基于 60 GHz 相干脉冲雷达的系统,该系统能够检测乘客的存在并测量呼吸频率。这项工作基于时分复用 (TDM) MIMO FMCW 雷达技术,因为它能够同时检测微小运动以及多个目标的距离和角度 [36]。这些特点,加上该技术在汽车领域的成熟度以及汽车制造商的经验,使其与其他雷达技术相比,成为此类应用的理想选择。
系统设计和理论背景
系统概述
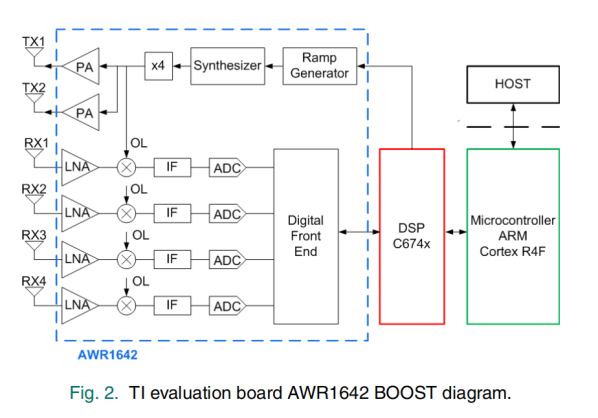
该系统基于德州仪器(TI,美国德克萨斯州达拉斯)的毫米波 AWR1642 雷达芯片组 [37]。它包含一个调频连续波 (FMCW) 雷达,该雷达具有两个发射器和四个接收器,内置锁相环 (PLL) 和模数转换器 (ADC)。本研究使用 TI 的评估板 AWR162 BOOST [38],该评估板还集成了 C674x 数字信号处理器 (DSP) 和 ARM R4F 基带微控制器,用于信号处理、雷达设置以及与外部主控制器的通信。图 2 显示了该评估板的框图。该雷达可在 76-77 GHz 或 77-81 GHz 频段工作,发射功率高达 12.5 dBm。该评估板实现了一个交错虚拟天线阵列 [36],由八个等效天线组成,天线间距为 λ/2。阵列中每个天线在 76-81 GHz 工作频段的最大增益为 9 dBi。
为进行演示,雷达悬挂在汽车天窗上,指向座椅,如图3所示。
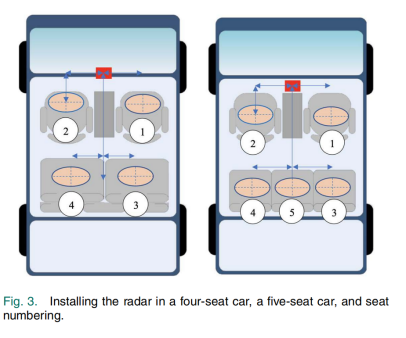
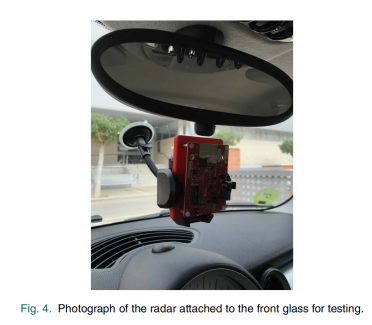
在实际的非演示场景中,它很可能安装在后视镜、仪表盘周围,甚至天花板上。安装时,雷达必须在座椅的直视范围内具有最大的可见度,以避免遮挡信号。此外,该系统还可以应用于手势识别应用,正如最近的研究[39]中提出的。我们将研究两种情况:一辆四座汽车和一辆五座汽车,如图3所示。图4显示了安装在用于本研究测试的车辆前玻璃上的雷达板。
基本测量理论
FMCW 雷达发射由 L 个线性调频信号组成的帧(见图 5)。
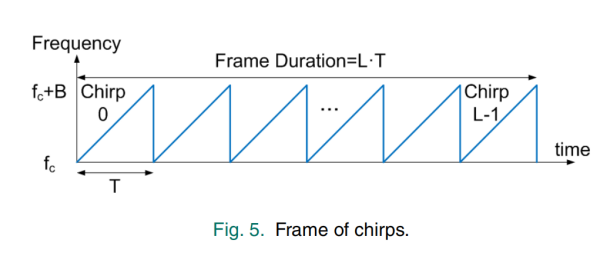
每个线性调频信号的频率随时间变化,从最小值 fmin 到最大值 fmax,呈锯齿状,即 B = fmax − fmin。线性调频信号执行频率的线性扫描,从特定频率值到更高频率值(或反之亦然)。典型的 FMCW 线性调频信号可以写成:

其中,μ = B/T 为线性调频信号的斜率,T 为扫描时间。发射信号由 L 个线性调频信号组成,可表示为:

其中 (t) 是归一化的矩形信号(介于 t = 0 和 t = T 之间)。在四个接收机中,接收信号
和发射信号经过混合和滤波,最终获得差拍信号,该信号以 fs 的速率进行采样和离散化,并使用快速 ADC 进行后处理。对于每个第l个啁啾,第 k 个阵元的接收信号由下式给出 [40]:

对于第 l 个啁啾和第 k 个阵列元件 ylk (t) 获得的差拍信号可以表示为 [40]:
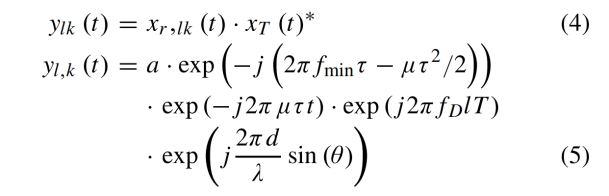
其中,a 为目标振幅,d 为相邻天线单元之间的间距,λ 为载波频率下的波长,τ 为传播延迟,fD 为速度引起的多普勒频移,θ 为到达角 (AoA)。因此,第一项为复振幅;第二项为取决于距离的到达时间项;第三项为多普勒,与运动有关;最后一项为取决于 AoA 的到达方向 (DOA)。样本 ylk [n] = ylk (nTs),其中 n = 0, 1, ..., Ns − 1,保存在一个三维矩阵中。
对于静止目标,传播延迟 τ 与到目标的距离 r 成正比。

然而,对于人来说,呼吸引起的胸部位移会引起周期性的调制,
可以建模如下:

其中,fb 是呼吸频率(通常在 0.1 至 0.3 Hz 之间),rb 是呼吸位移,约为 5 mm [41]。代入式(5)中的 τ,经合理近似后,可得到以下表达式:
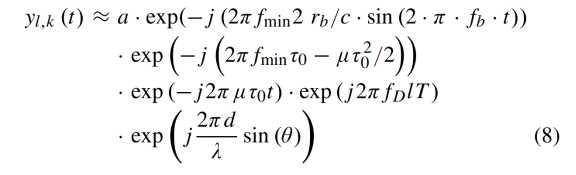
其中τ0 = 2r0/c是与身体距离r0相关的平均传播延迟。由于胸部位移低于距离分辨率(几厘米量级),最后一个方程可近似为以下表达式:

此外,二次项,例如 μ(rb/c · sin(2 · π ·fb · t))2 以及其他涉及呼吸幅度的混合积,也可以在第一次近似时忽略。分析 (8) 式的第一项,可以看出,接收信号的相位受到呼吸引入的慢速变化的调制

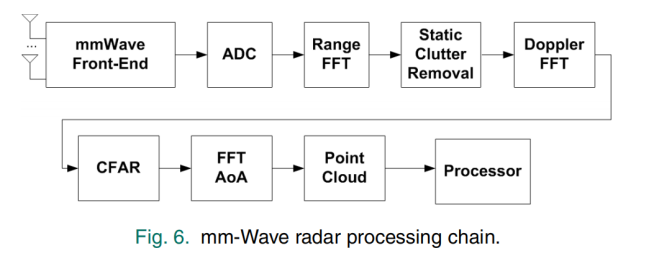
胸部位移与最低频率λmin = 3.89 mm 下的波长相当。因此,预计慢时间中会发生显著的相位变化。这些相位变化不会影响位置或速度的确定,因为它们低于距离和速度(多普勒)分辨率,并且呼吸引起的相位变化在每个啁啾中近似恒定。然而,如果将这些细微变化视为连续雷达采集之间时间的函数,则可以提取有关目标呼吸特征的信息 [42], [43]。特别是,在本文中,它用于区分人与其他物体。图 6 描述了板载 DSP [44] 中实现的处理链。对每个啁啾的样本应用加窗快速傅里叶变换 (FFT)(距离 FFT)来估计距离。距离分辨率取决于区分频谱峰值以分辨目标的能力。因此,距离分辨率由以下公式确定:

为了实现最大距离分辨率,在雷达设置中选择了最大扫描带宽。考虑到3.4 GHz的带宽,根据(11)式可获得4.4 cm的距离分辨率。本研究的主要目标是根据检测到的可能与呼吸相关的微小运动来区分座椅上的人员和无生命物体,或者区分人员和静态杂波。因此,在执行二维快速傅里叶变换(2D-FFT)之前,通过减去输入样本的平均值来实现静态杂波消除算法。对于每个距离单元,每个天线,计算样本的平均值,并从样本中减去该平均值。帧周期选择为10 fps的场景更新率,以便跟踪缓慢的变化。采用表一所列参数,最大不模糊距离为11.1米,最大径向速度为1米/秒,径向速度分辨率为0.0625米/秒。
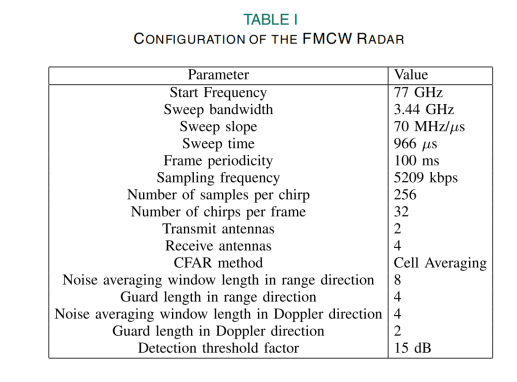
随后,对每个啁啾和天线通道进行另一次快速傅里叶变换 (FFT)(多普勒快速傅里叶变换),从而获得第k个阵元的距离-多普勒图。为了减少杂波,采用恒虚警率 (CFAR) 算法估计阈值。低于该阈值的点被视为杂波,并从距离-多普勒图中删除。目前,文献中已提出了几种 CFAR 算法 [45], [46];然而,本文采用单元平均 (CA CFAR) 算法,因为它简单易用 [47]。该算法通过对邻近单元与目标单元进行平均来估计周围的噪声功率。实验中使用的 CFAR 算法的参数列于表一。本文考虑了被测单元 (CUT) 在距离方向上两侧各有 8 个训练单元和 4 个保卫单元,以及在多普勒方向上两侧各有 4 个训练单元和 2 个保卫单元。阈值由平均功率噪声和阈值因子(或最小信噪比 (SNR))15 dB 获得。然后应用第三次 FFT(AoA FFT)[44], [48]。基于 FFT 的 DOA 检测算法因其复杂度低且易于实现而成为最广泛使用的算法 [49]。角度估计是通过处理由多个阵元组成的阵列接收的信号来实现的。最简单的算法是角度 FFT 算法。如果通过接收阵元在空间维度上进行傅里叶变换(称为角度 FFT),就可以根据物体在方位角上的 AoA (θ) 来区分它们。
在本应用中,角度精度并不重要,因为它用于近似估计乘客所在的区域。因此,本研究采用了角度FFT算法。不过,也可以采用增强型角度算法,例如ESPRIT [50]、MUSIC [49]、[51]或Capon波束形成器[52]。在本研究中,雷达提供的点云数据被用作占用检测算法的输入。整个过程需要三次FFT(距离、速度和角度),如图6所示。雷达板卡内部DSP单元中加载的mm Wave SDK 3.5固件[44]用于计算点云。雷达使用命令行界面(CLI)命令进行配置,测量数据通过USB总线返回。数据以10 fps的速率更新,足以检测呼吸引起的点云变化。
雷达传感器板上对雷达接收的信号进行初步处理,生成点云[44],[48]。该板会根据先前保存的噪声曲线估算出每个点的信噪比 (SNR)。然后在 Raspberry Pi 4 或个人电脑上处理点云。座位占用率算法将在第四部分中描述。
座位占用算法
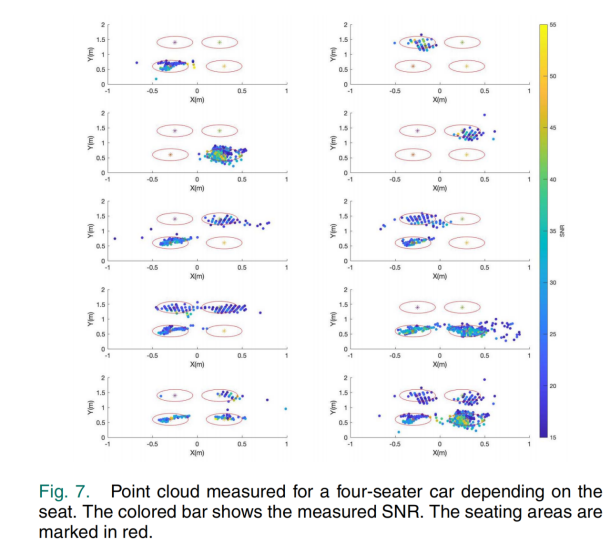
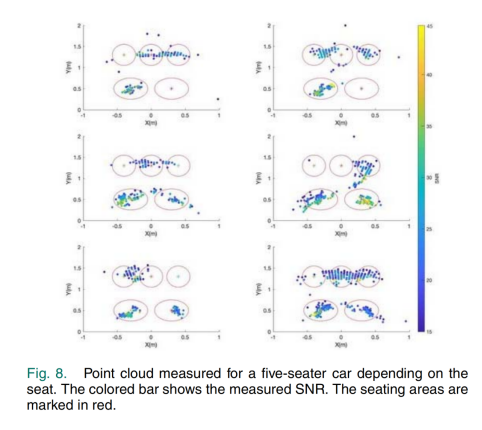
图 7 和图 8 分别显示了四座和五座汽车的点云和 10 秒内每个点的测得信噪比 (SNR)。雷达仅返回信噪比值高于阈值(本例中为 15 dB)的点。因此,低于此阈值的点不会出现在这些图上。空座位对应的区域通常不会显示点。在这种情况下,这些点被视为静态杂波,并使用专门为此设计的算法进行消除。为了观察该算法的效果,图 9 显示了应用或未应用静态杂波算法对一辆空的四座汽车的测量结果。
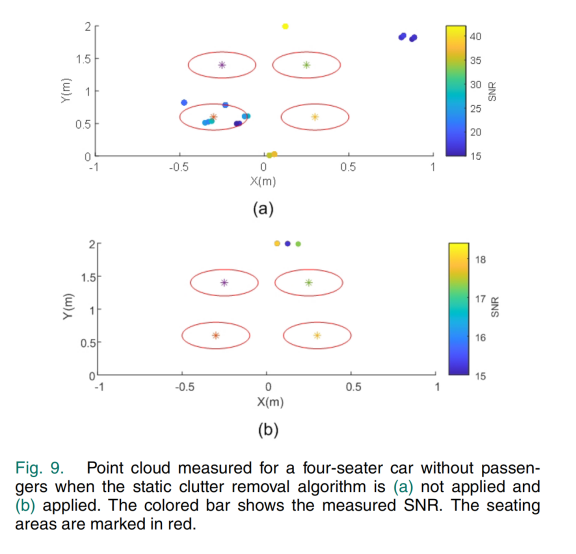
阈值因子决定了所需的误报概率。该值是根据对无乘员车辆的测量结果根据经验选择的。研究发现,对于大多数情况和车辆,15 dB 的水平可以消除感兴趣区域内静止物体的反射[见图 9(b)]。范围大于座位区域的点被移除,因为它们被认为是由车壁或车外物体的反射引起的。基于这些图,我们开发了一种根据某些特征进行分类的算法。首先,我们定义了一些参数来粗略地确定图7和图8中红色所示的座位区域。人体所占据的空间面积近似于一个椭球体的面积。这些椭球体以车辆内部中心的坐标(Xk,Yk)以及水平(Rxk)和垂直(Ryk)的半径为参考点,其中k是座位的索引,k = 1,...,Nseats。这些参数是算法的输入,并且可能因车辆而异。但是,它们可以根据车辆模型从表格中获取,也可以由用户手动指定。例如,表 II 提供了定义两辆四座和五座汽车座位区域的数值。
该算法考虑了一段时间 (Ta) 内保存的点云。计算出每个点的区域后,它们的坐标将保存在向量 Xk 和 Yk 中。如果点 (xi, yi) 属于椭球体,则它位于区域 k 中。

其中,XCk 和 YCk 分别为区域 k 中心的坐标,Rxk 和 Ryk 分别为椭圆体在 x 和 y 方向上的半轴。那么,点云中属于特定区域的点 Nk 的数量,就是向量 Xk 或 Yk 的长度。
就座者的移动会导致每个座位上点的分散。每个区域中点的标准差可以衡量这种分散性。

其中 E() 表示均值算子,Xki 和 Yki 分别是向量 Xk 或 Yk 的分量。分类函数定义如下:

该归一化函数对应于每个区域中点的标准差(σk)乘以该区域中点的密度(Nk/N)。该函数包含点的比例,以避免座位空置时出现误检。空置座位的特征是雷达读取的点数量较少,有时由于残留杂波而分散。每个区域都有一个阈值THk。如果fk > THk,则认为该座位已被占用。座位状态(0或1)保存在向量sok中。

较低的阈值THk会增加误报概率。该阈值是通过实验获得的。由于存在一定的遮挡,前排和后排座椅的阈值会有所不同;因此,观察到后排区域的点数少于前排区域。阈值是固定的,是根据从多组训练测量中获得的函数fk的典型值得出的。为此,我们考虑了不同志愿者占用不同座位数的各种场景,计算了空座位fk函数的平均值和标准差。然后将阈值确定为平均值减去三倍标准差。所得值列于表II。我们发现,在大多数情况下,即使车辆不同,也可以使用相同的值。训练测量值已通过独立测量进行了统计验证,混淆矩阵的结果将在第五部分中展示。
最后,对座位占用率向量进行平均,以消除与乘客移动(例如,上下车时)相关的误差。使用移动平均滤波器(例如,对最后 M = 3 个样本进行平均),并将结果与阈值(m = 0.5)进行比较。滤波后的座位占用率sok 可由以下公式获得:
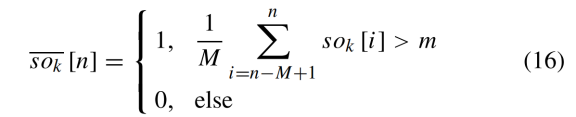
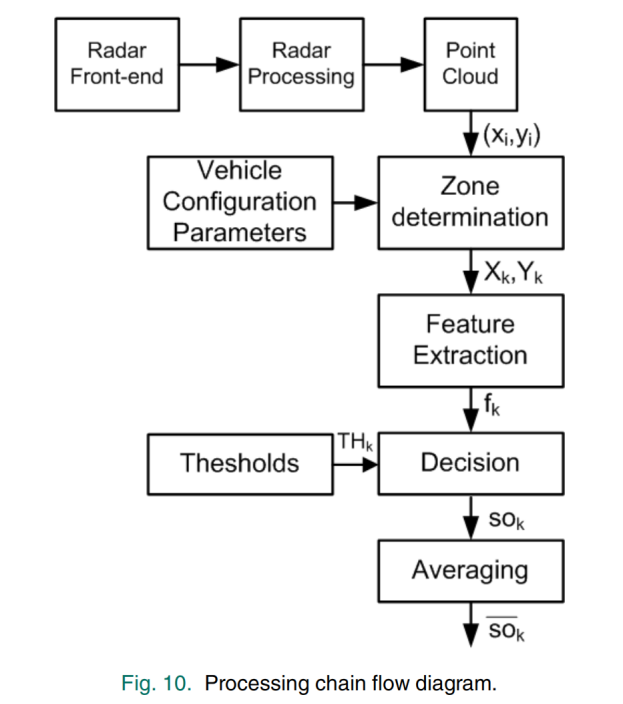
其中 sok 是第 k 个座位的占用率。图 10 展示了该算法的流程图。该算法已在 MATLAB 和 Python 中实现。Python 允许在包括 Raspberry Pi 平台在内的不同平台上运行该算法。由于该算法不需要管理长向量或复杂函数,因此计算成本和内存容量较低。
分类函数的评估仅需几毫秒,明显低于收集具有足够点数的可靠点云所需的采集时间。因此,该算法返回座位占用率的速率取决于采集时间参数。对于商用产品,该算法可以轻松地在其他嵌入式设备上实现,甚至可以在雷达内置的微控制器中实现。
结果
不同情况下的占用检测及算法参数的影响
首先,测试了采集雷达算法,以区分可能占用座位的人员和物体。图 11 显示了在驾驶员乘坐的汽车中测量的点云,侧座中有一个包。包内装有一台笔记本电脑,使其具有高反射率,从而提高了雷达收集回波的水平,并考虑了最坏的情况。可以看出,在放置包的座位上几乎没有任何点。这是因为包保持静止,信号被静态杂波抑制算法消除了。为了证实这一事实,在仅使用静态杂波算法的车内进行了测量。
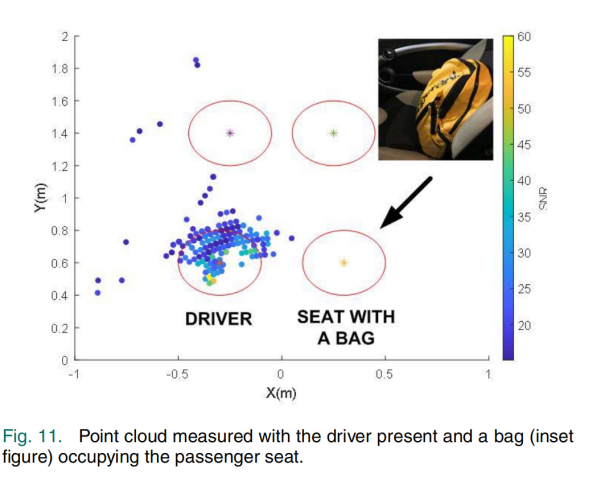
结果如图 12 所示。由于金属箱和其他金属物体的存在,测量到一个静止的强点,但杂波消除算法将其消除。该图证实了 CFAR 算法中检测阈值的选择正确。由于胸部的周期性运动,呼吸会产生低频微多普勒。因此,可以使用多普勒雷达[30]、[31]、调频连续波雷达[32]或时域超宽带[26]和毫米波雷达[2]来测量生命体征。然而,测量呼吸频率需要先进的信号处理算法,如果目标仅仅是检测人员是否在场(正如本文所提出的),则无需使用这种算法。
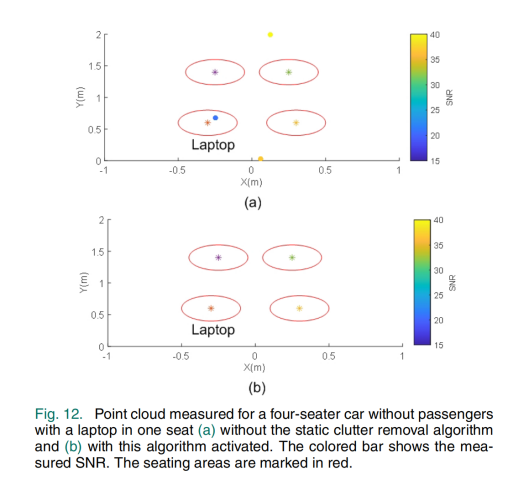
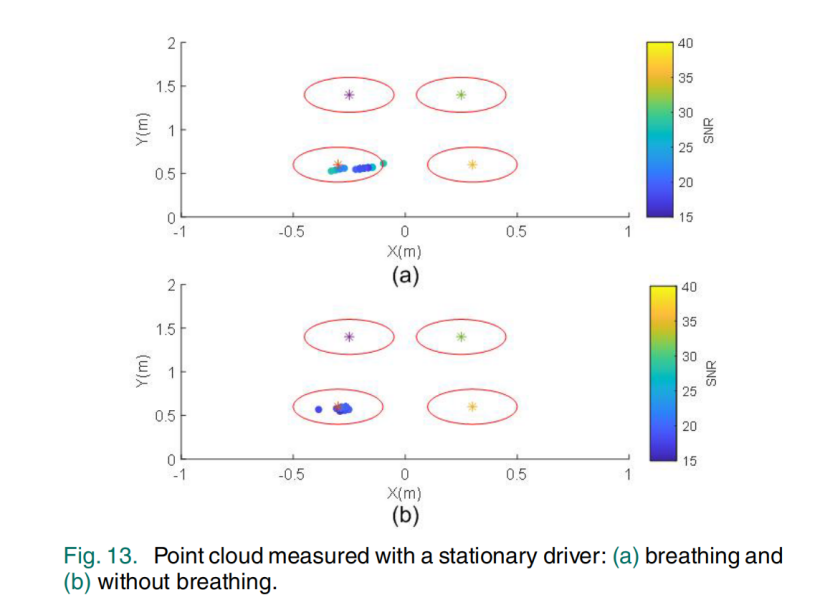
图 13 比较了两种场景下的点云:驾驶员在采集期间正常呼吸或屏住呼吸。在这两种情况下,人员都保持静止。可以观察到,由于胸部运动,点云的弥散度增加,而平稳杂波去除算法无法完全滤除胸部运动。
进行了另一项测试,结果表明车辆运动不会显著影响检测。图 14 展示了所得结果;可以观察到,相对于静态情况(即图11所示的情况),点云几乎没有变化。
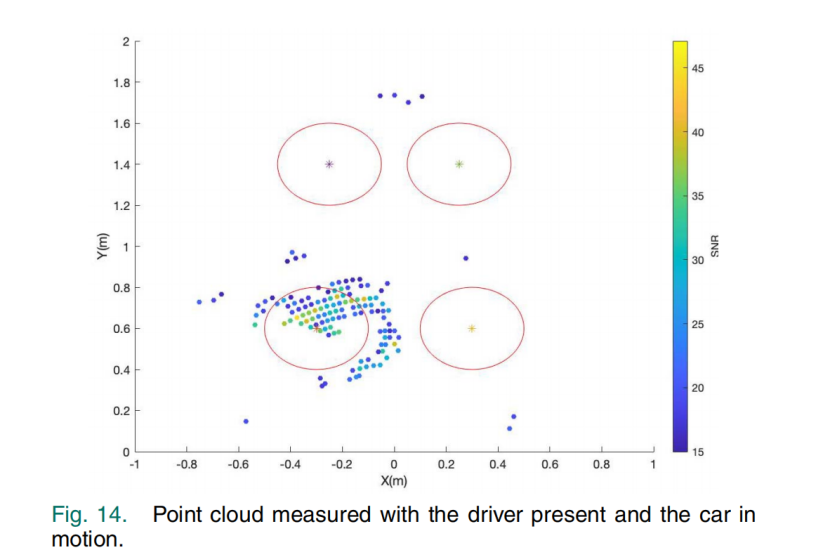
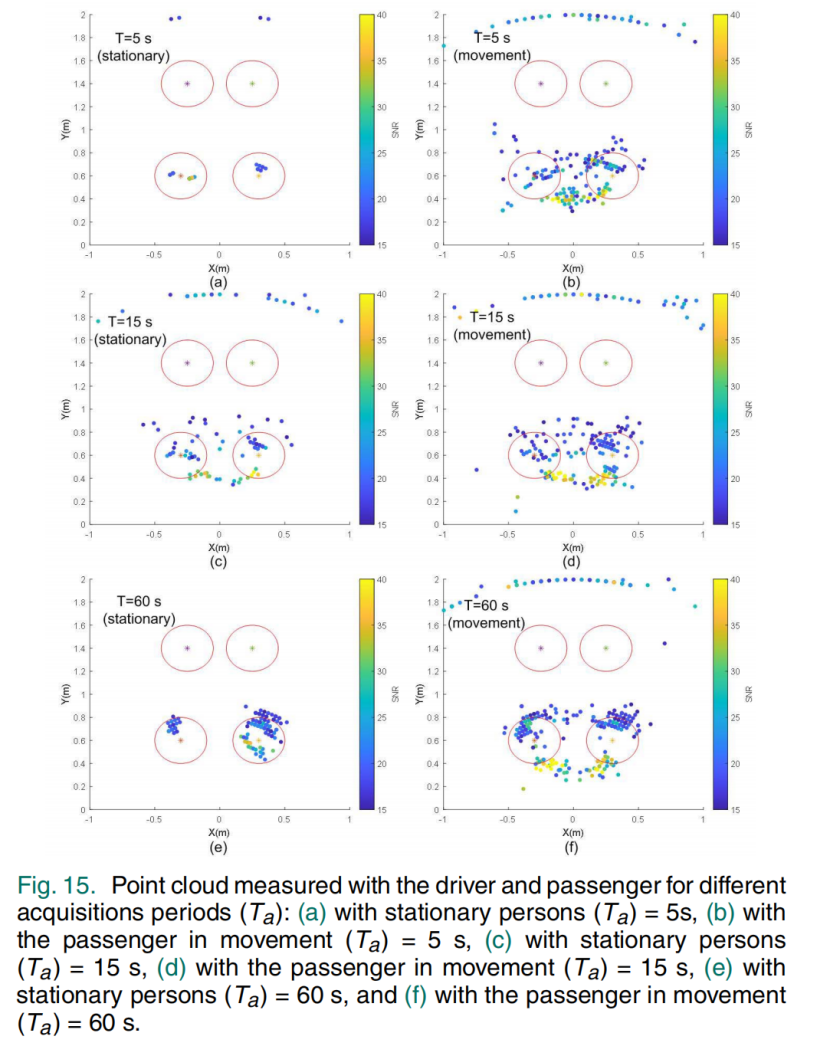
图15显示了采集周期Ta和乘客移动对点云的影响。随着采集周期的增加,点云总数N和每个区域中的点数Nk增加。由于乘客看似静止,但不可避免地会移动,因此弥散度也会增加。因此,在左图中,点云仍然位于座椅区域内。然而,在右图中,乘客向驾驶员做出手势来显示这些影响。可以观察到,座椅区域外的某些点与此类移动以及车厢内反射产生的远处点相对应。移动的影响使弥散度σk增大。然而,移动不会增加与空座位(本例中为后排座椅)相关的点。较长的采集时间通常可以减少与随机乘客移动相关的误报,但另一方面,占用率的更新速度会更慢。10-15秒的数值代表了一种妥协的情况。
分类器性能
为了验证从训练样本中获得的阈值的选择,我们对多名志愿者进行了测量。不同的人随机坐在车内的任意座位上,手动记录已占用座位的位置,并与分类算法给出的预测值进行比较。图16和图17分别显示了四座和五座车辆的乘员人数混淆矩阵。
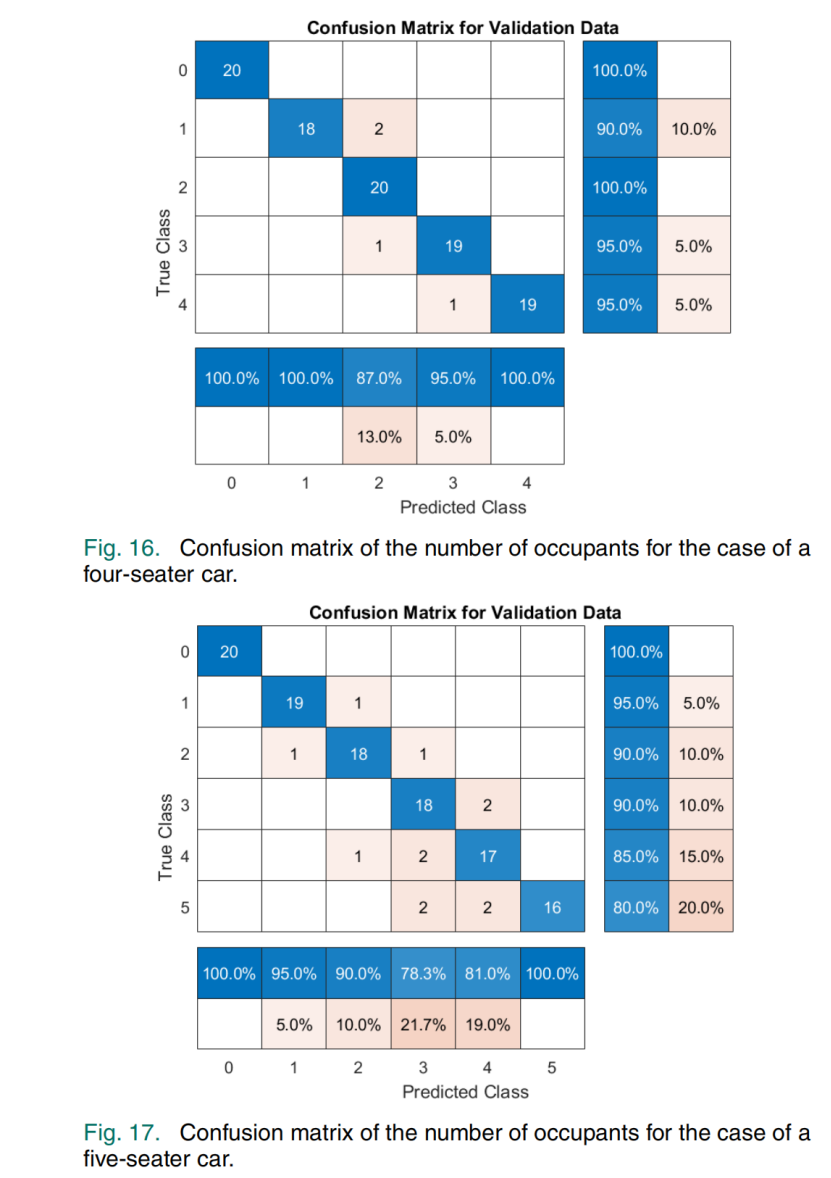
混淆矩阵图中,行表示预测类别(输出类别),列表示真实类别(目标类别)。在这些图中,类别是车内乘员人数。行汇总显示了每个真实类别中正确和错误分类的观测值的百分比。同样,列汇总显示了每个预测类别中正确和错误分类的观测值的百分比。四座和五座车辆的准确率分别为96%和90%。五座车获得的较低值是由于后排座椅之间的距离小于四座车,因此区分后排座椅更加困难。
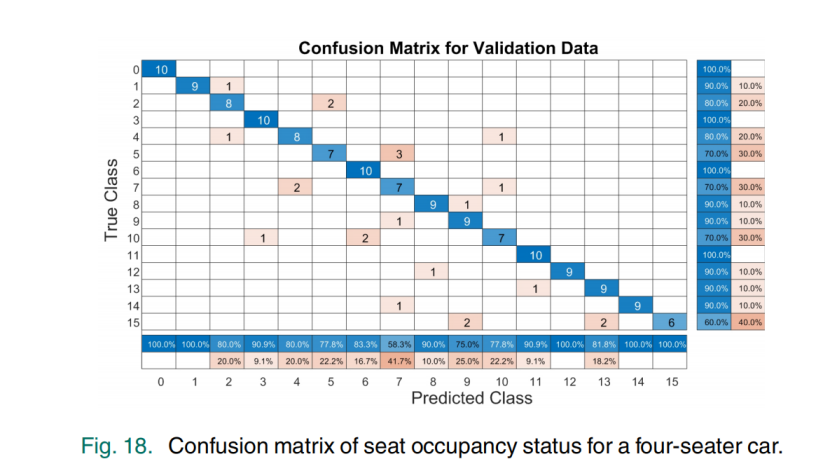
为了研究预测正确座位的误差,图18展示了四座车中每个座位状态的混淆矩阵。类别采用二进制编码(0001表示1号座位有人,1111表示所有座位都有人)。可以看出,大多数误差发生在后排座椅上,因为后排座椅的位置不像前排座椅那样清晰。即便如此,获得的误差也是可以接受的(准确率为86.125%),尤其是在占用率可以随时间平均的情况下,只要乘客不进出车辆,占用率就不会变化。
占用探测器的动态性能
所提算法计算量低,因此可以实时实现,并允许动态更新座位占用情况。图 19 和图 20 展示了四座车厢中每个座位的占用情况检测示例(0 表示空闲,1 表示占用),该检测结果与时间和乘客进出车辆的时间变化有关。图 19 描述了每个时间间隔(状态)中被占用的座位,这些时间间隔用圆圈圈出的数字表示。
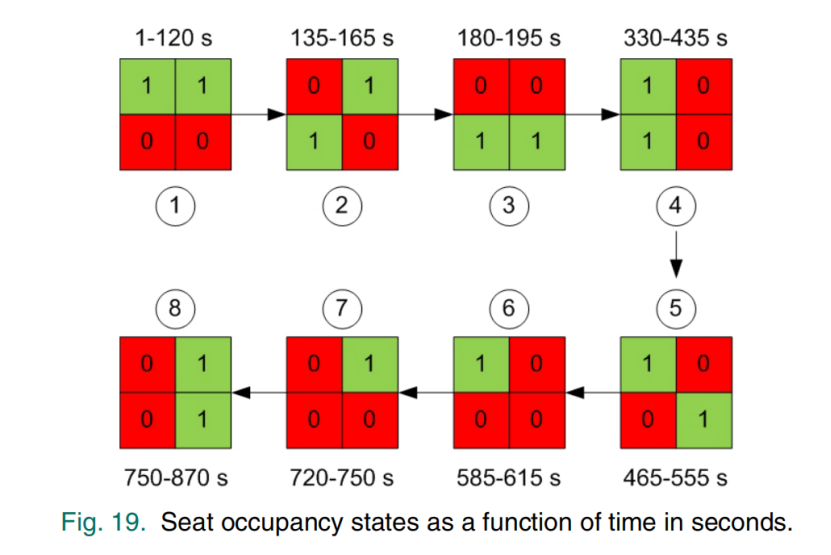
图 20 展示了图 19 中描述的每个时间间隔的占用情况检测结果与时间的关系。可以观察到一些孤立的错误,用蓝色圆圈标记,对应于乘客进出车辆(图 19 中表示的转换)。
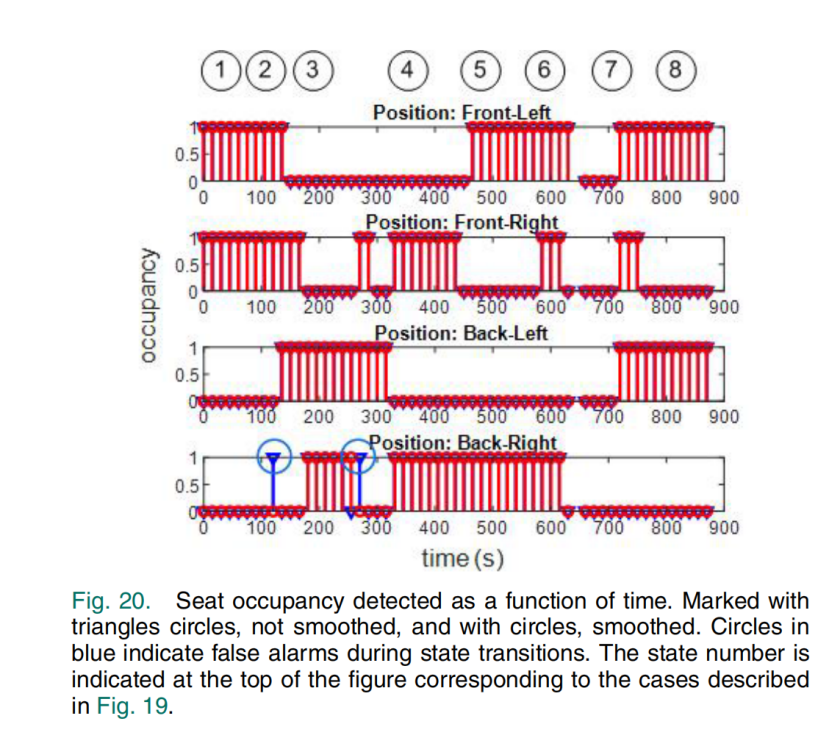
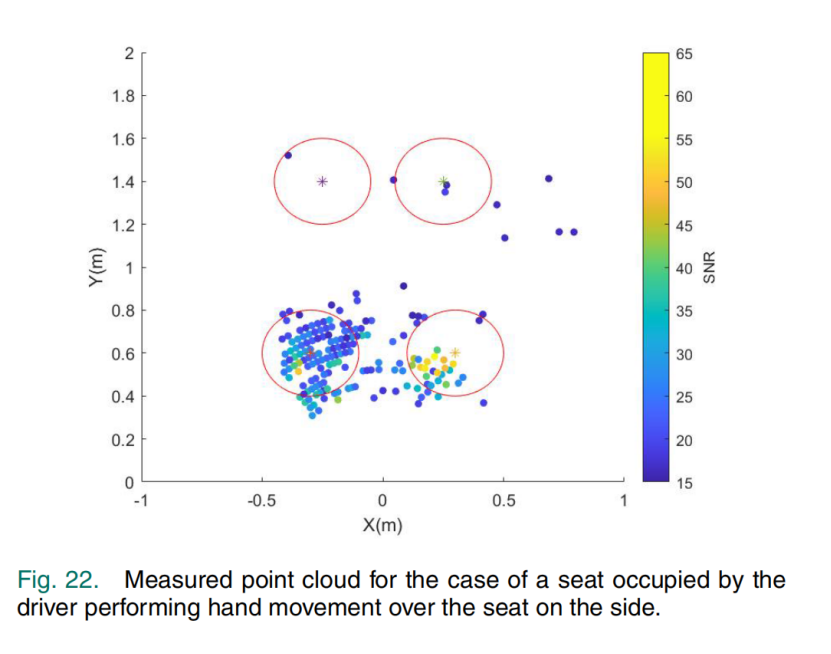
然而,该算法在位置保持稳定时检测座位占用情况。可以使用 (16) 中提供的移动平均滤波器去除这些与转换相关的错误点。为了研究乘客运动的影响,我们进行了一些实验。图21显示了以15秒为周期更新的座位占用情况。在这种情况下,驾驶员在旁边的空座位上做了手势。
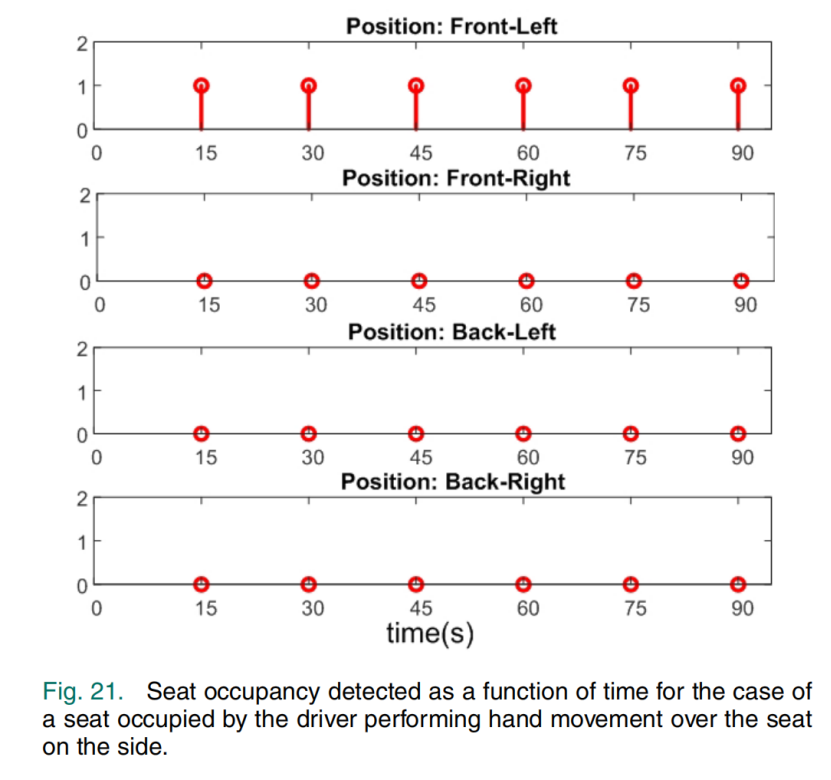
图22中观察到的点云是在手经过的座位区域进行的测量。然而,由于点的密度相对较小,该算法无法检测到空座位的占用情况。
相反,图23显示了驾驶员突然移动并侵入相邻座位区域的情况。从中可以看出,当侧座发生侵入时,算法是如何检测到侧座占用的。
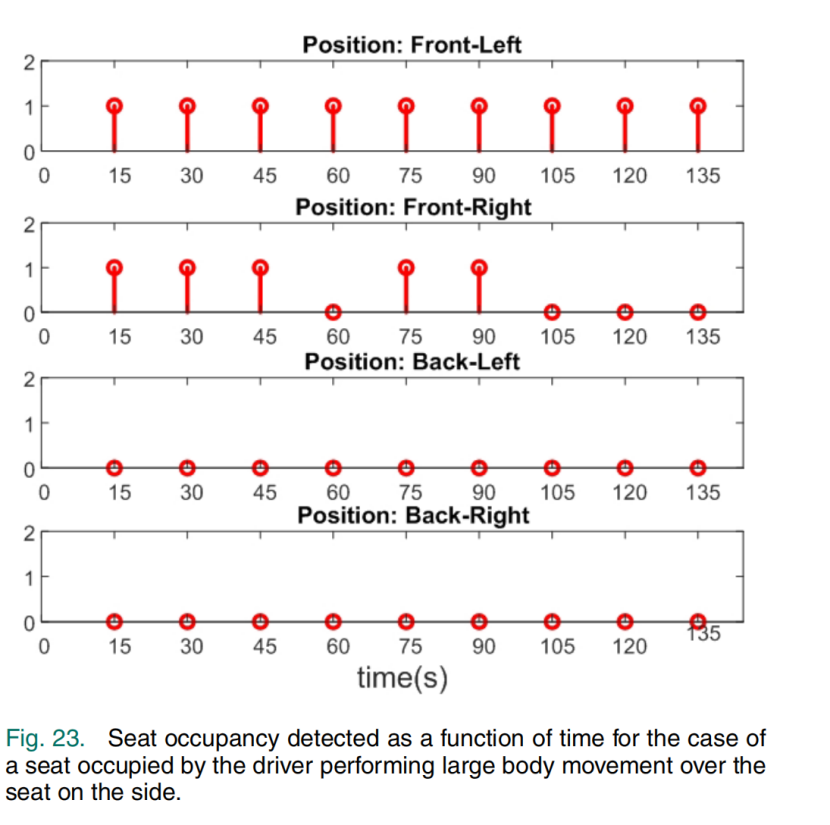
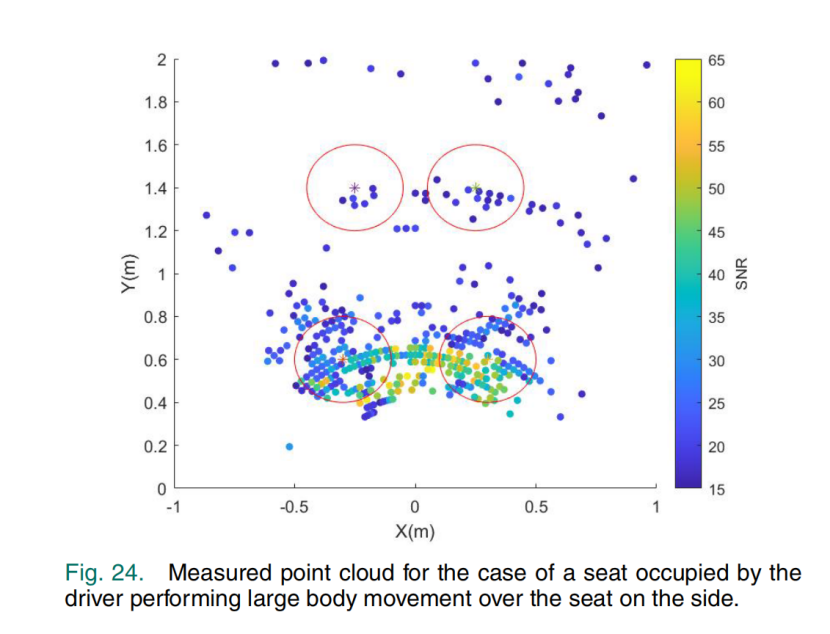
图24显示了由侧座上身体移动引起的测量点云。然而,在没有移动的情况下,该算法再次检测到了空座位。因此,所提出的技术在存在相关乘客运动时会产生误报,但一旦这些运动停止,就会恢复到稳定状态。这些随机误报如果发生在车门关闭时,则可以被检测到,因为此时总乘员人数应随时间保持不变,因此可以将其视为异常值。这些情况可以通过结合座椅上的压力传感器(例如安全气囊传感器)来确定,这些传感器会指示座椅上没有物体。
结论和未来工作
本文研究了一种基于 77 GHz MIMOFMCW 毫米波雷达的车辆占用检测系统。该雷达悬挂在车辆顶棚上,但也可以安装在其他能够看到乘客的位置。本文提出了一种根据雷达读取的测量点云来确定座位占用情况的算法。本文采用静态杂波消除算法,仅考虑与身体细微运动相关的点。因此,该系统能够检测乘客并将其与可能占用座位的其他物体区分开来。本文还采用了一种分类方法,该方法基于一个函数,该函数考虑了点云在座位所在区域周围的分散性以及点云的点密度。本文提出的算法只需要很少的参数,这些参数可以通过训练测量进行调整。据观察,这些值通常适用于不同类型的车辆。因此,无需使用需要训练程序的复杂学习工具。这些参数均已手动调整。然而,返回点的数量以及占用座位标准差的不同特征,在未来基于机器学习技术的高级分类器研究中可以得到充分的利用。虽然其在嵌入式系统中的实现不如所提出的技术那么简单,但其性能还有提升空间,并且其结果可以推广到其他类型的车辆或场景。针对四座和五座汽车的实验结果已得到展示,在确定乘客人数和占用座位位置方面均实现了高精度。这项研究为将所提出的占用检测器与未来的车辆通信系统相结合,例如应用于高乘员(HOV)车道,开辟了新的前景。