控制系统仿真之PID校正-利用PID控制器、PID调节器实现(九)
一、前情回顾
在搭建了分项PID校正之后,系统框图如下。
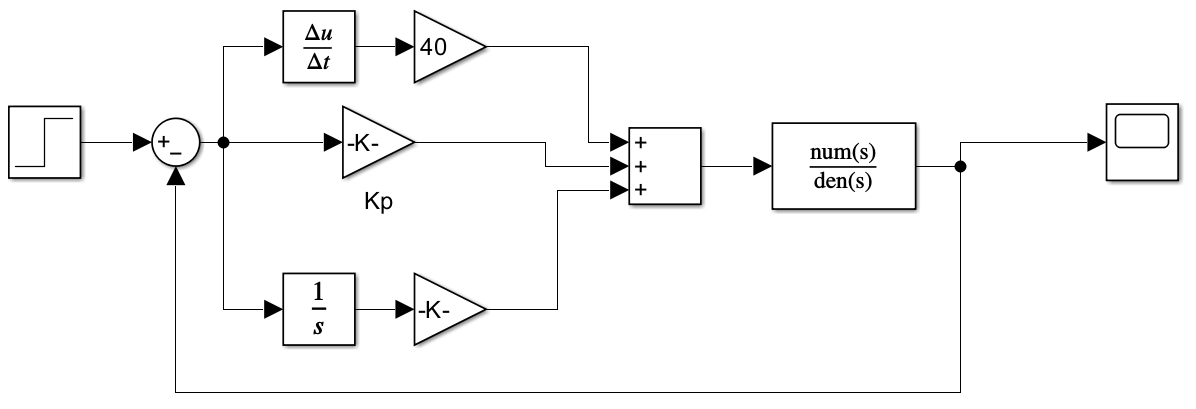
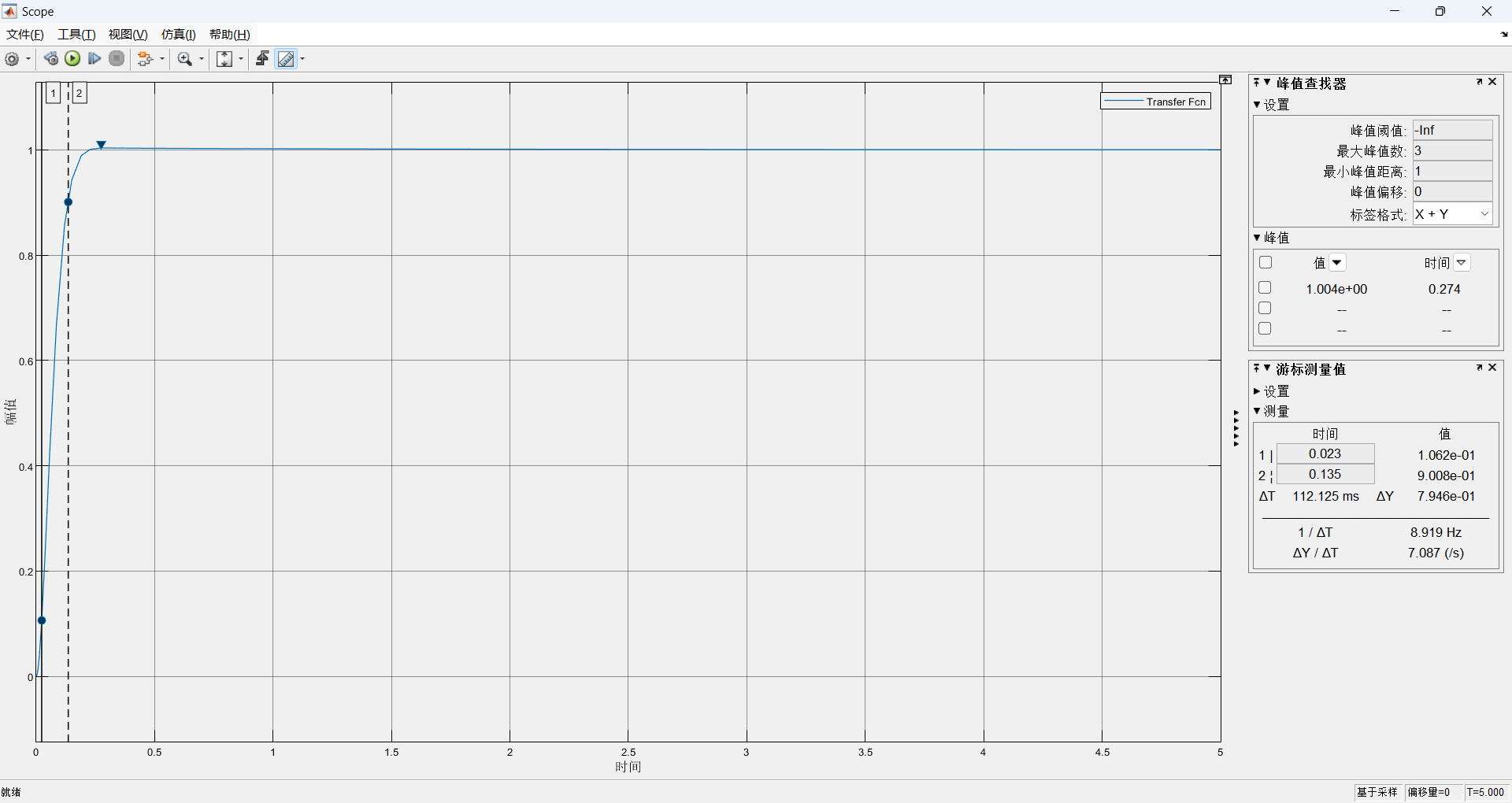
参数设置为Kp=500,Ki=300,Kd=25,输出效果如下。
二、利用PID控制器仿真
将比例,微分,积分三个环节,换为simulink自带的PID控制器,框图如下。
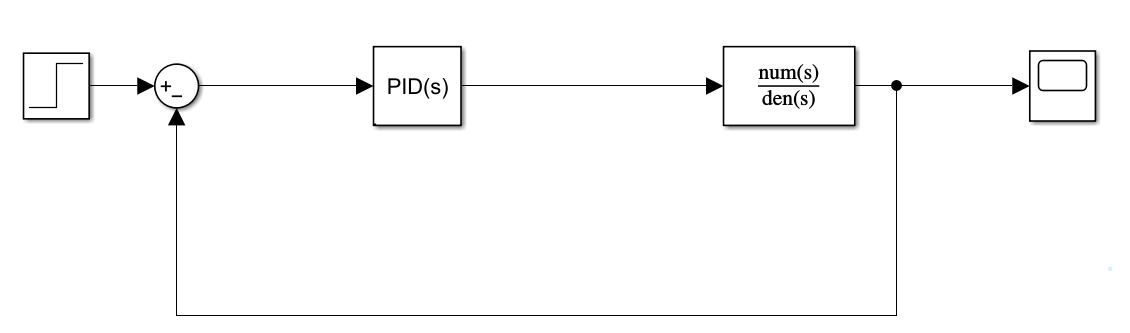
并将参数设置为与原来相同的。
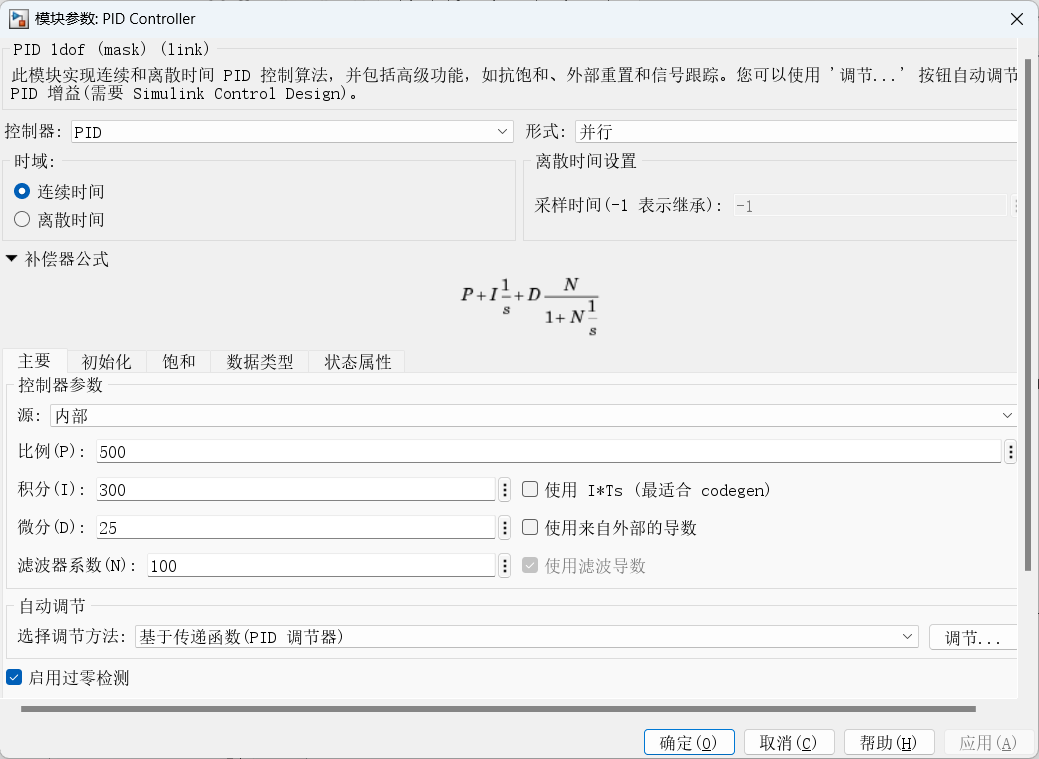
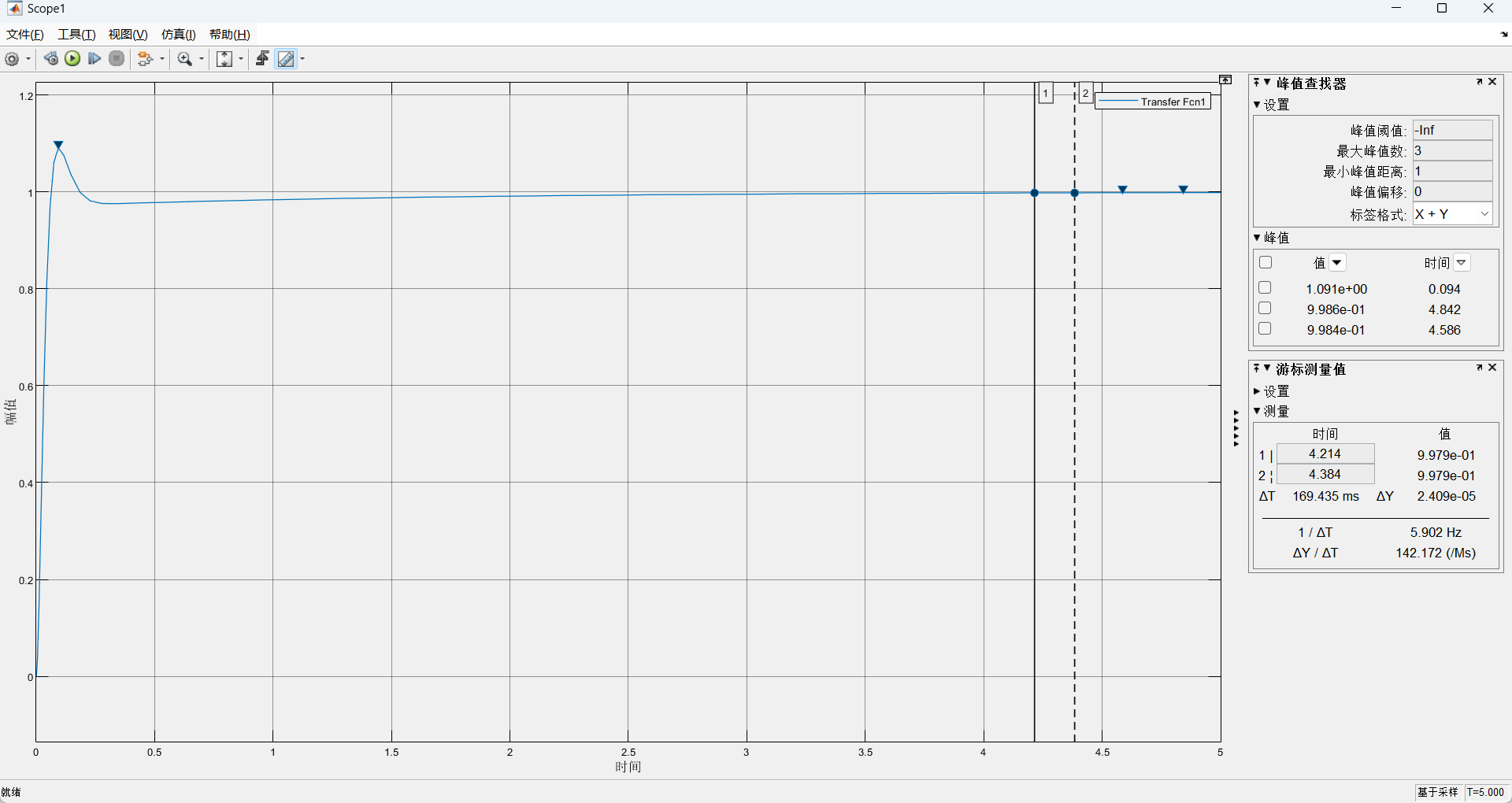
系统仿真结果如下,与原来的输入并不相同,有了较大的超调量,但是上升时间更短了。我也不清楚出现这种情况的原因。
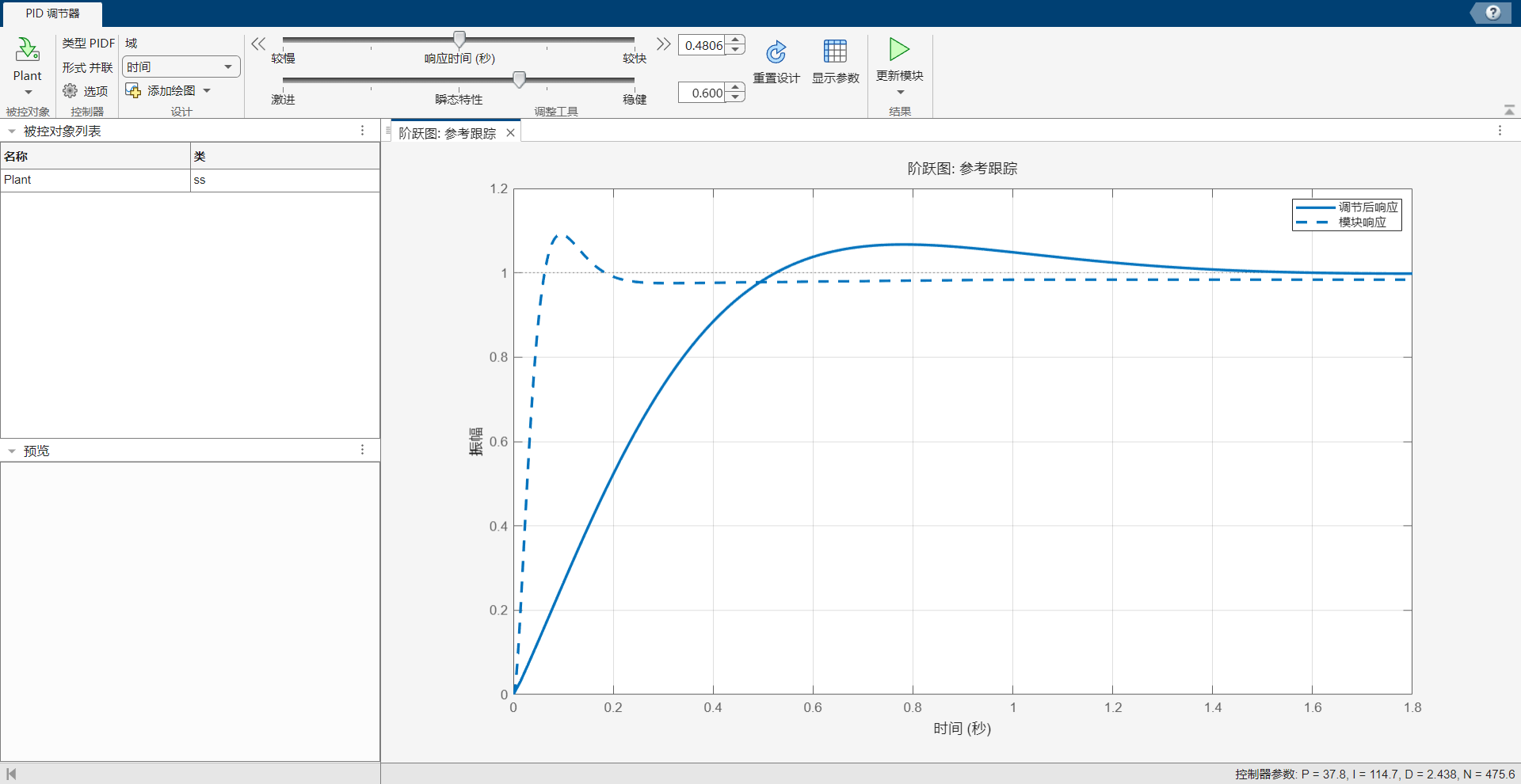
三、利用PID调节器整定
双击PID控制器,点击其中的调节按钮,即可启动PID调节器。虚线为原来系统的响应,实线为调整后的响应,通过调节响应时间与瞬态特性,调整输出波形。
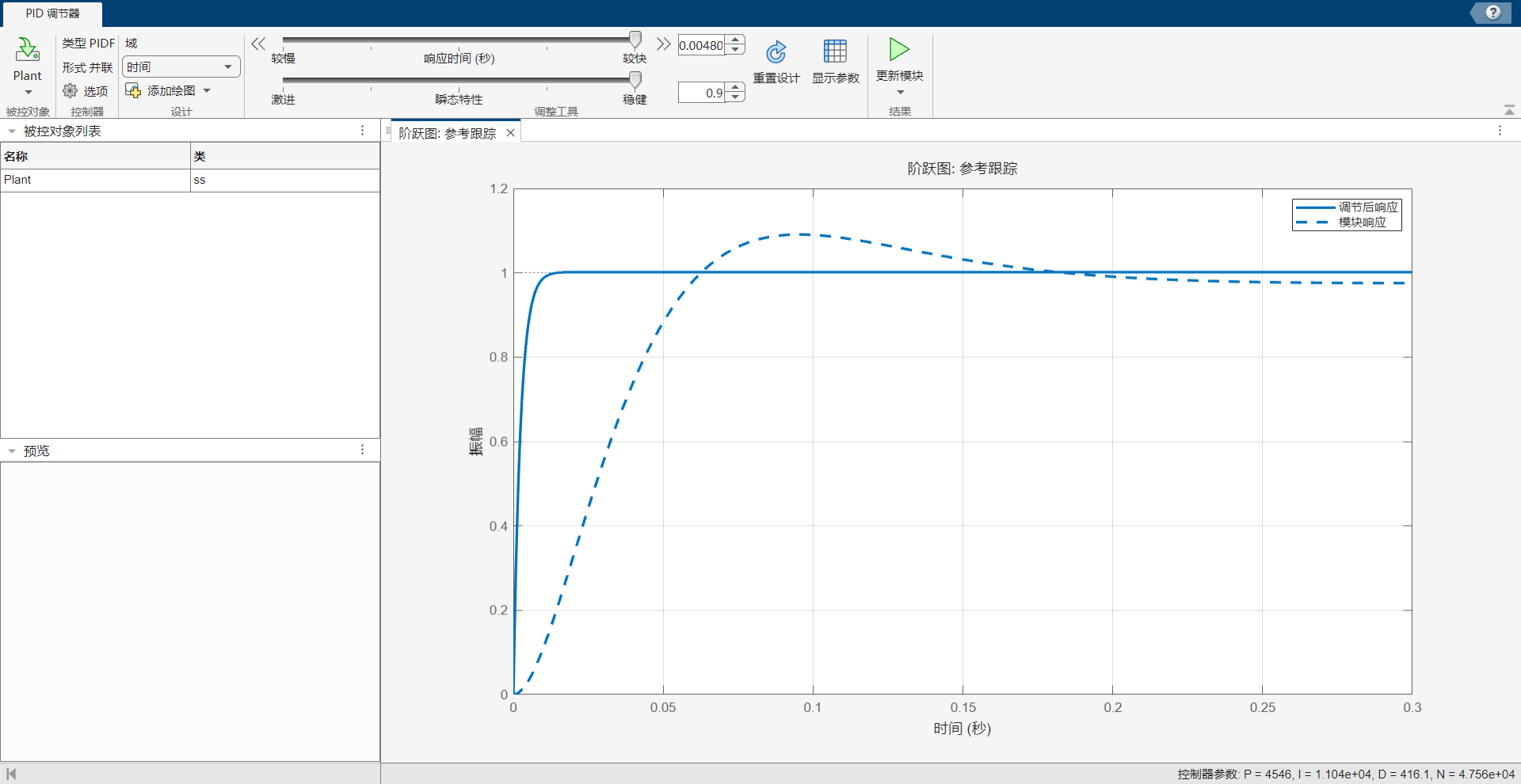
调整完的输出图形如下,没有超调量、极短的调节时间。
点击【显示参数】按钮,可查看此时与之前系统各项参数的对比。不过多了一个N值,不太理解这个值的含义。
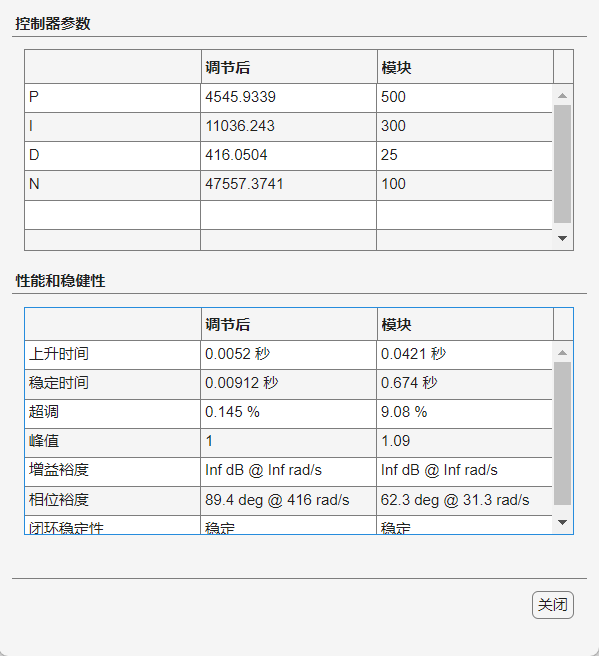
用PID调节器可大大缩短控制器的整定时间。
实际中,得到整定参数后,即可写入到实际的控制器中。