三维重建——基础理论(四):三维重建基础与极几何原理(三维重建基础、单视图回忆、双目视觉、极几何、本质矩阵与基础矩阵、基础矩阵估计)
文章目录
- 四、 三维重建基础与极几何
- 1. 三维重建基础
- 1.1 单视图回忆
- 1.2.双目视觉
- 2. 极几何
- 3. 本质矩阵与基础矩阵
- 4. 基础矩阵估计
- 视频教程
- 三维重建基础理论 全部教程
四、 三维重建基础与极几何
1. 三维重建基础
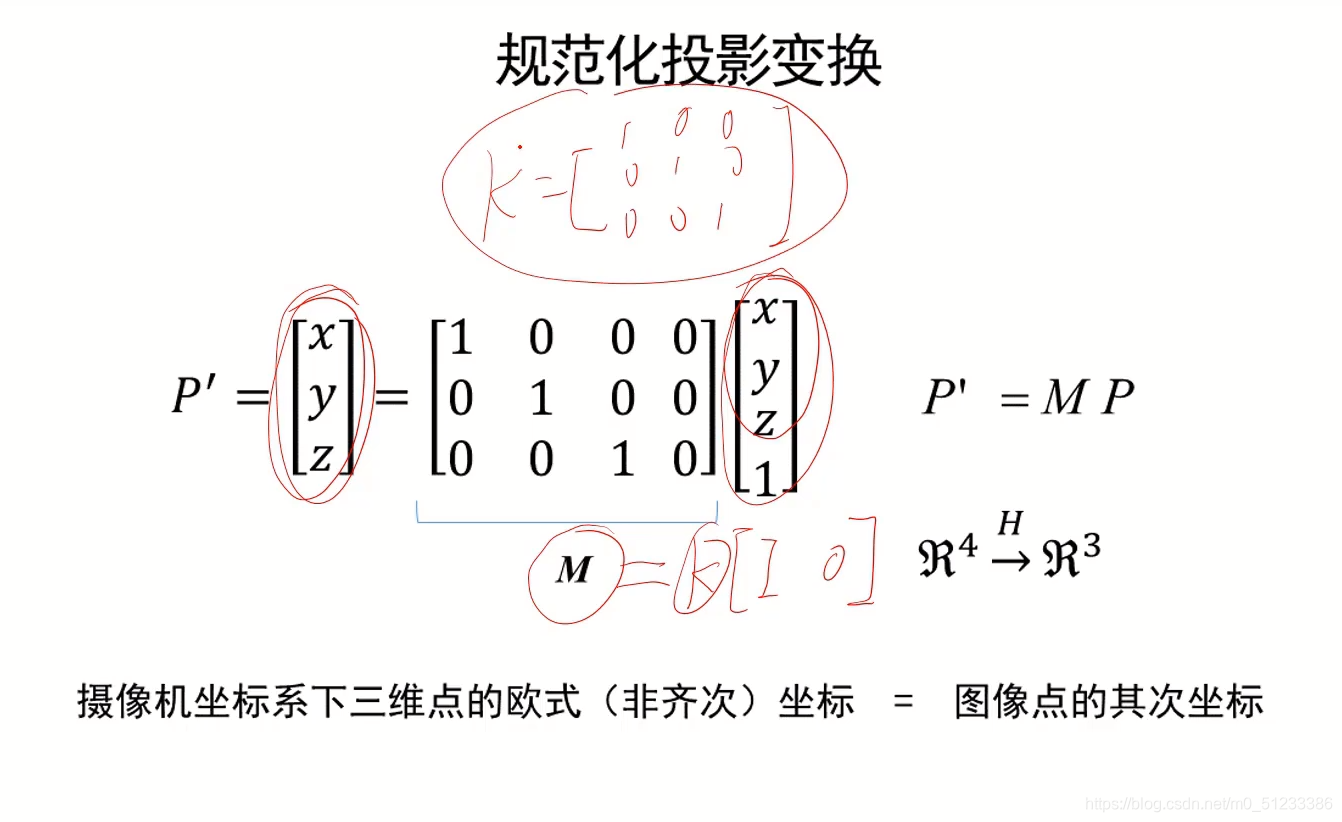
1.1 单视图回忆
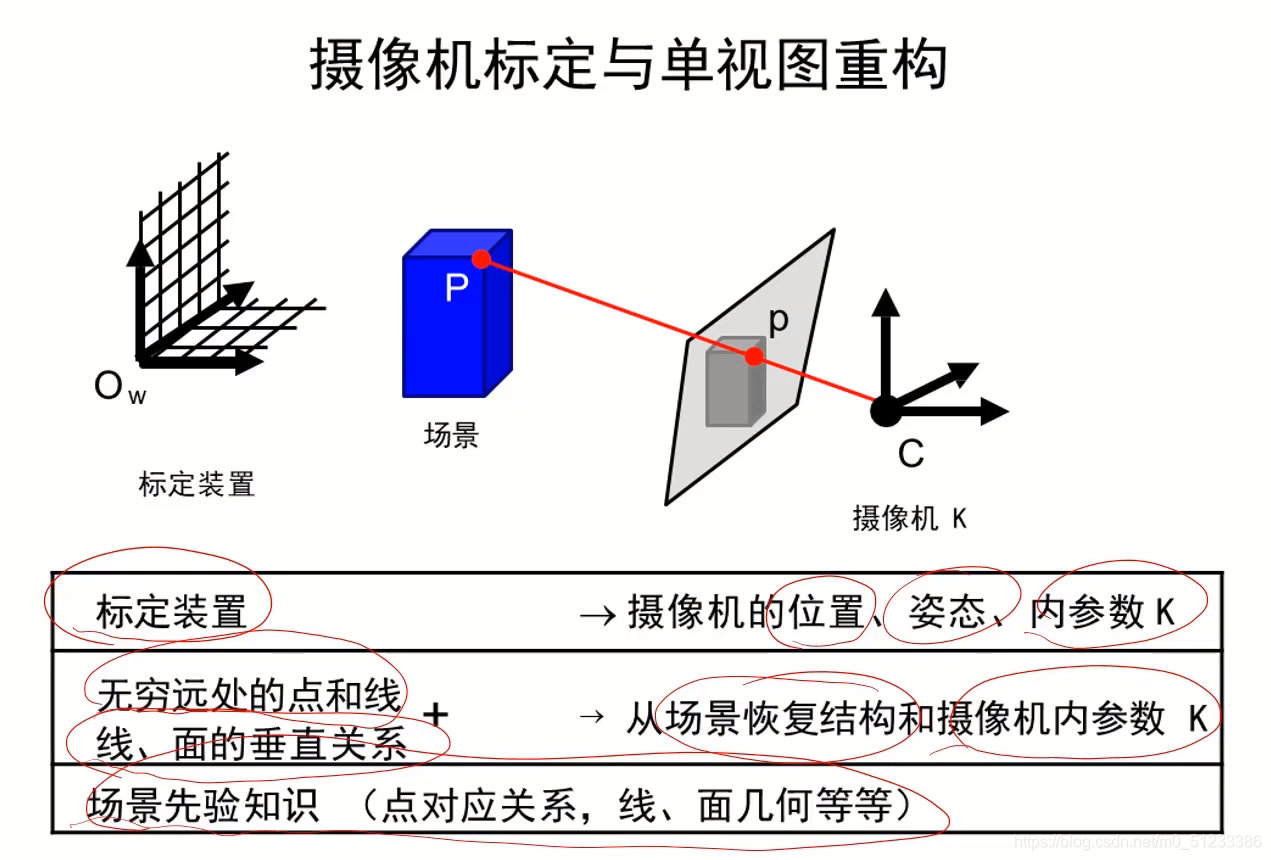
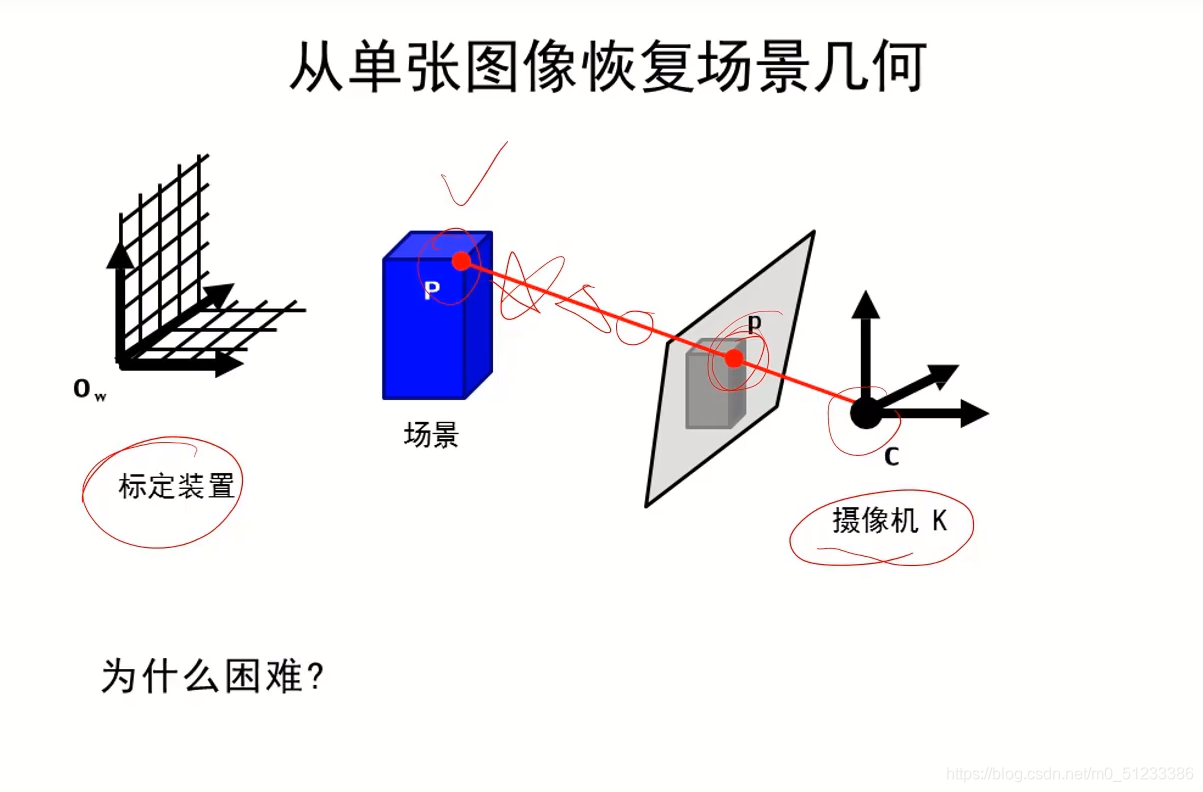
先验信息告诉我们,相机离这个人很近,离塔很远
但是如果没有这些先验信息,就会给我们带来歧义困惑

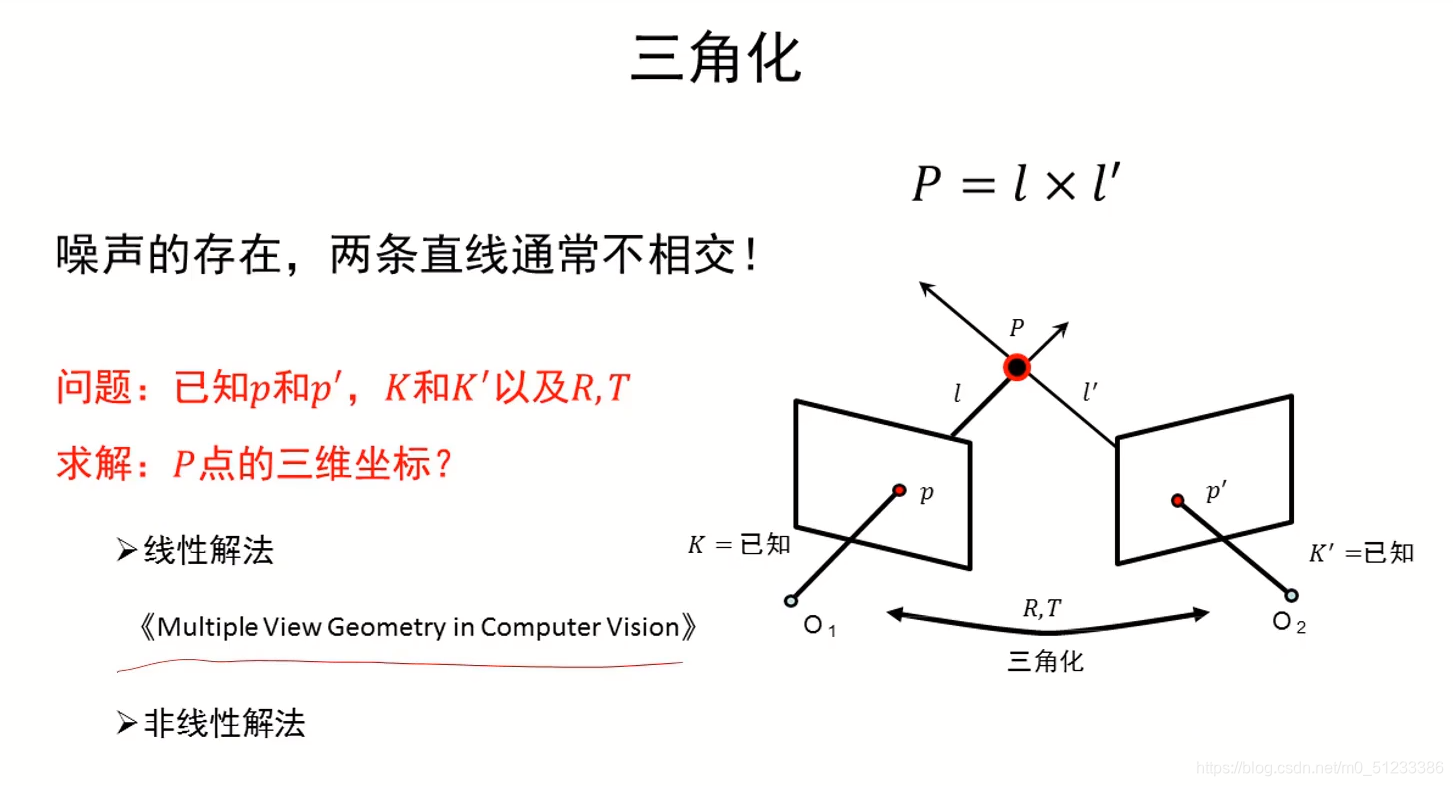
1.2.双目视觉
两个相机三角化,可以准确的感受深度
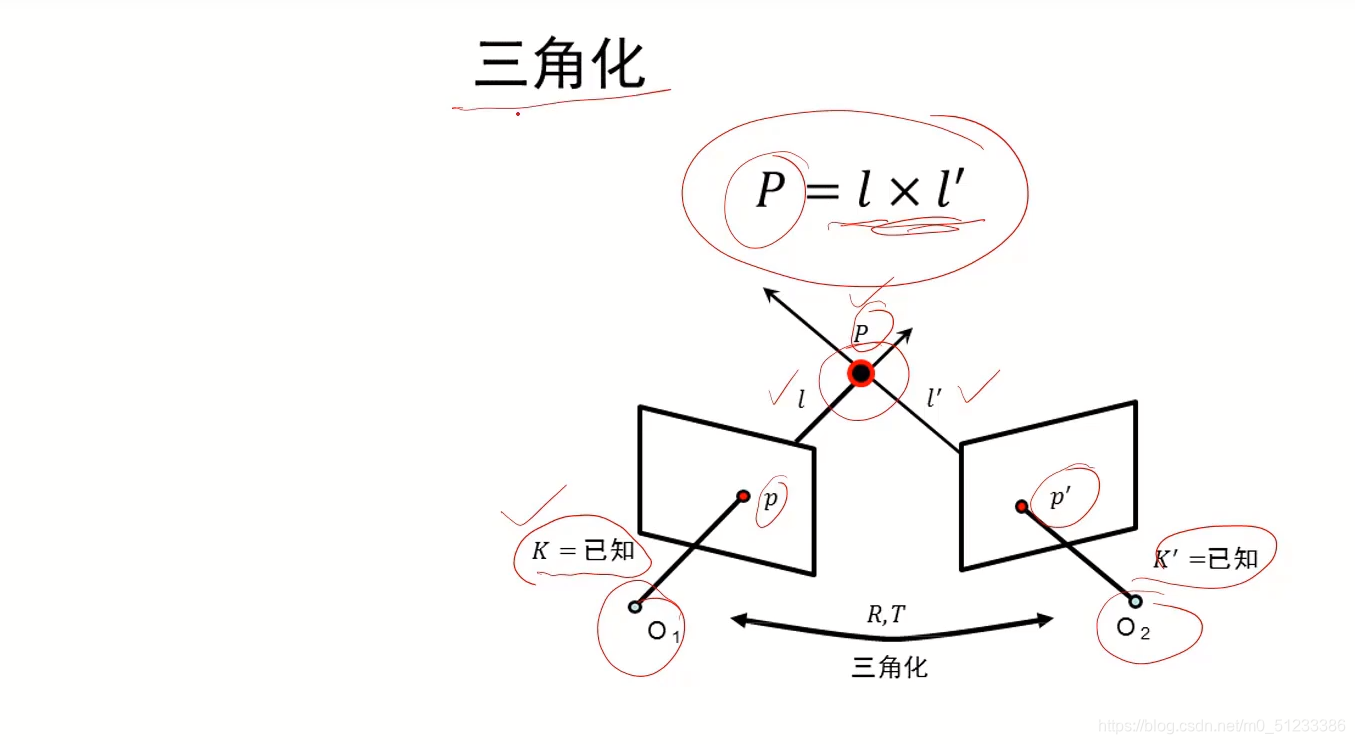
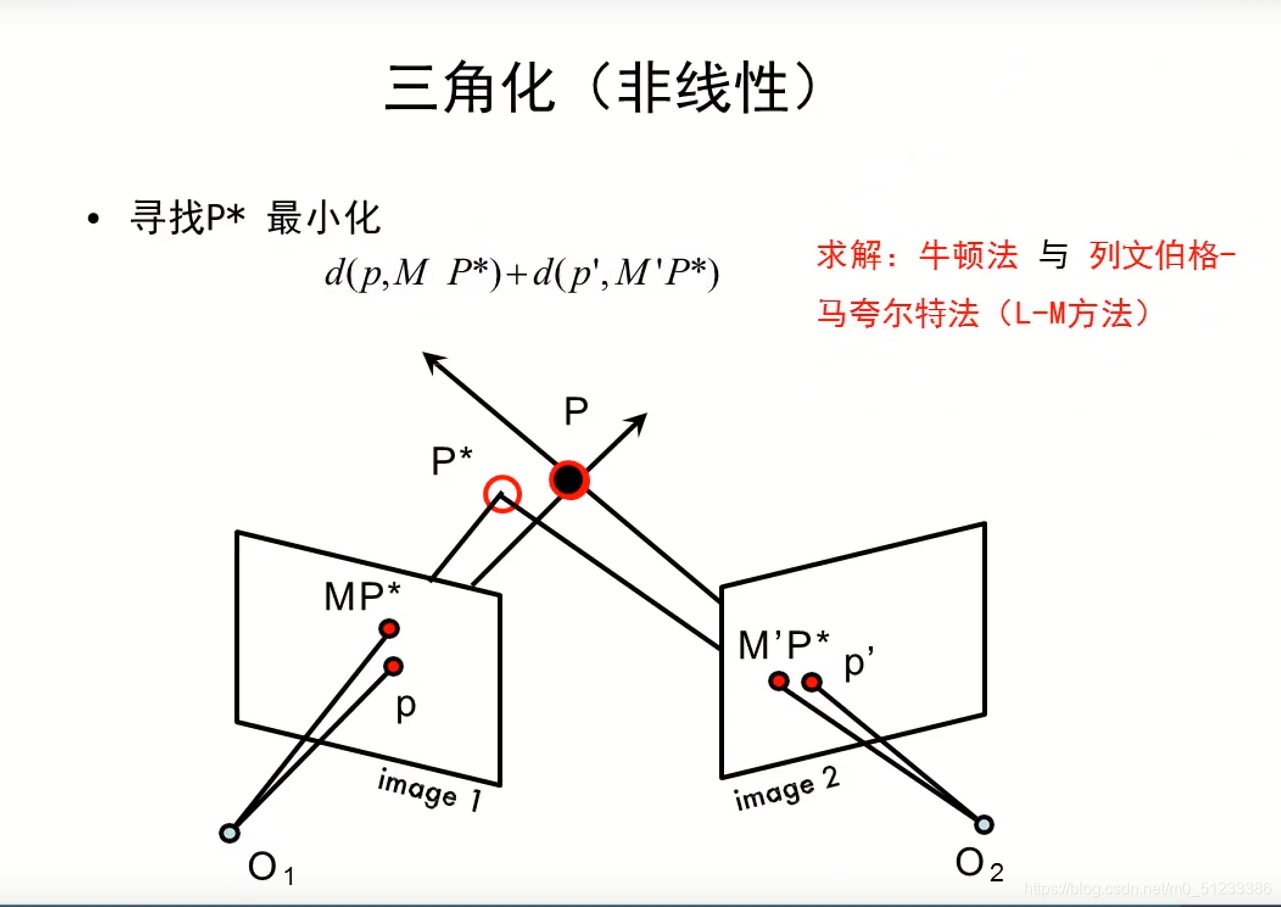
但是在实际使用中,我们很少使用,叉乘交点的这种方法去做
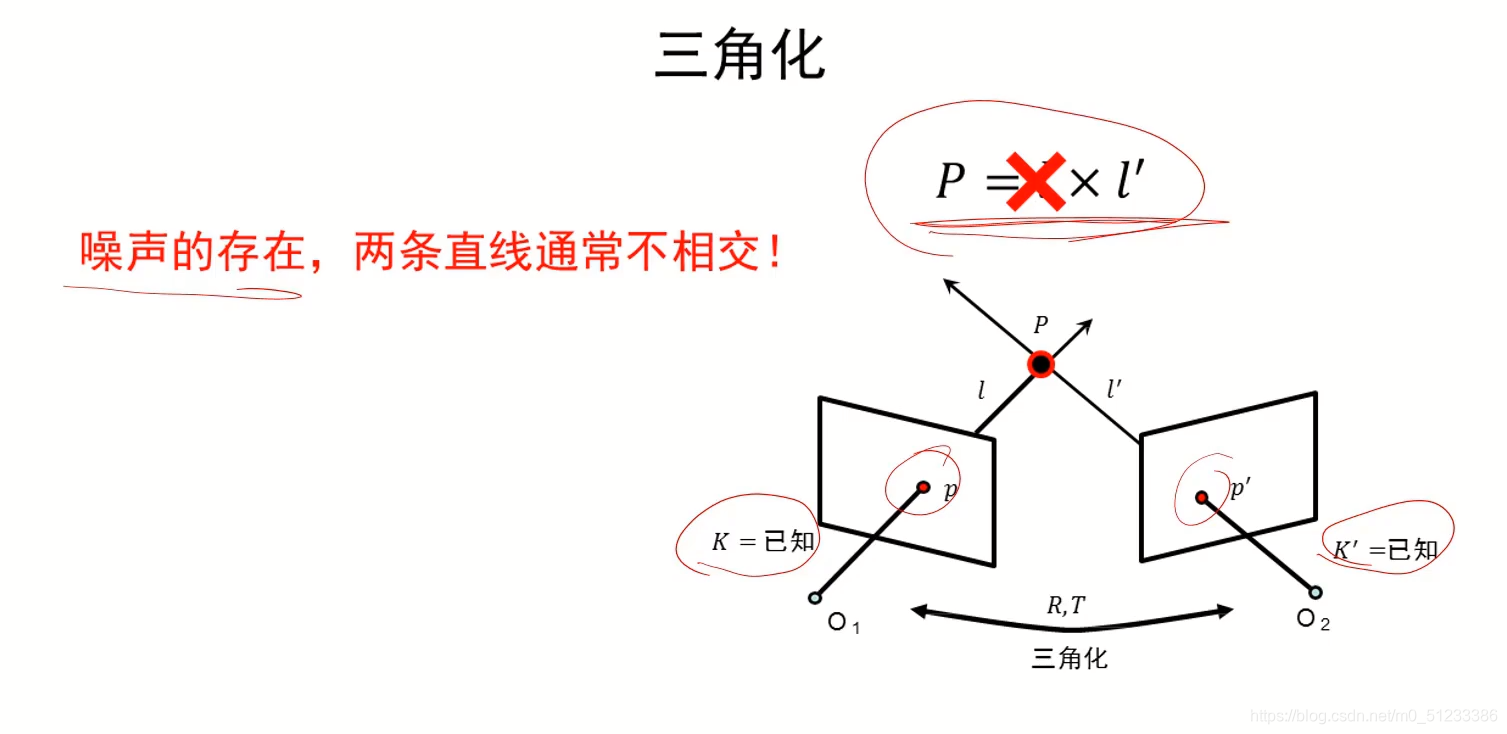
要先把问题描述成数学问题,在求解
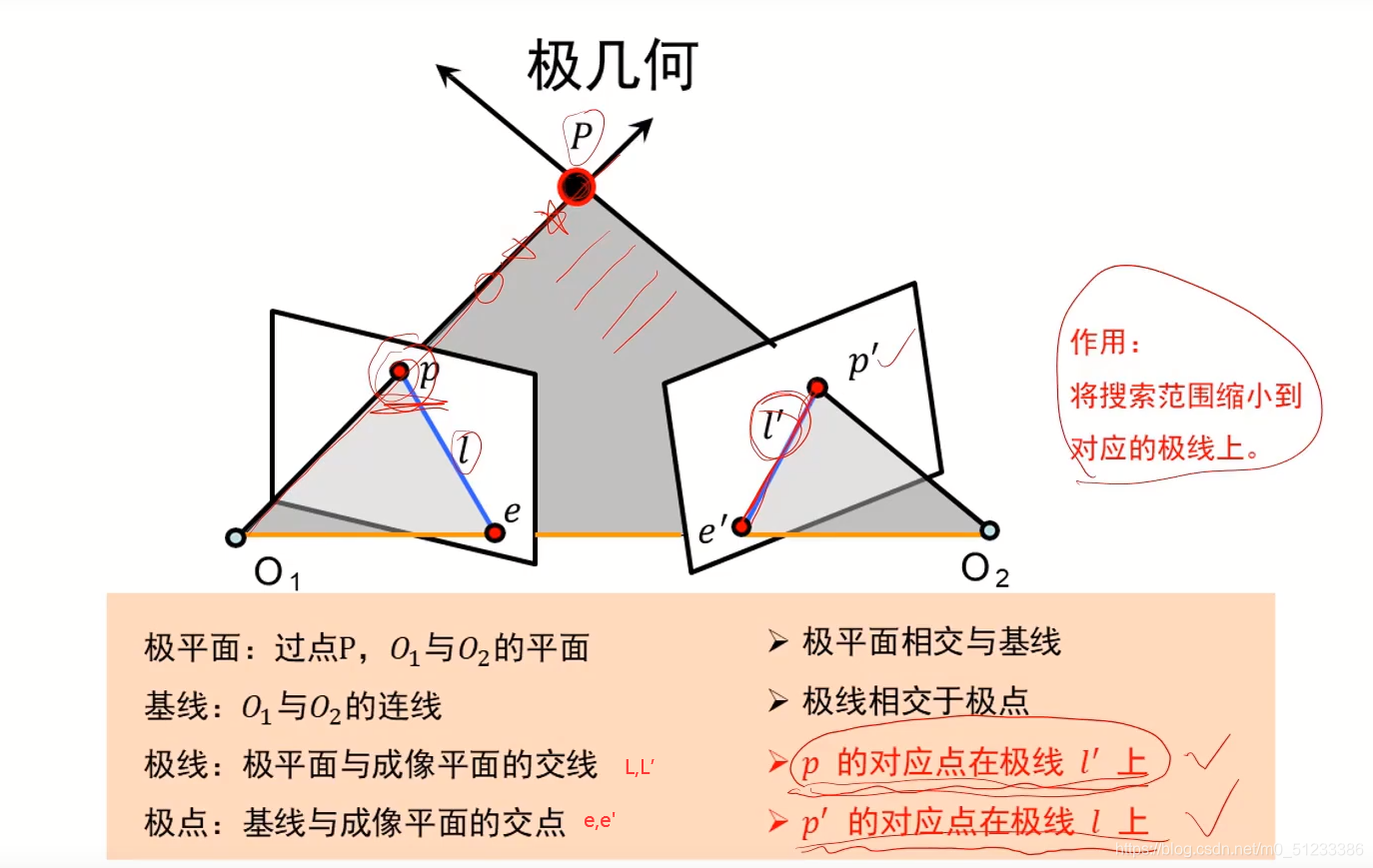
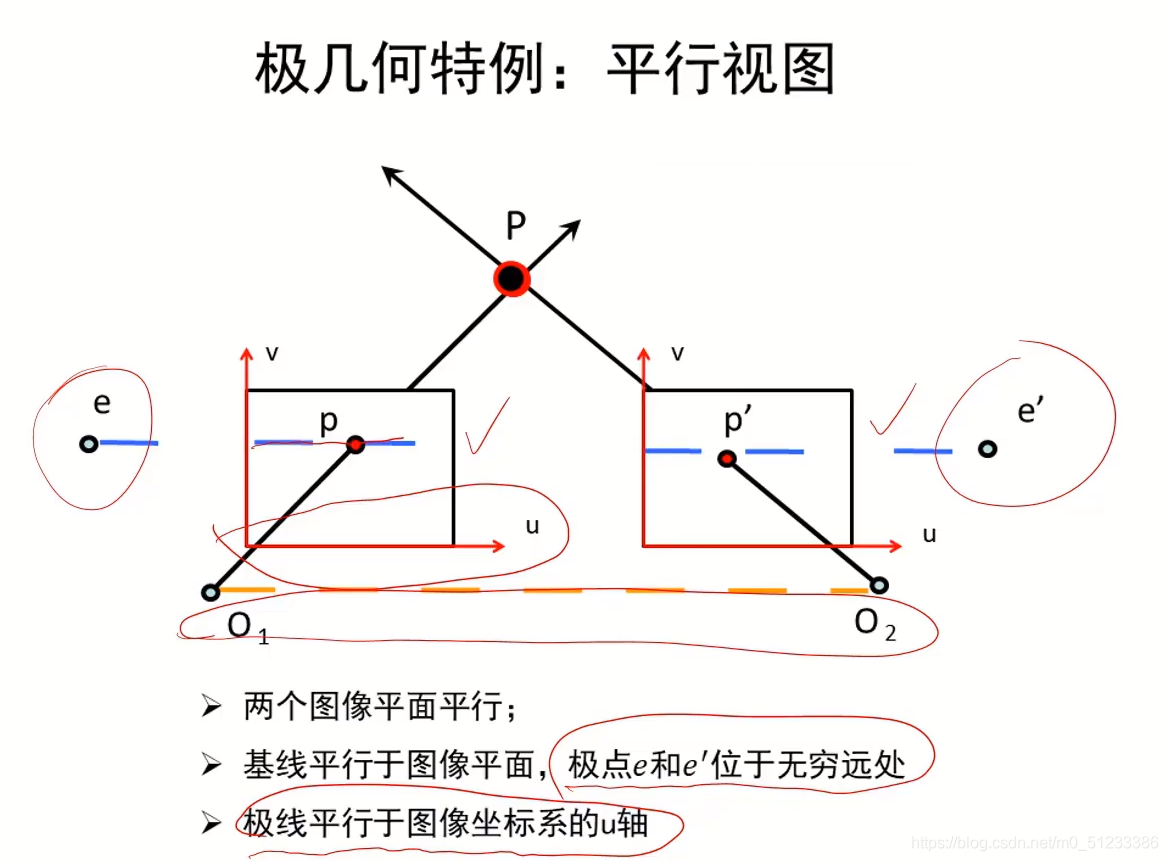
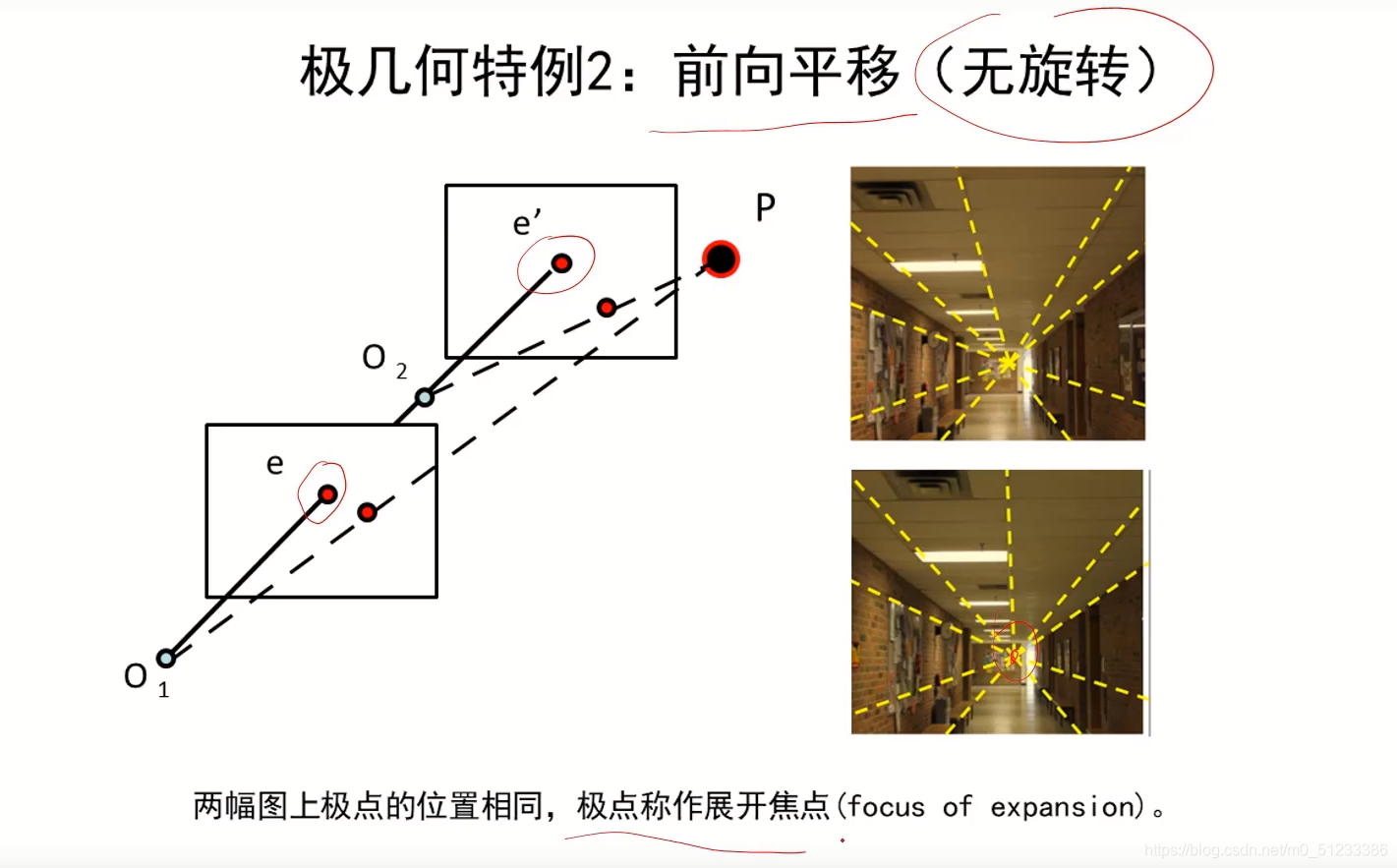
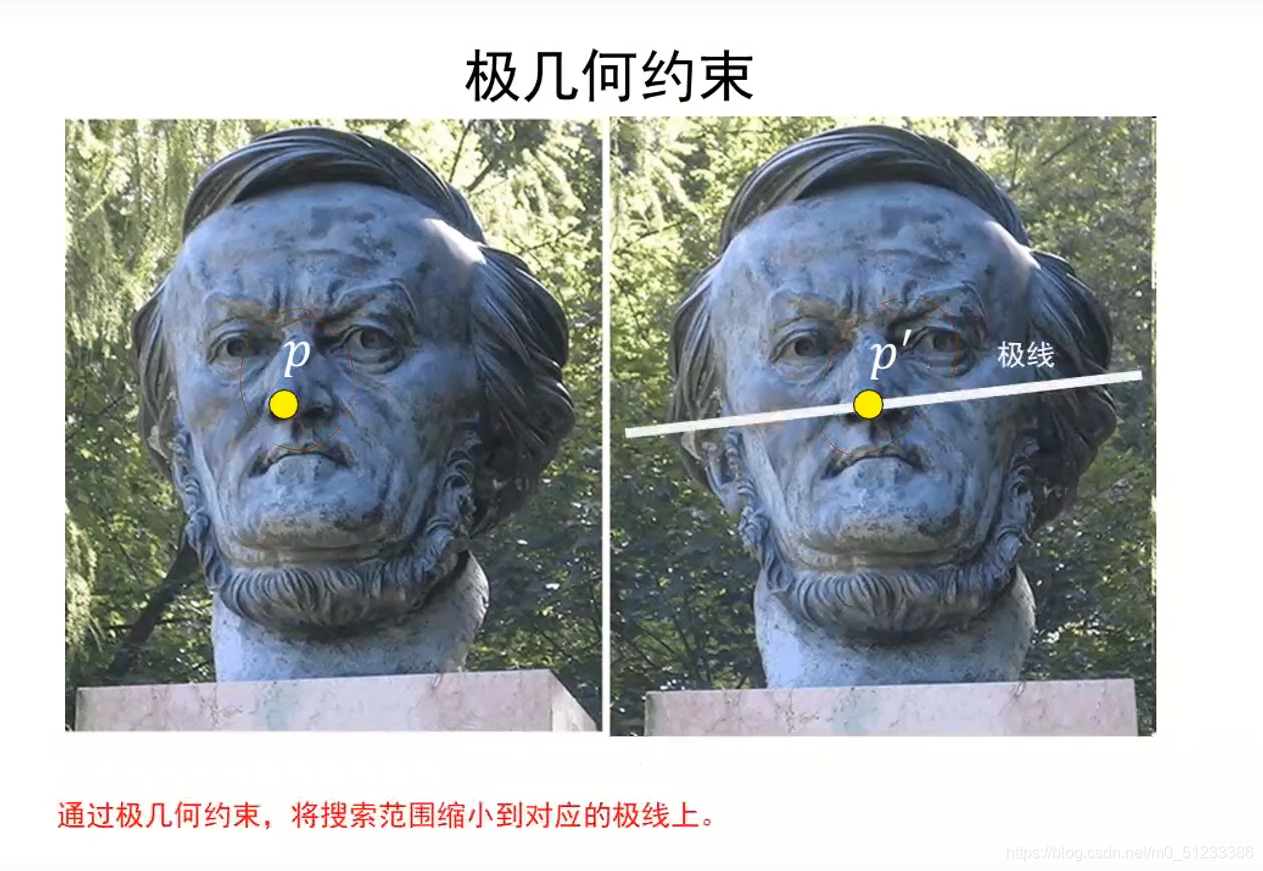
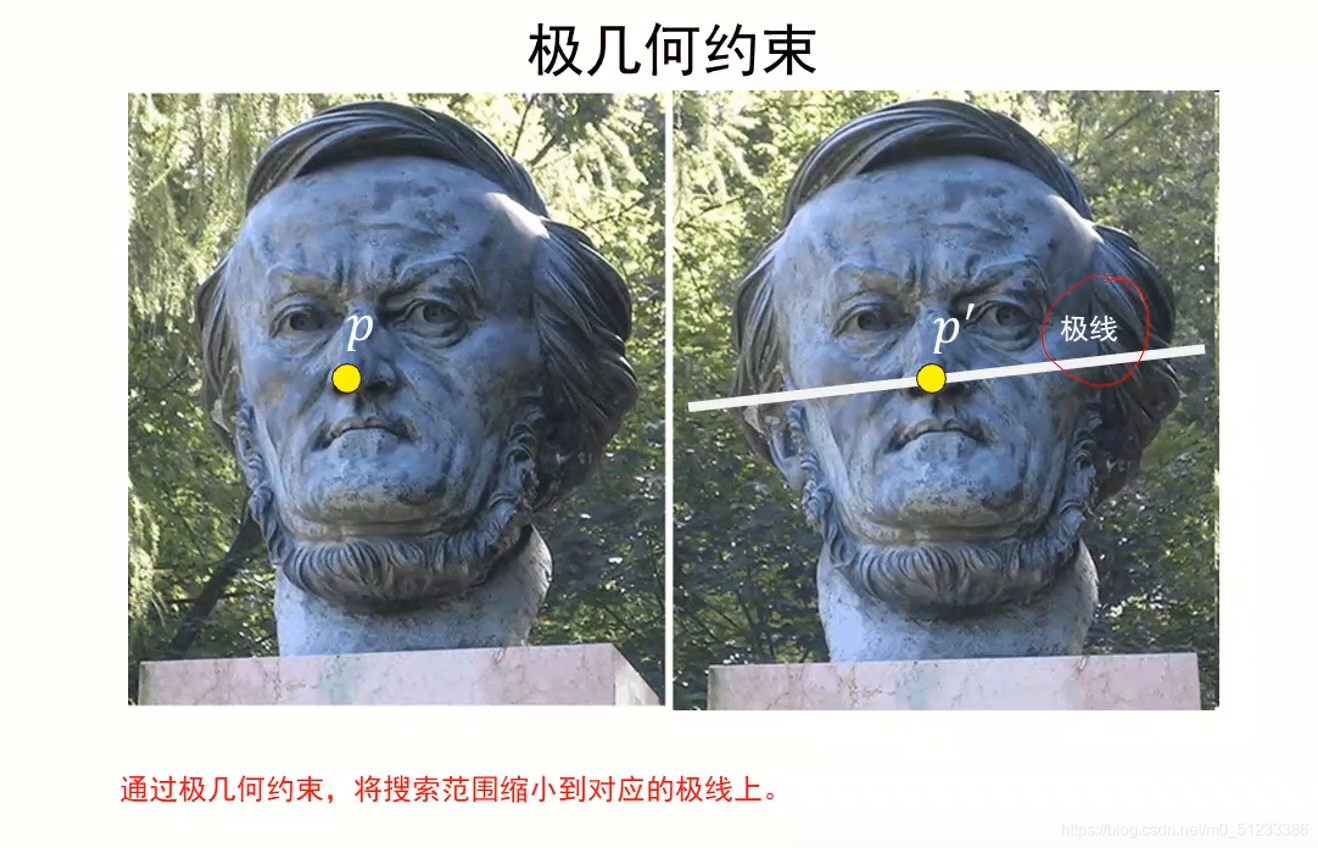
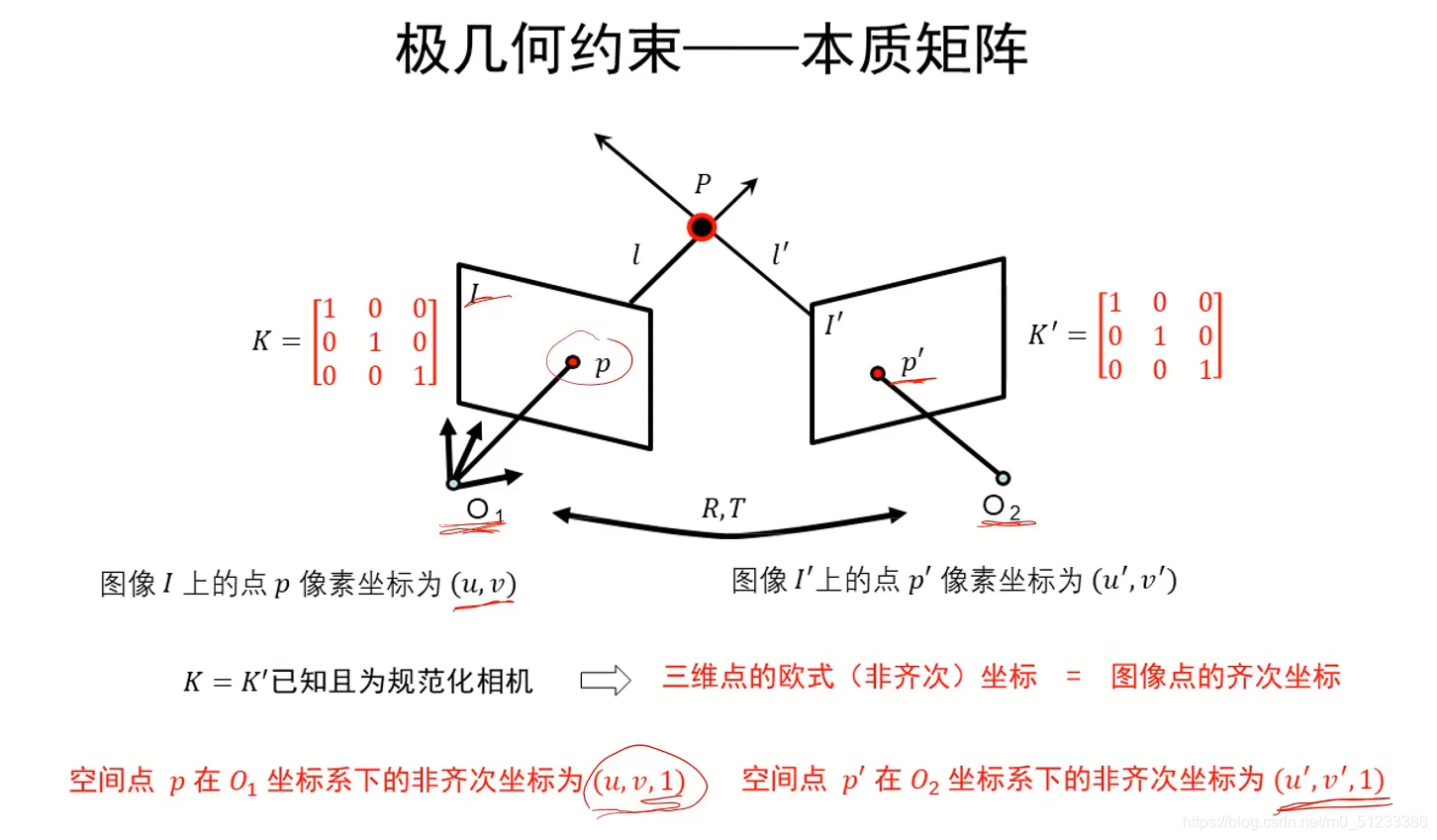
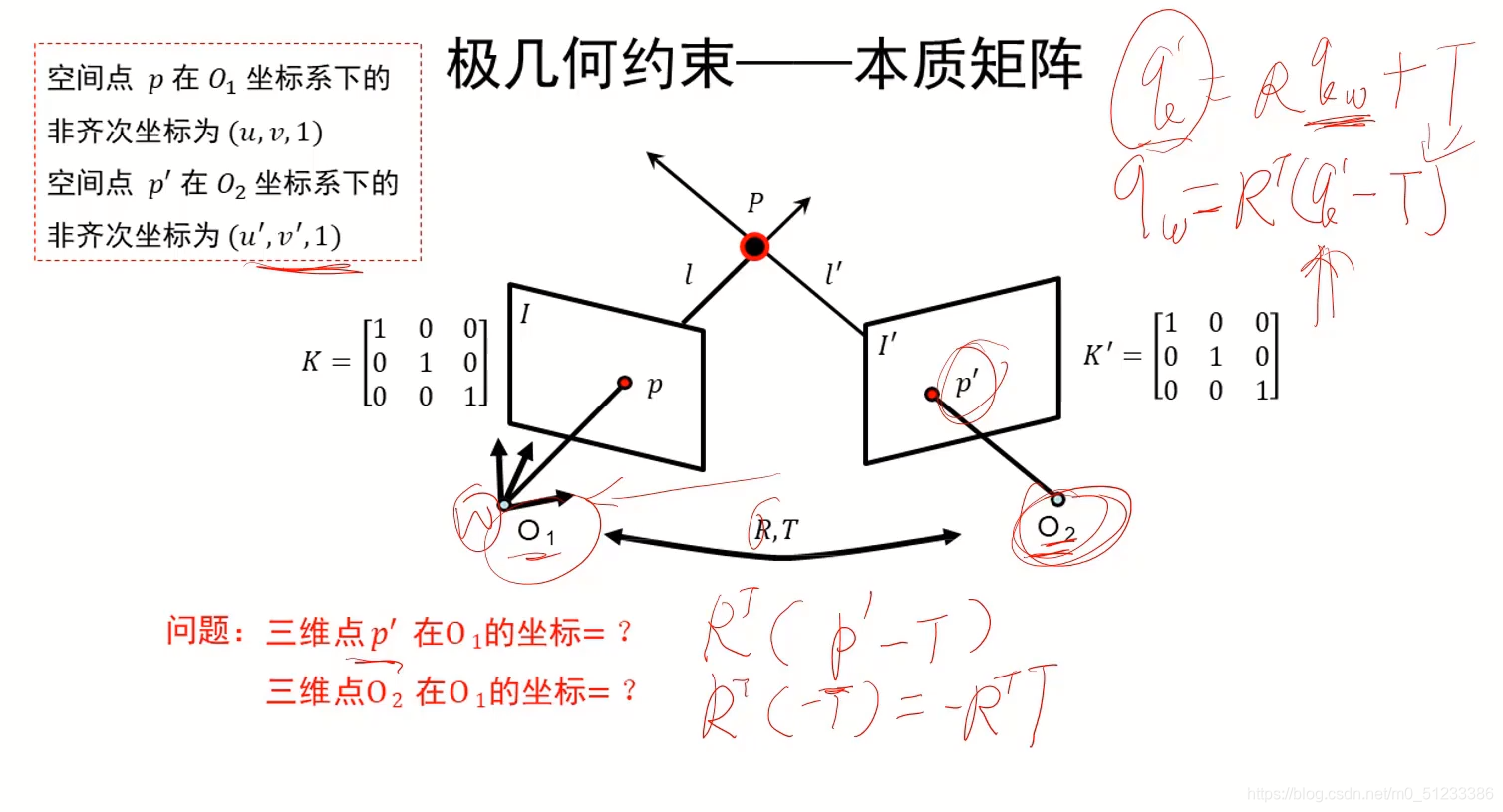
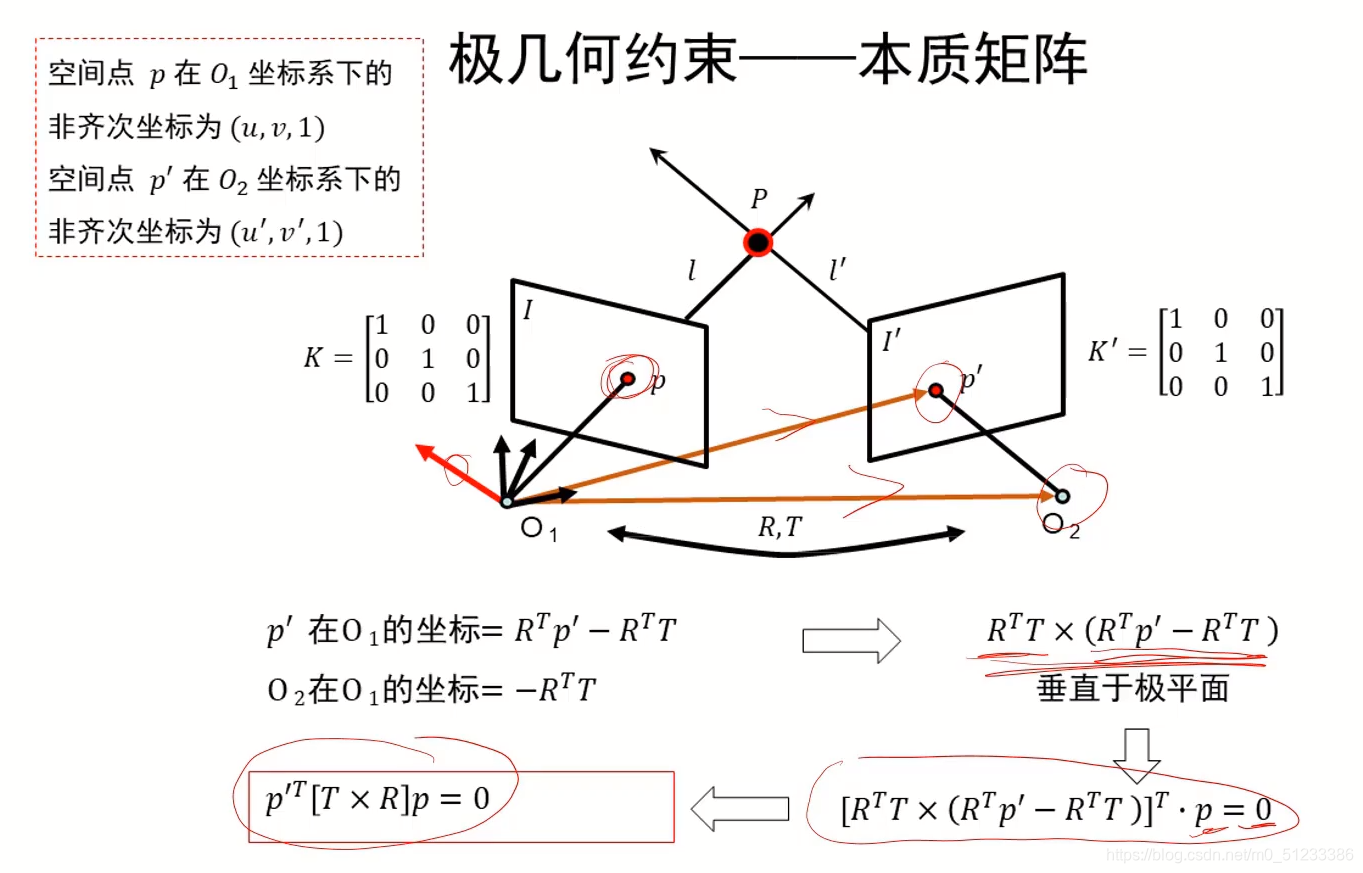
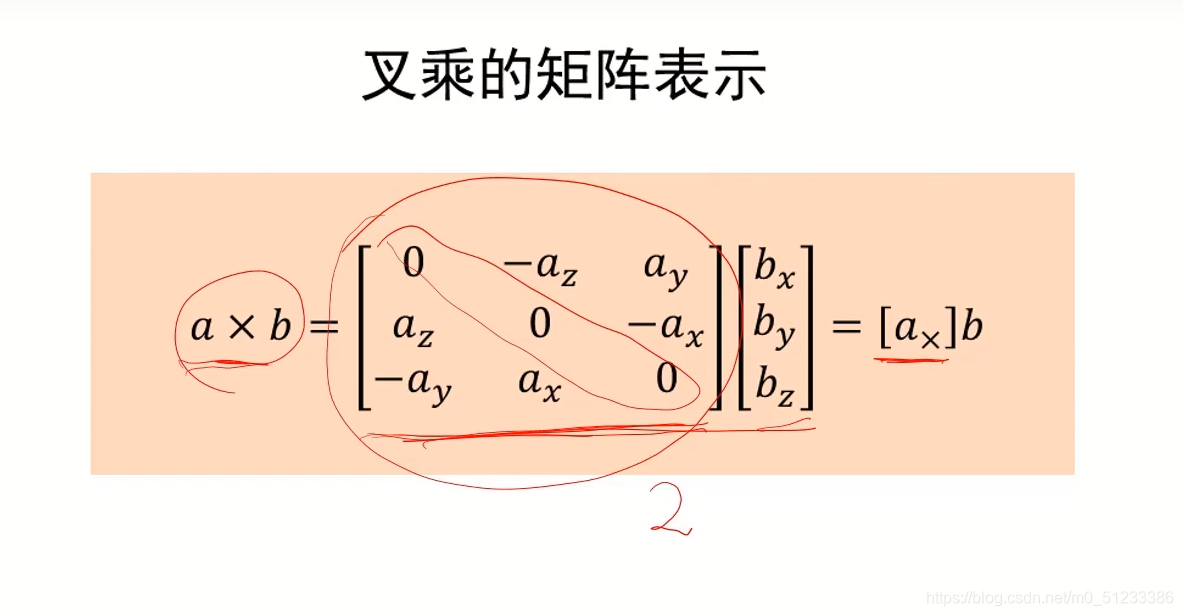
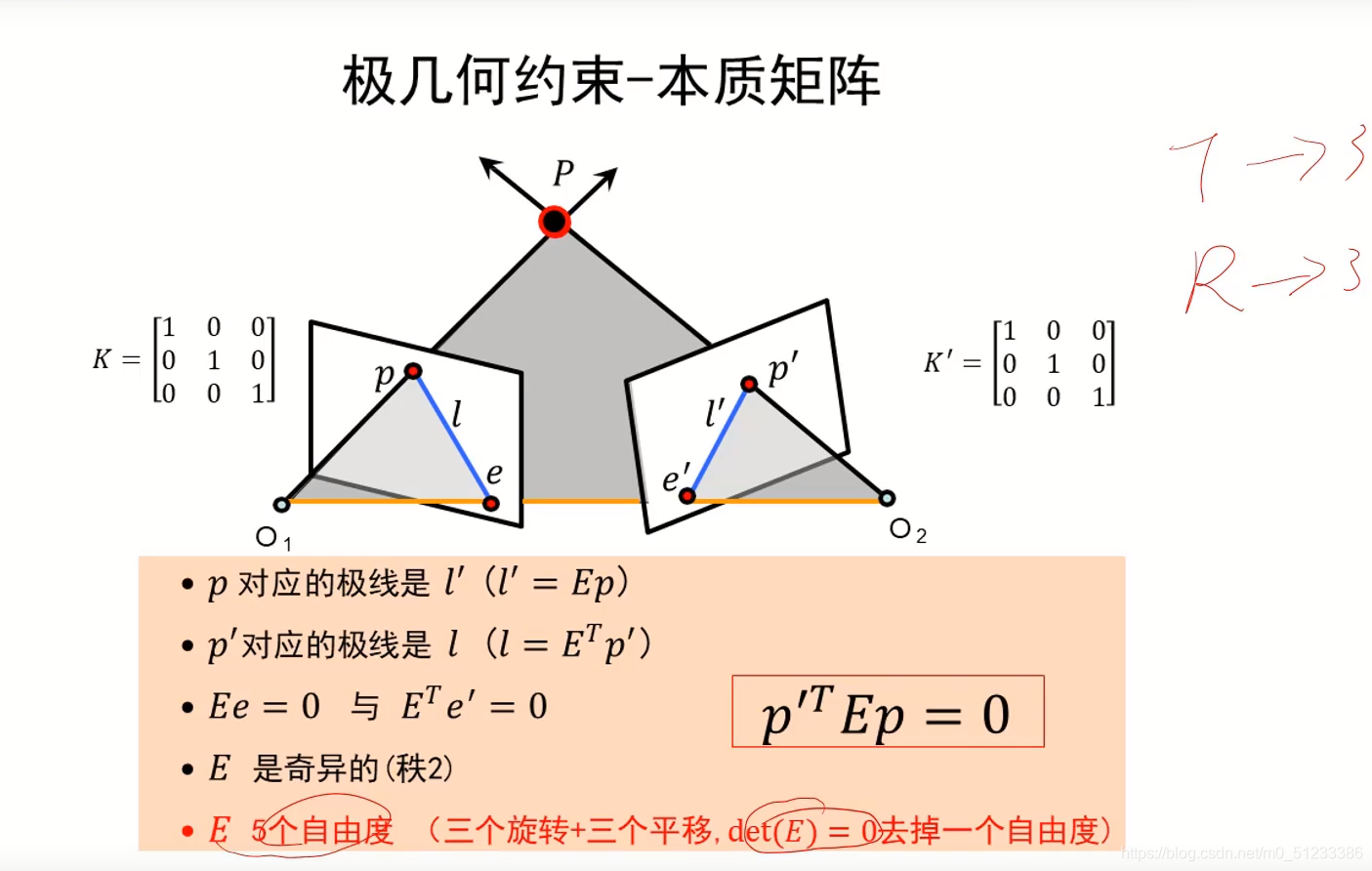
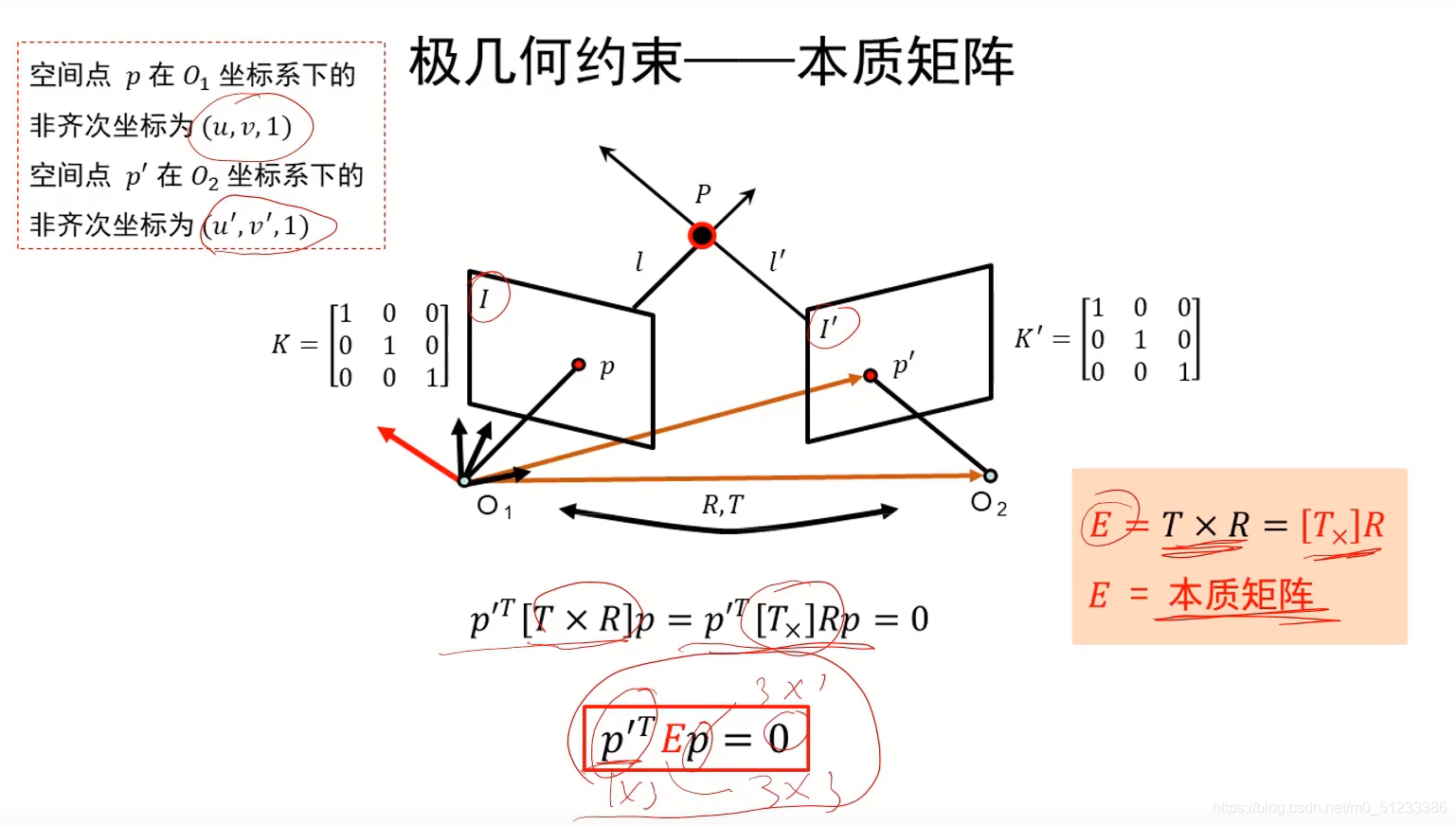
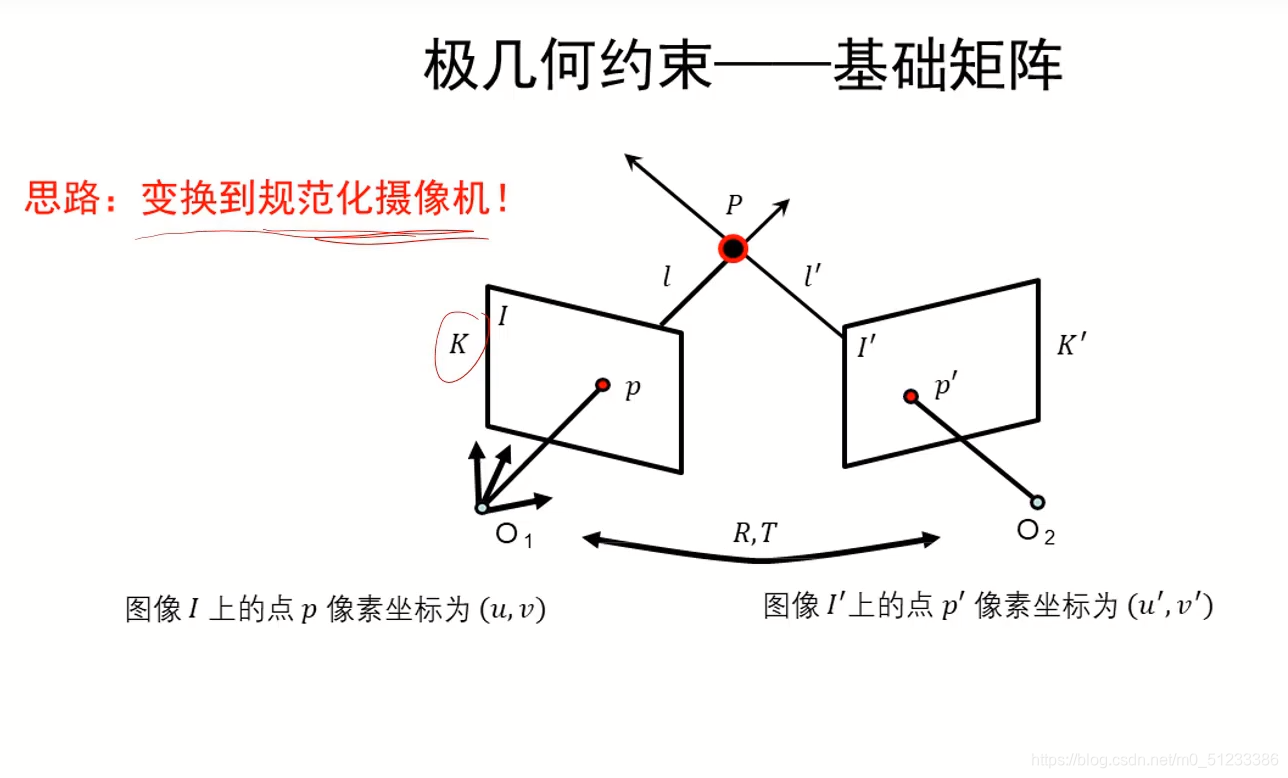
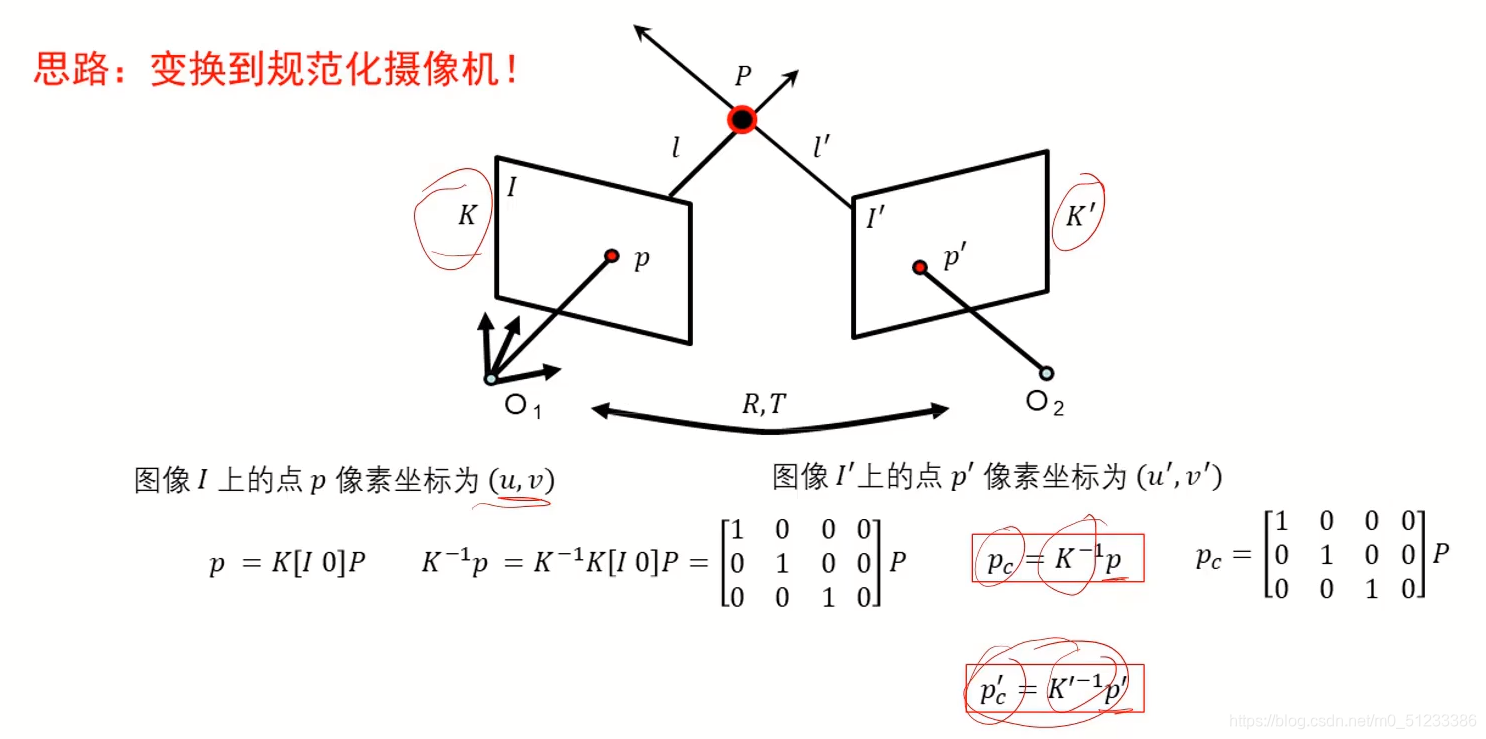
2. 极几何
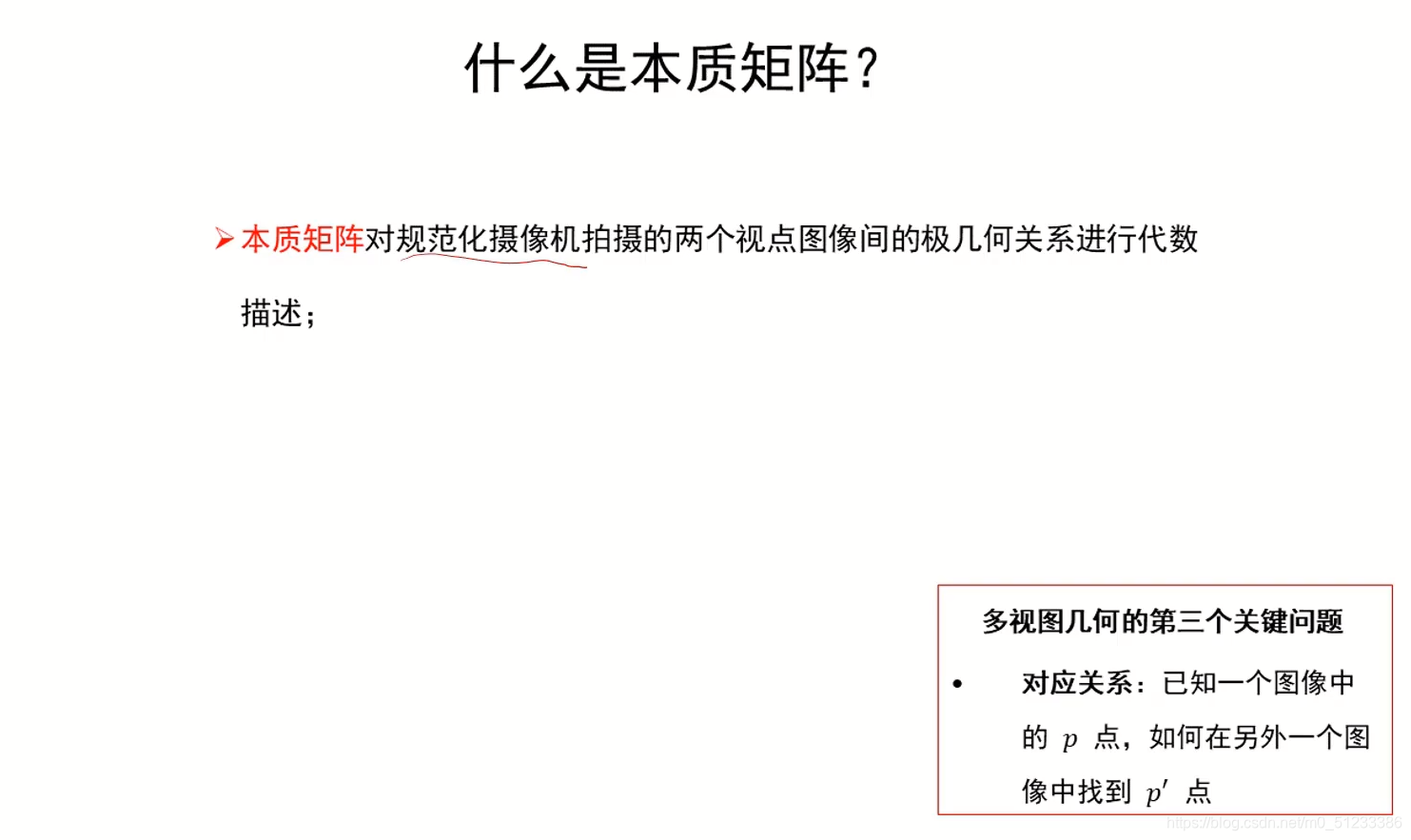
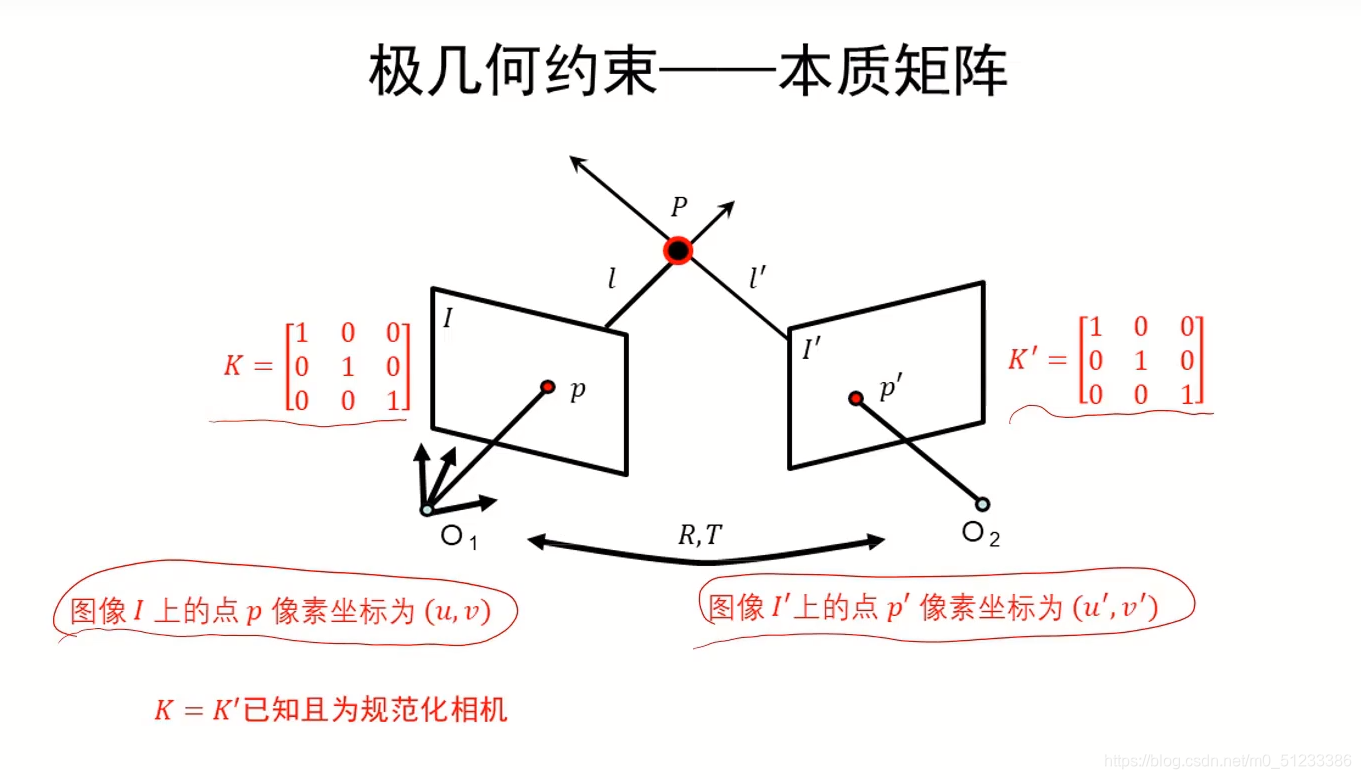
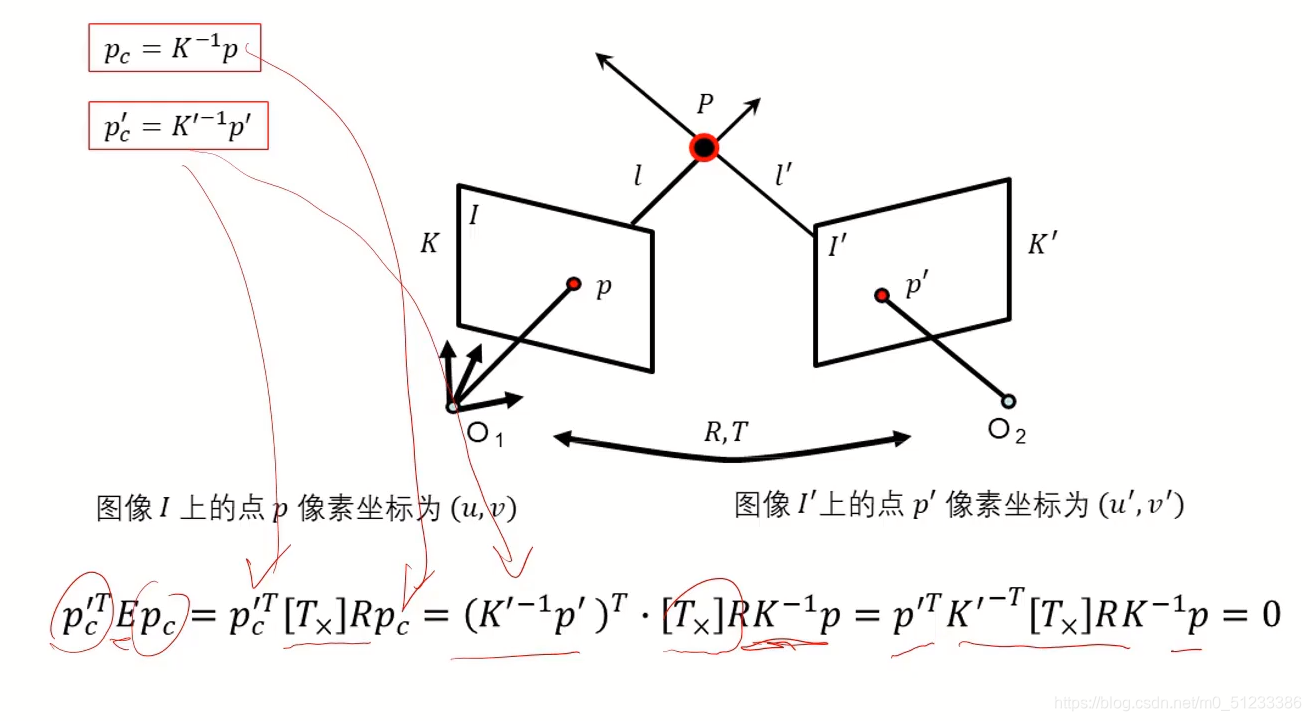
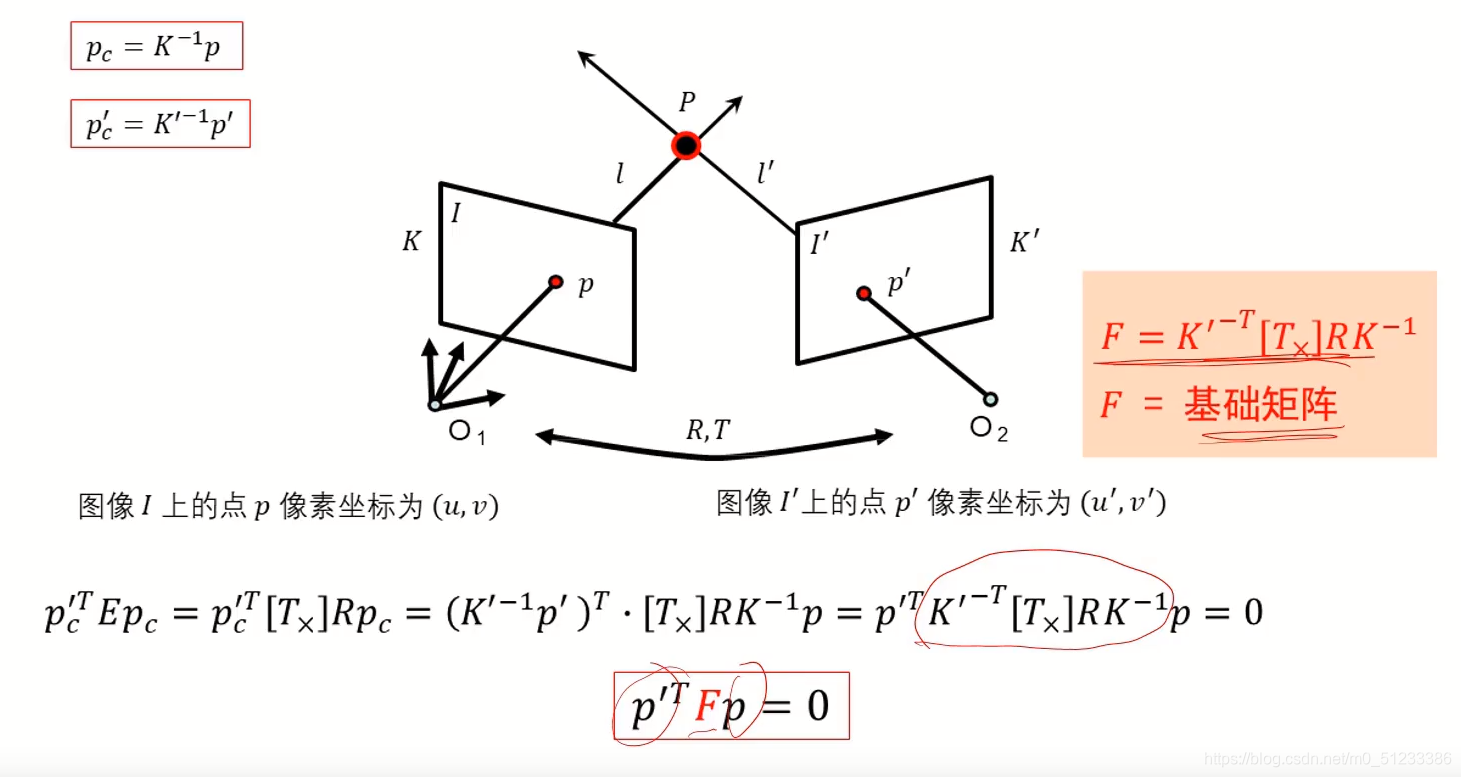
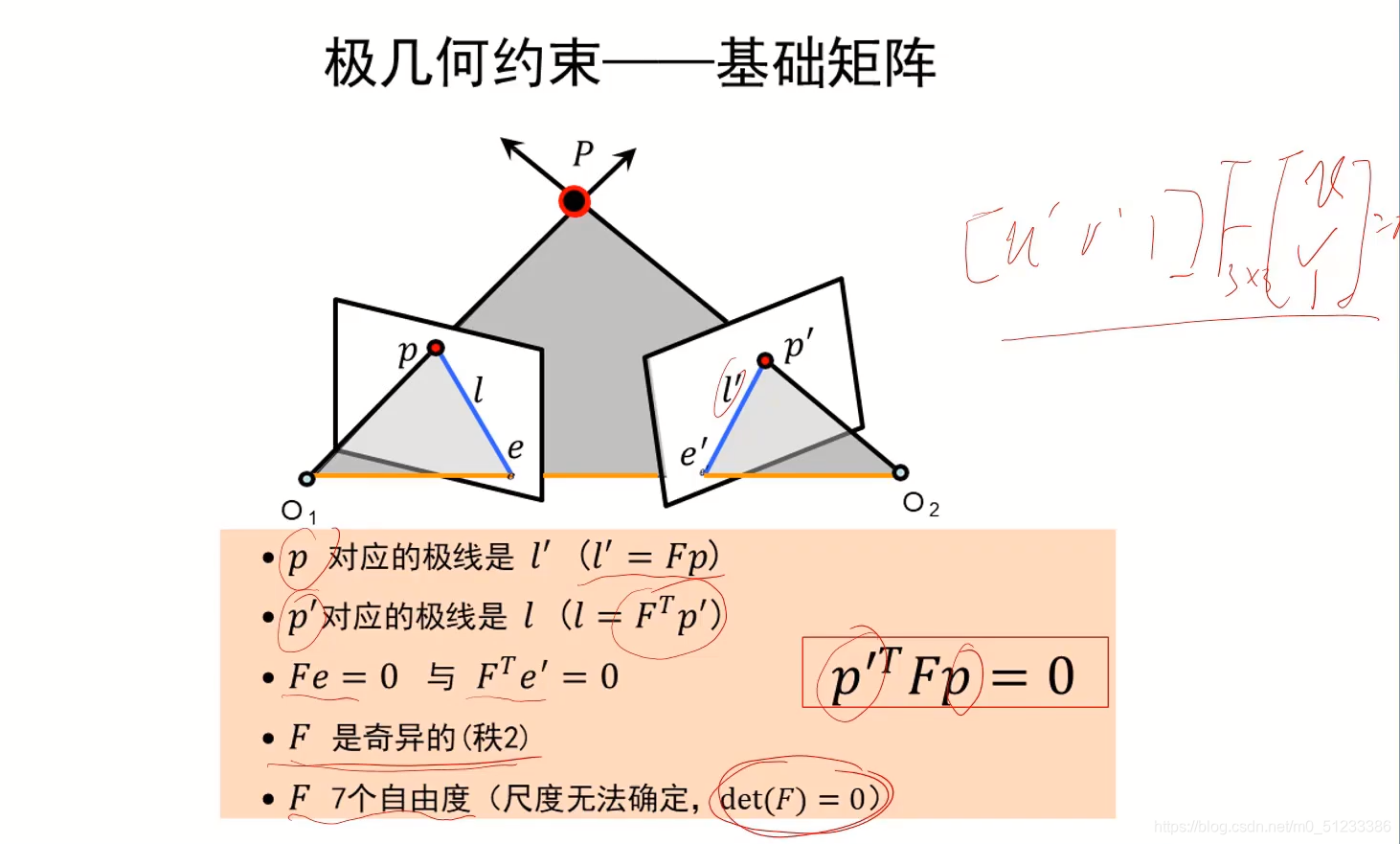
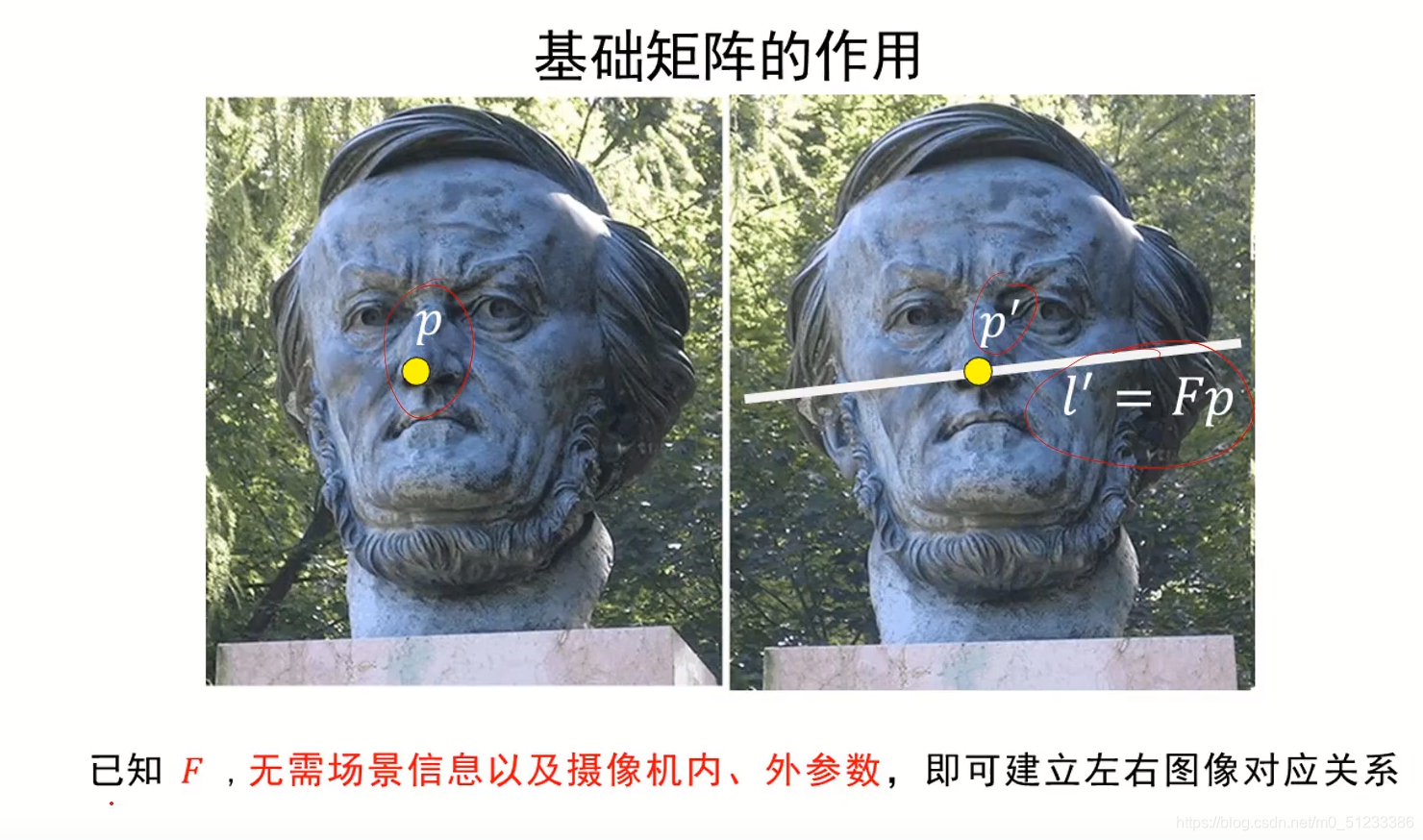
3. 本质矩阵与基础矩阵
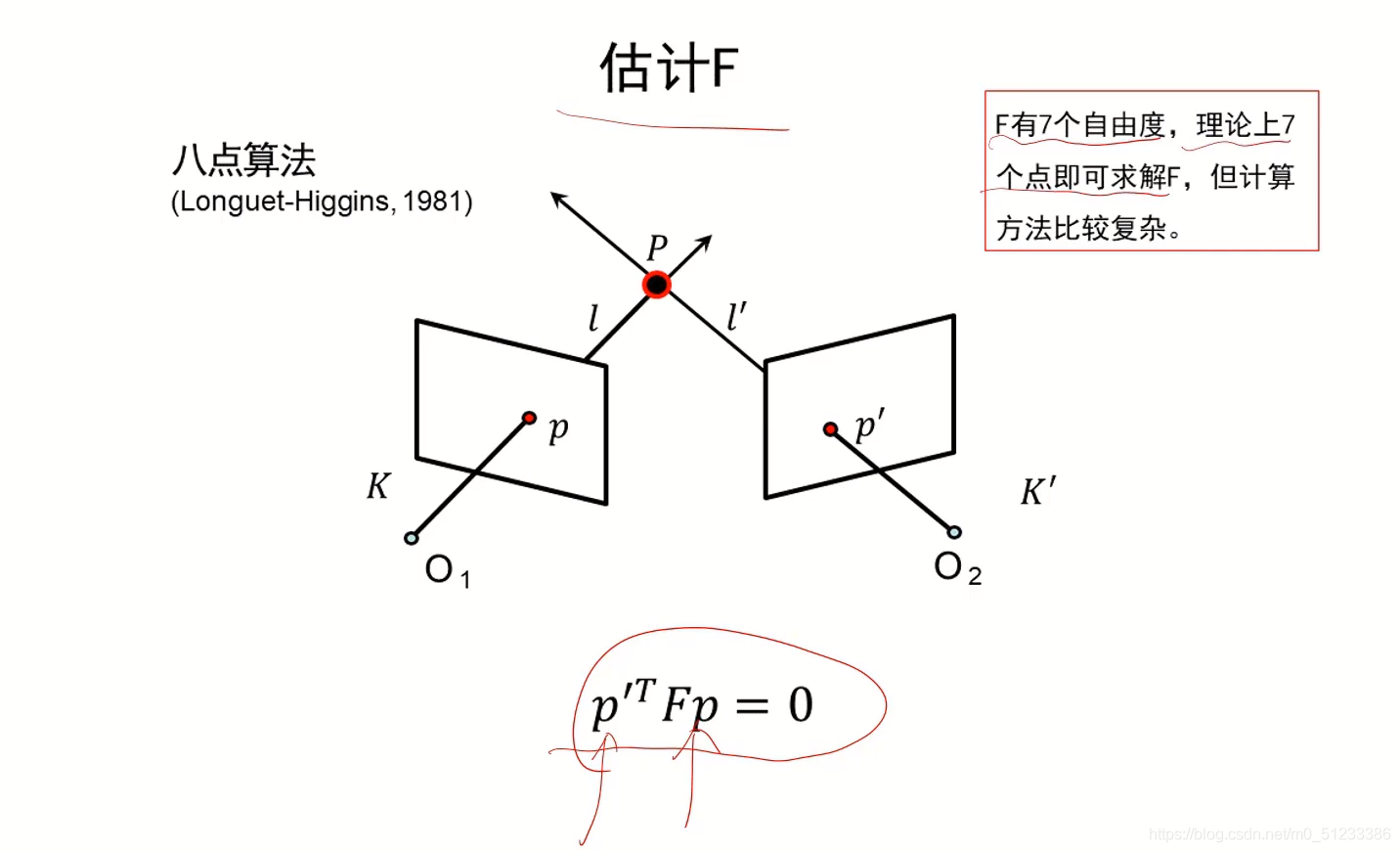
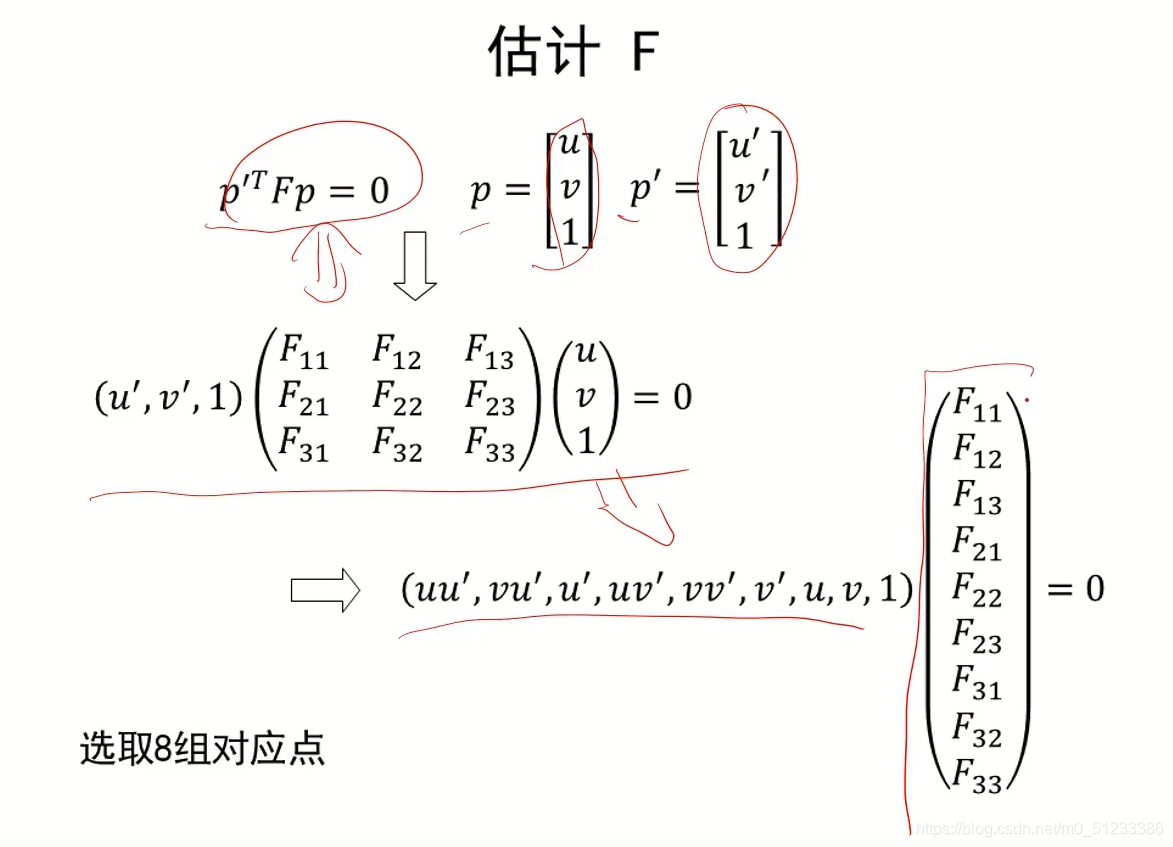
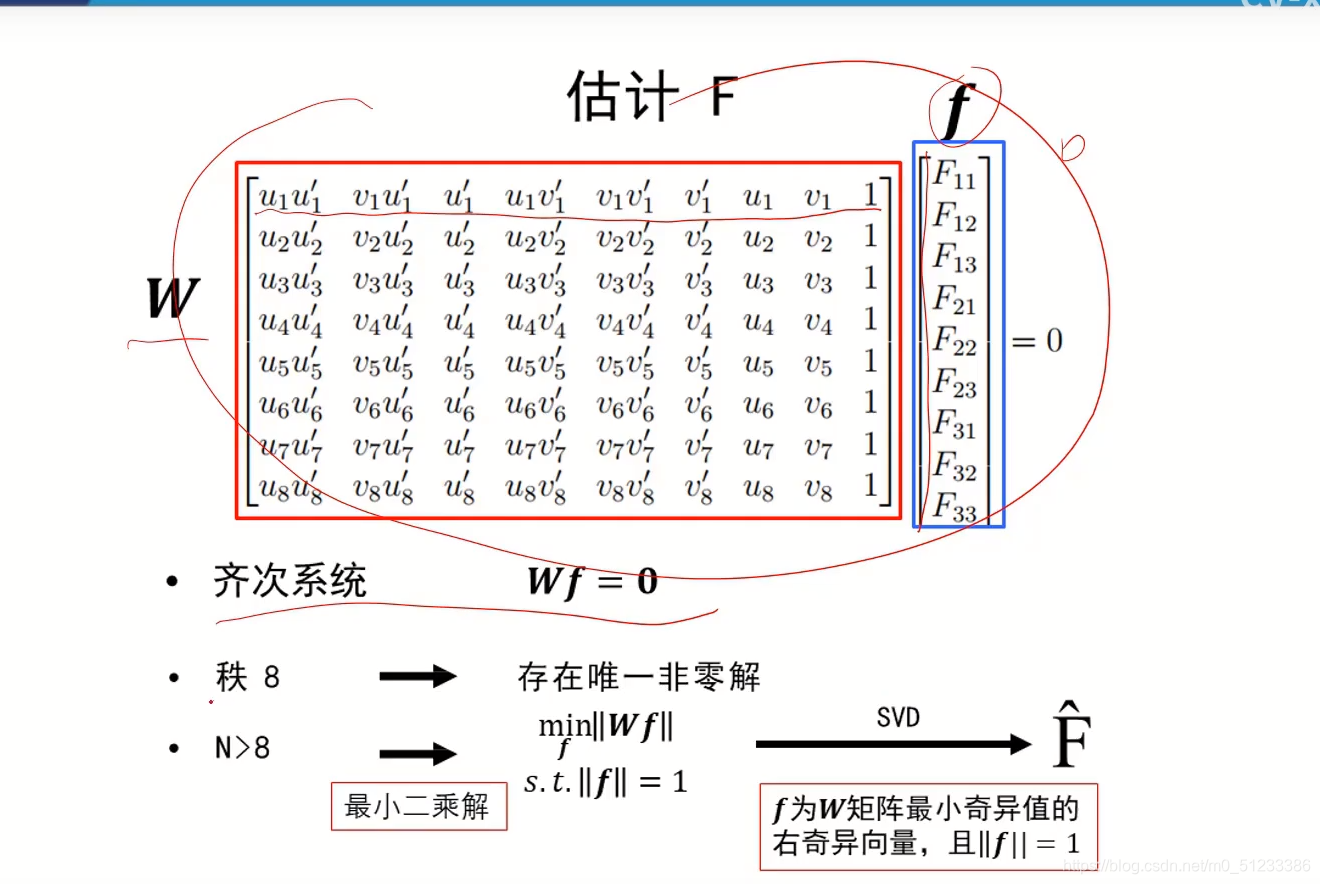
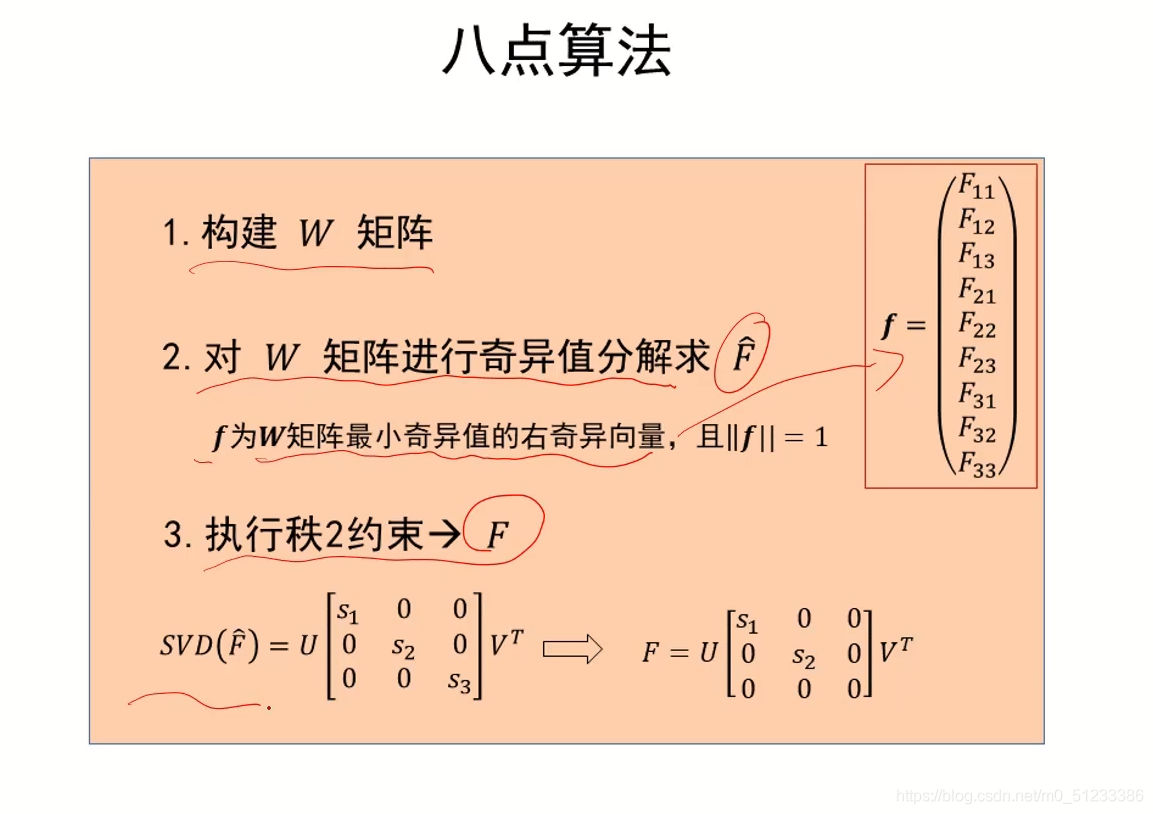
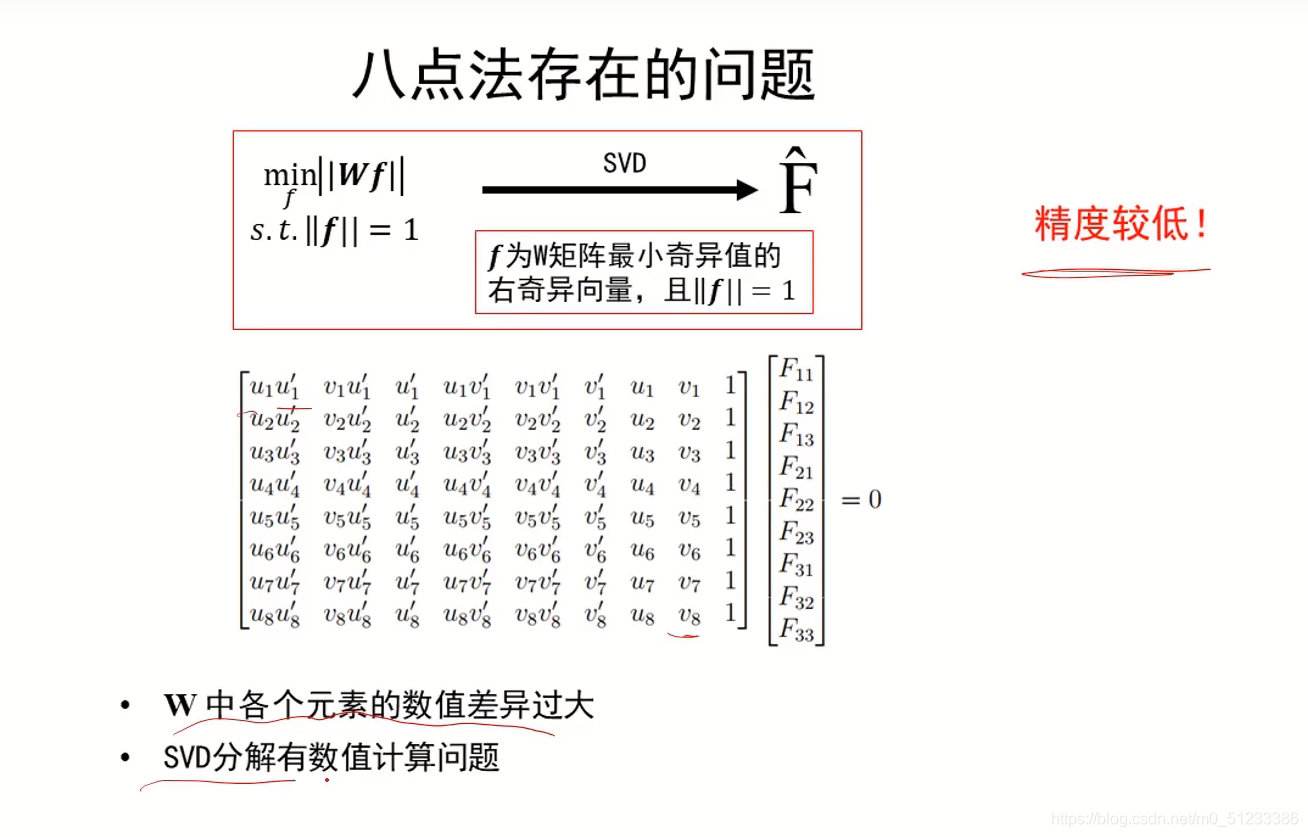
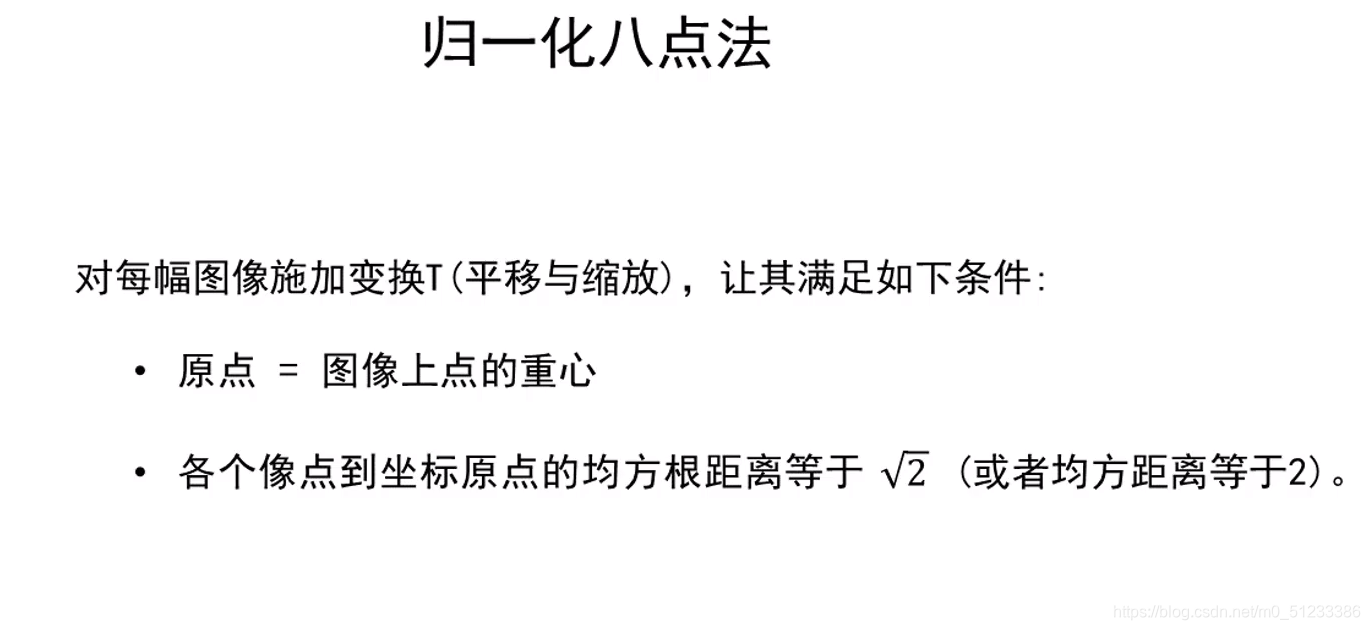
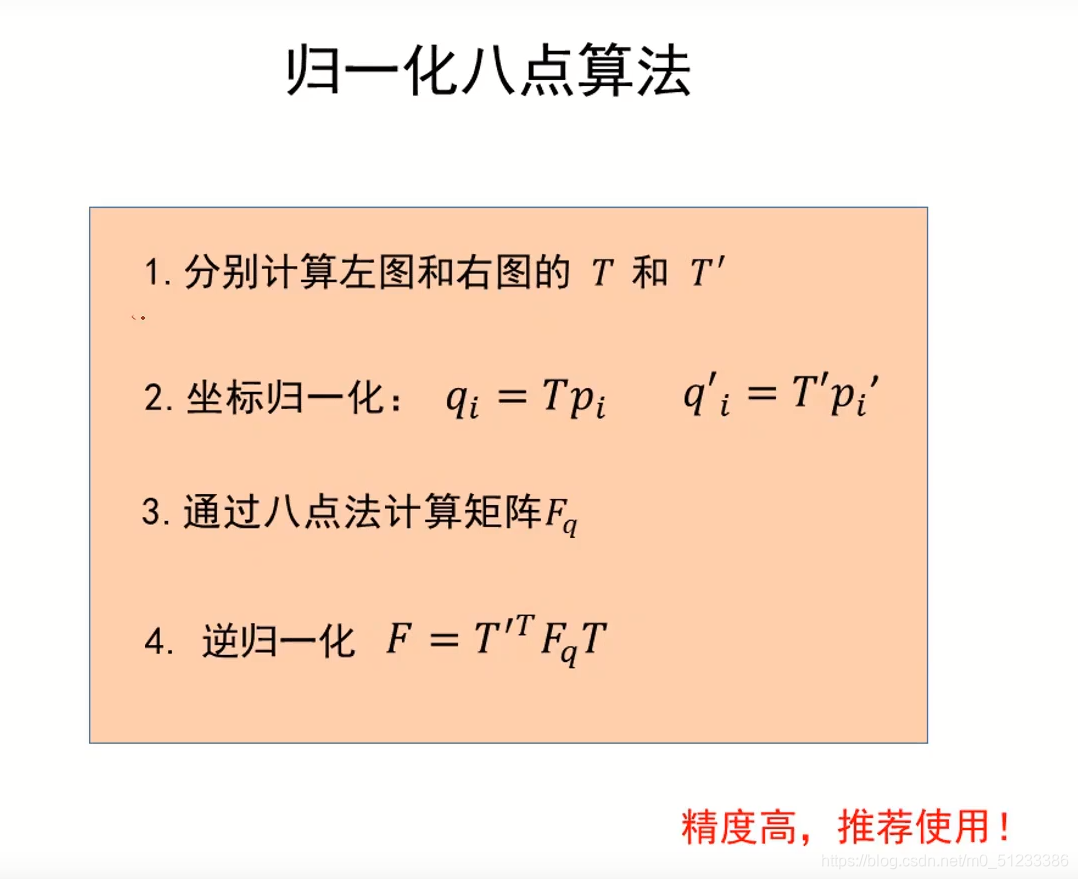
4. 基础矩阵估计

视频教程
视频教程:计算机视觉之三维重建篇(精简版) 北京邮电大学 鲁鹏
三维重建基础理论 全部教程
三维重建——基础理论(一):摄像机几何原理(针孔摄像机、透镜、坐标变换、世界坐标系、投影变换性质)
三维重建——基础理论(二):摄像机标定、 径向畸变摄像机标定原理
三维重建——基础理论(三):单视图测量原理(二维变换、影消点和影消线、二维空间中点线面、三维空间、单视图三维重构)
三维重建——基础理论(四):三维重建基础与极几何原理(三维重建基础、单视图回忆、双目视觉、极几何、本质矩阵与基础矩阵、基础矩阵估计)
三维重建——基础理论(五):双目立体视觉系统(双目立体视觉系统与平行视图、平行视图校正、平行视图的对应点搜索)
三维重建——基础理论(六):多视图几何原理(运动恢复结构问题、仿射结构恢复、透视结构恢复)