基于EcuBus-Pro实现LIN UDS升级
文章目录
- 前言
- 1.搭建环境
- 1.1 开发板
- 1.2 CAN卡
- 2.工程配置
- 2.1 基础配置
- 2.2 服务配置
- 2.2.1 DiagnosticSessionControl(诊断会话控制)($10)服务
- 2.2.2 ECUReset(ECU 复位)($11)服务
- 2.2.3 SecurityAccess(安全访问)($27)服务
- 2.2.4 RoutineControl(例程控制)($31)服务
- 2.2.5 文件传输(包含$34、$35、$36服务)
- 2.3 流程配置
- 3.功能实现及测试
- 3.1 准备工作
- 3.2 脚步编写
- 3.3 测试效果
- 4.数据解析
- 5.工程分享
前言
- 基于EcuBus-Pro实现CAN UDS升级
之前分享了基于EcuBus-Pro实现了CAN UDS bootloader功能的文章,链接如上。当时手上没有合适的LIN工具以及开发板,所以LIN UDS bootloader功能的相关文章一直延期。
最近有在支持客户使用纳芯微的NSUC1612,该芯片自带ROM boot,并且符合LIN UDS协议,正好借这个机会,分享下如何基于EcuBus-Pro实现LIN UDS bootloader。
如果想要了解NSUC1612,可以点击下方链接进行查看:
- 单芯片驱动,解锁汽车智能执行器更高性价比!纳芯微推出全集成电机驱动SoC NSUC1612
1.搭建环境
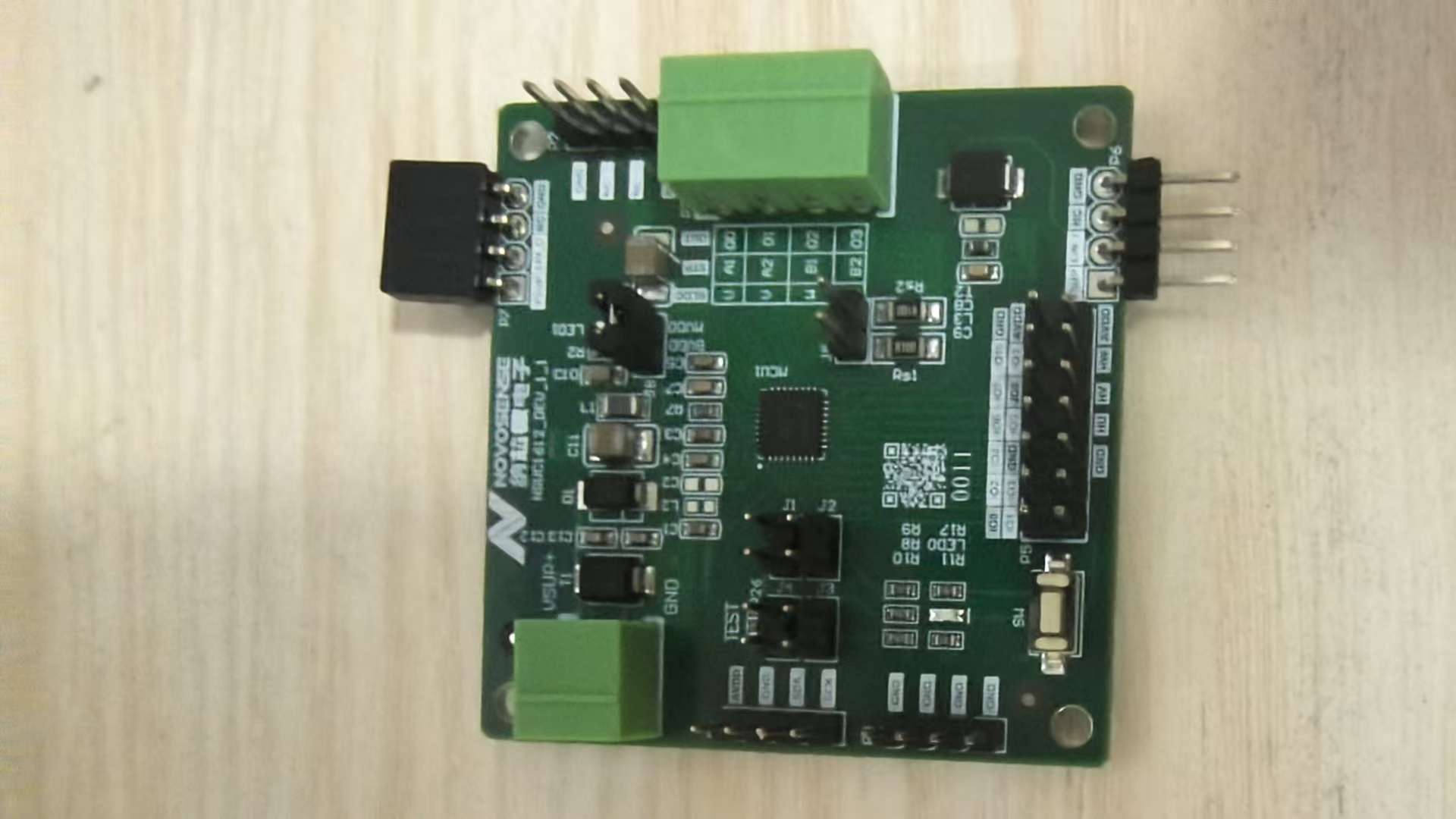
1.1 开发板
使用纳芯微官方提供的NUSC1612评估板,如下所示:
1.2 CAN卡
使用EcuBus-Pro推荐的LinCable,介绍链接如下:
- https://app.whyengineer.com/zh/docs/um/hardware/lincable.html
2.工程配置
2.1 基础配置
- 新建一个只有诊断帧的LDF文件,并导入数据库。
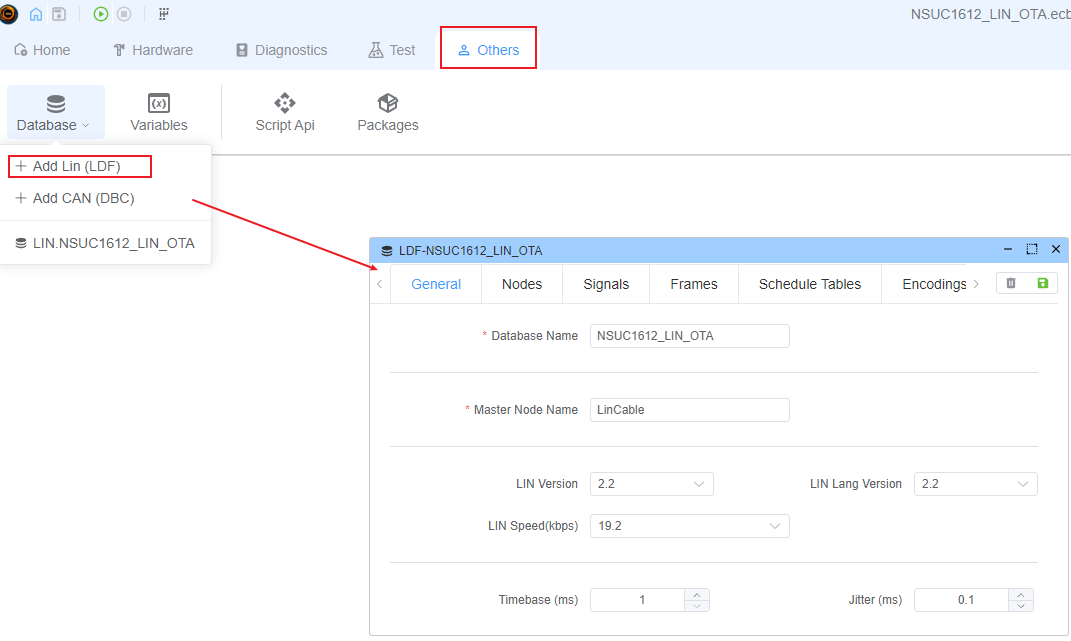
如下是一个LDF文件参考示例:
LIN_description_file;
LIN_protocol_version = "2.2";
LIN_language_version = "2.2";
LIN_speed = 19.2 kbps;Nodes {Master: LinCable, 1 ms, 0.1 ms ;Slaves: ;
}Signals {
}Diagnostic_signals {MasterReqB0: 8, 0 ;MasterReqB1: 8, 0 ;MasterReqB2: 8, 0 ;MasterReqB3: 8, 0 ;MasterReqB4: 8, 0 ;MasterReqB5: 8, 0 ;MasterReqB6: 8, 0 ;MasterReqB7: 8, 0 ;SlaveRespB0: 8, 0 ;SlaveRespB1: 8, 0 ;SlaveRespB2: 8, 0 ;SlaveRespB3: 8, 0 ;SlaveRespB4: 8, 0 ;SlaveRespB5: 8, 0 ;SlaveRespB6: 8, 0 ;SlaveRespB7: 8, 0 ;
}Frames {
}Diagnostic_frames {MasterReq: 0x3c {MasterReqB0, 0 ;MasterReqB1, 8 ;MasterReqB2, 16 ;MasterReqB3, 24 ;MasterReqB4, 32 ;MasterReqB5, 40 ;MasterReqB6, 48 ;MasterReqB7, 56 ;}SlaveResp: 0x3d {SlaveRespB0, 0 ;SlaveRespB1, 8 ;SlaveRespB2, 16 ;SlaveRespB3, 24 ;SlaveRespB4, 32 ;SlaveRespB5, 40 ;SlaveRespB6, 48 ;SlaveRespB7, 56 ;}
}Node_attributes {
}Schedule_tables {
}Signal_encoding_types {
}Signal_representation {
}
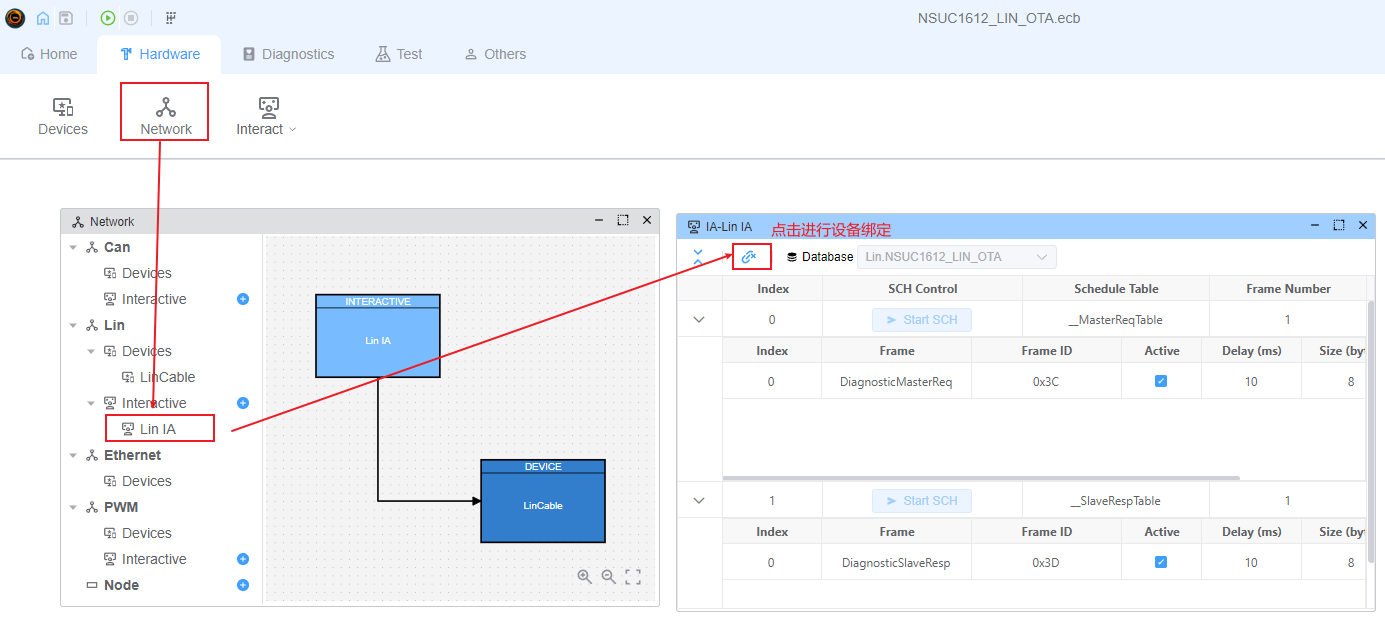
- 新建device并导入数据库的LDF,然后保存配置。
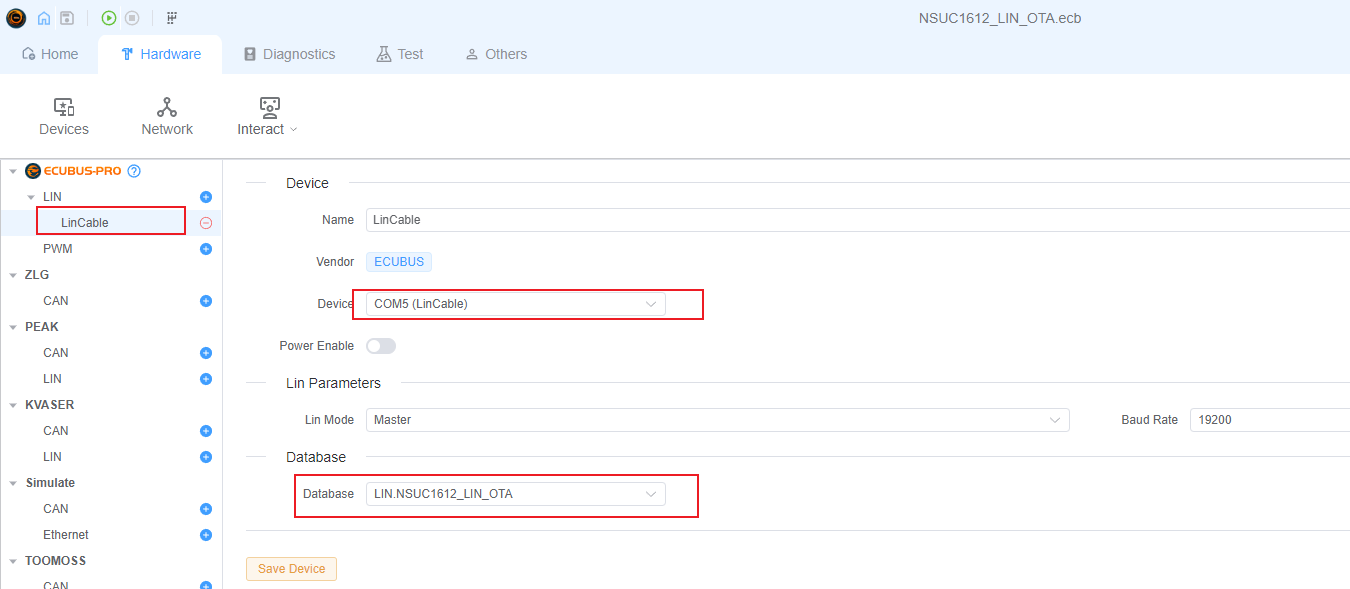
- 在network界面新建一个LIN IA并和device绑定。
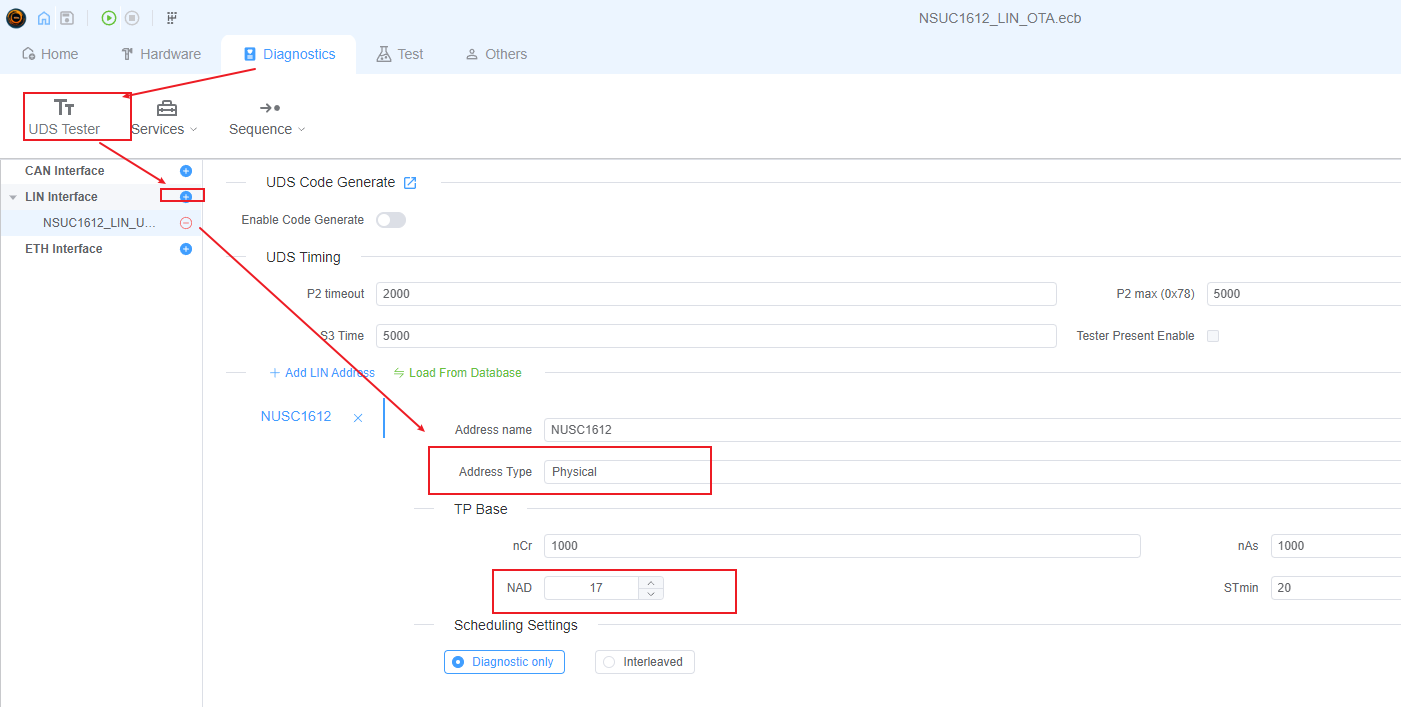
- 转到诊断菜单,设置寻址方式和NAD,如果不确定NAD,可以使用广播地址,即0x7F。
2.2 服务配置
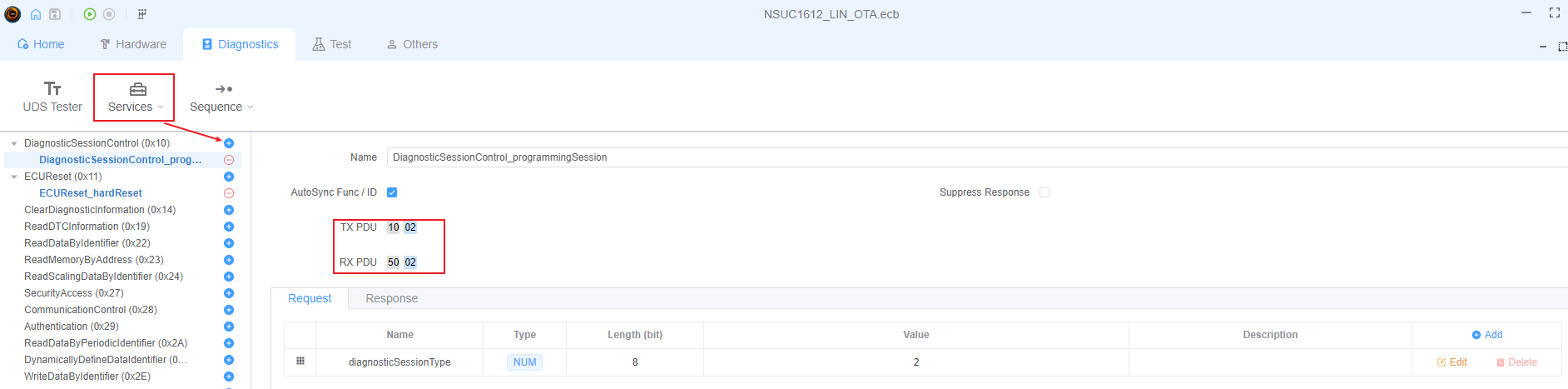
2.2.1 DiagnosticSessionControl(诊断会话控制)($10)服务
- 进入编程会话的配置如下:
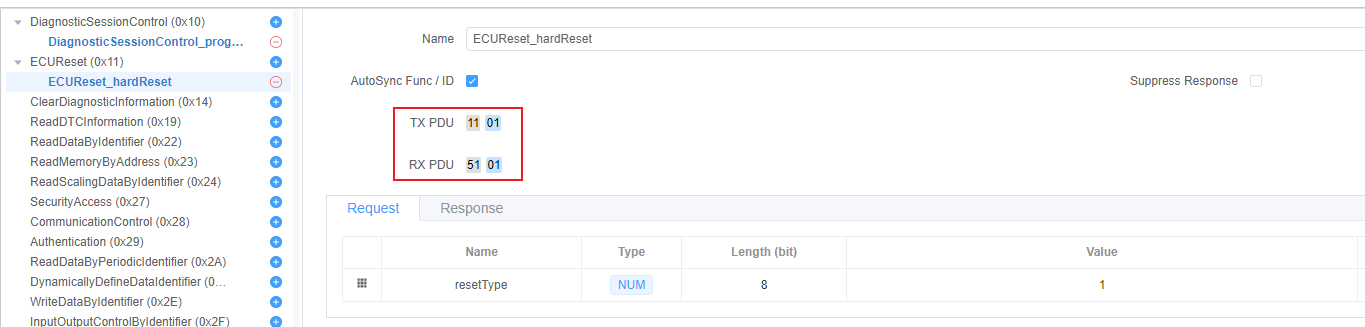
2.2.2 ECUReset(ECU 复位)($11)服务
- 硬件复位的配置如下,这里使用硬件复位。
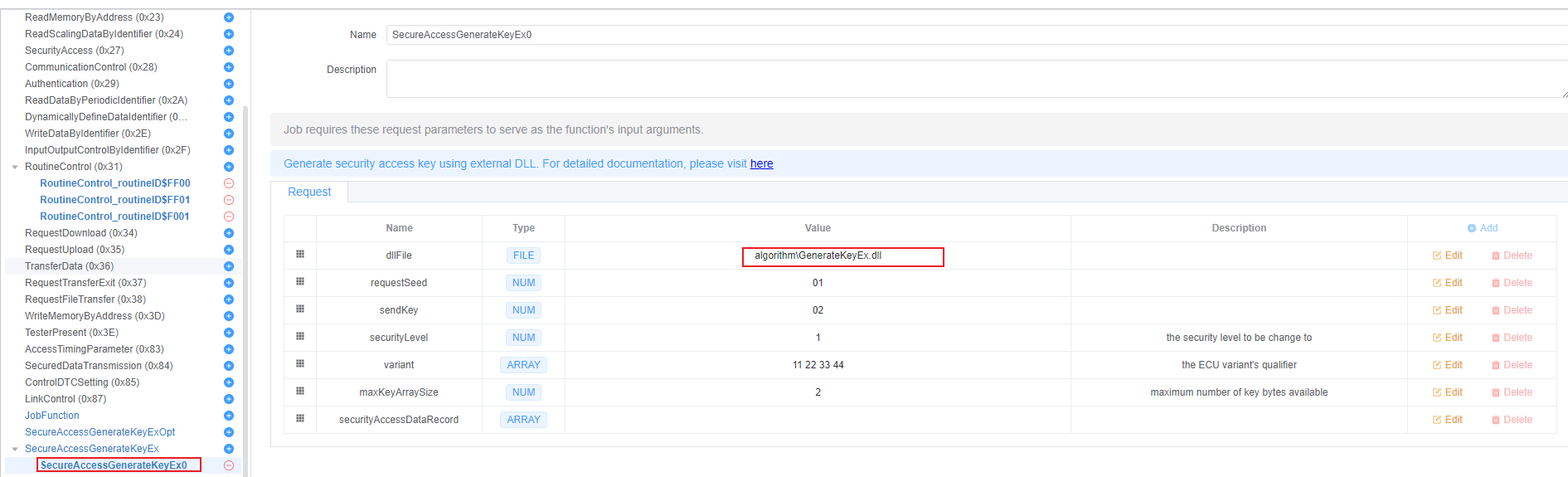
2.2.3 SecurityAccess(安全访问)($27)服务
- EcuBus-Pro对$27服务增加了配置,可以通过导入DLL文件的方式,避免使用脚本,配置如下:
文末网盘链接里System32文件夹的两个DLL,如果自身电脑C盘同名文件夹没有,需要复制过去,否则algorithm文件夹的GenerateKeyEx.dll无法被正确加载。
目前提供的DLL针对的是出厂默认配置的NSUC1612,实际使用时需要加载符合产品加密算法的DLL。
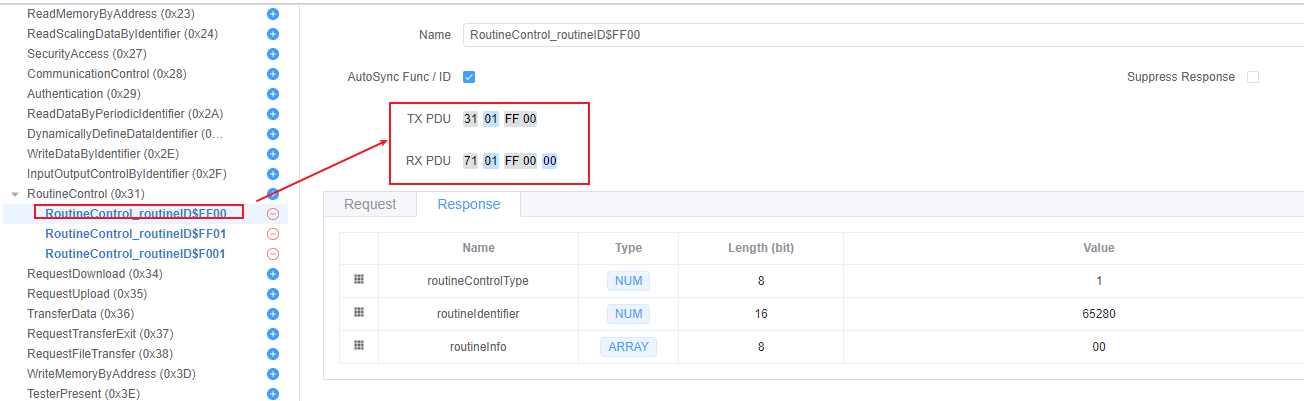
2.2.4 RoutineControl(例程控制)($31)服务
- RoutineID为0xFF00的配置如下,0xFF00用于通知ECU节点擦除Flash。
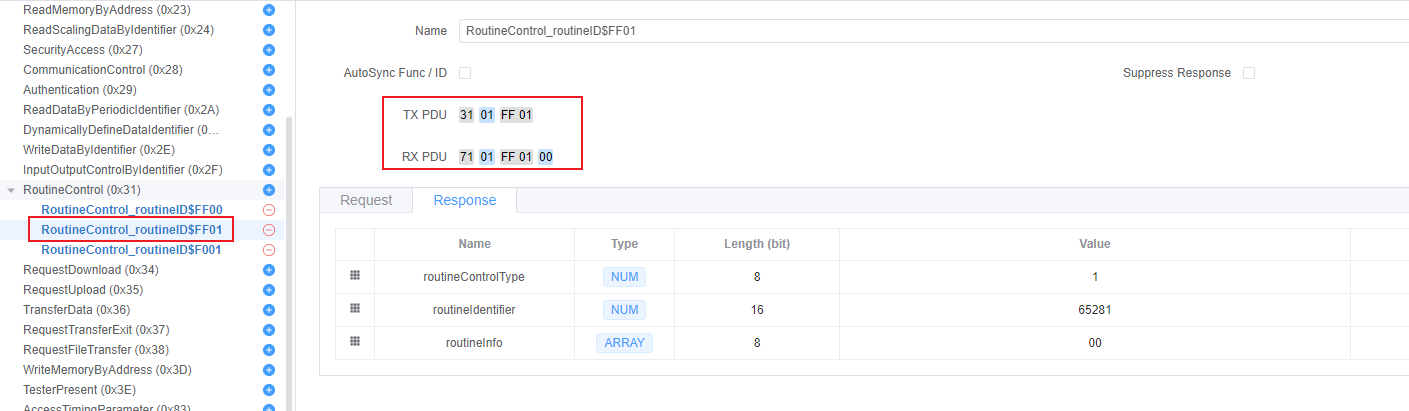
- RoutineID为0xFF01的配置如下,0xFF01用于通知ECU节点检查编程依赖。
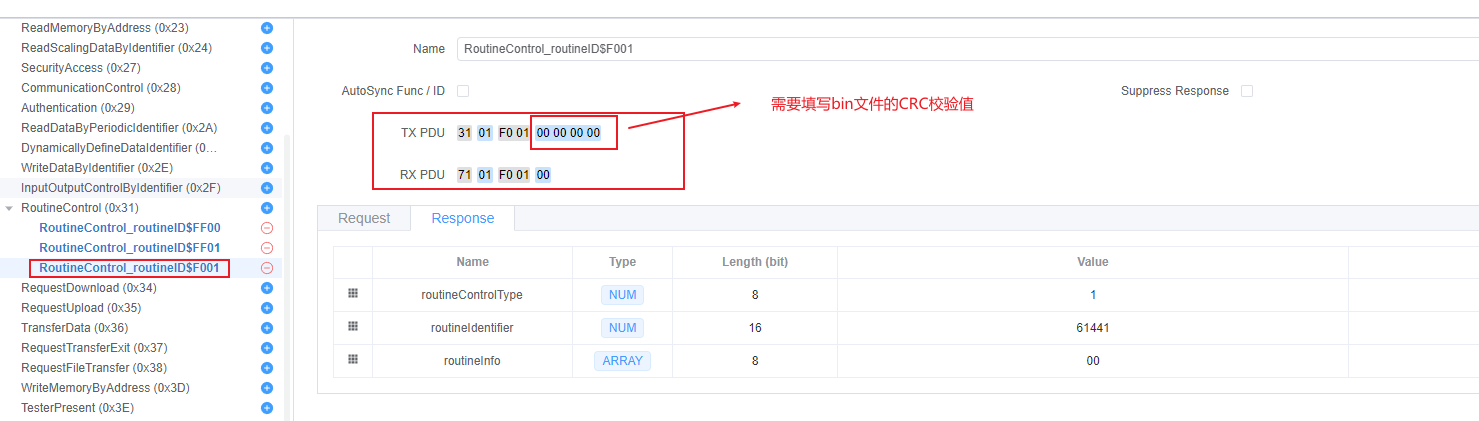
- RoutineID为0xF001的配置如下,0xF001用于通知ECU节点检查内存完整性,主要是传输bin文件的CRC校验值,目前还需要脚本配合。
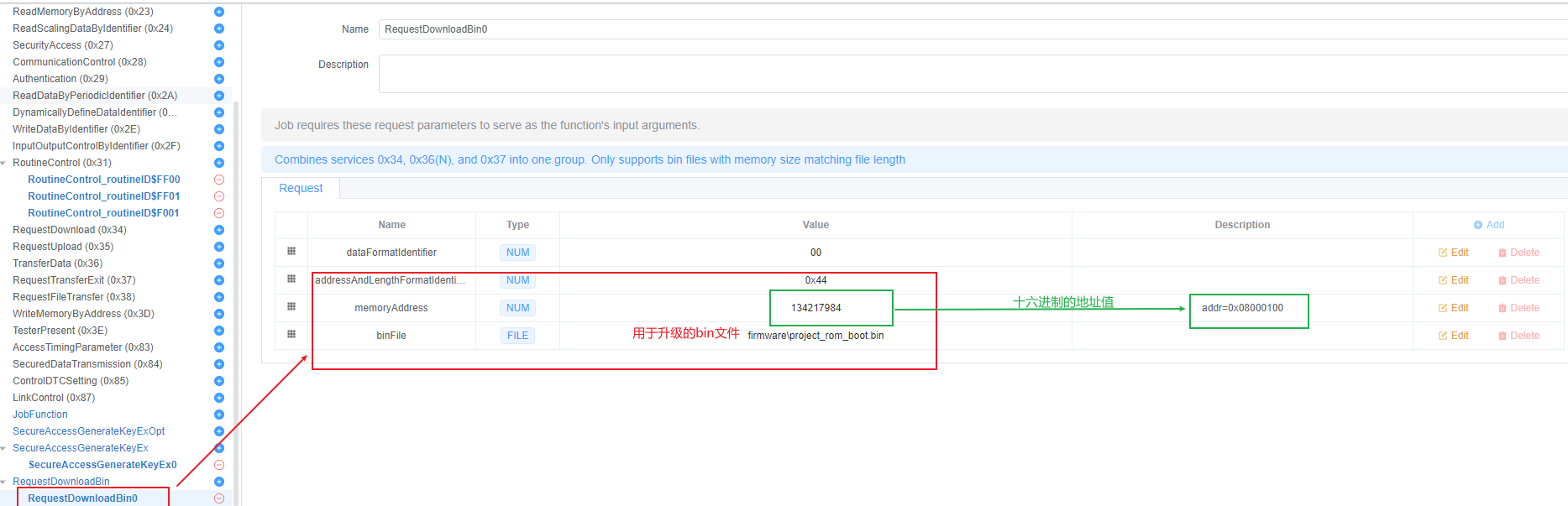
2.2.5 文件传输(包含$34、$35、$36服务)
- EcuBus-Pro对$34、$35、$36服务进行了整合,不需要脚本配合就可以实现bin文件传输,配置如下:
2.3 流程配置
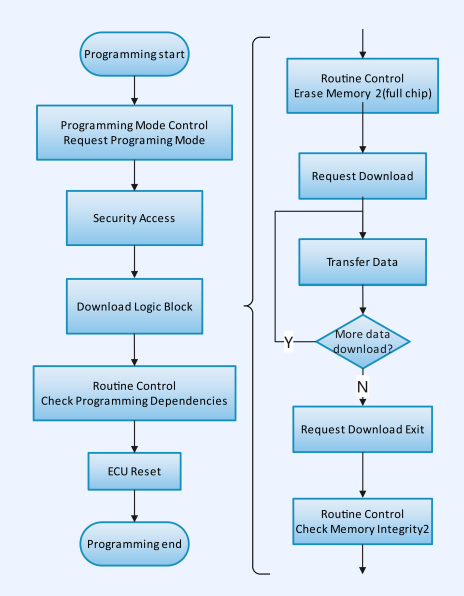
整个LIN UDS升级的流程配置如下图:
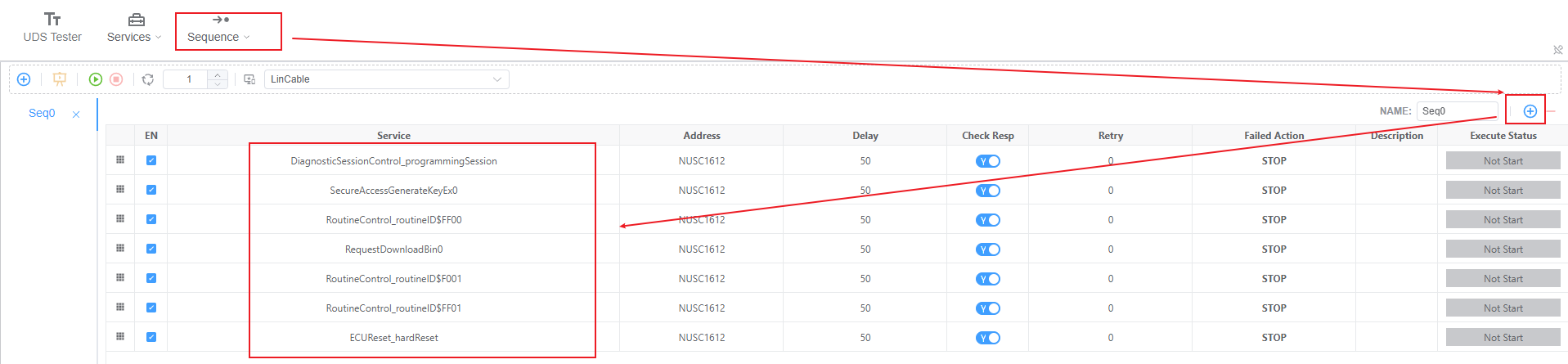
整个升级流程相比CAN UDS精简了一些,流程图如下,详细过程就不赘述了。
3.功能实现及测试
3.1 准备工作
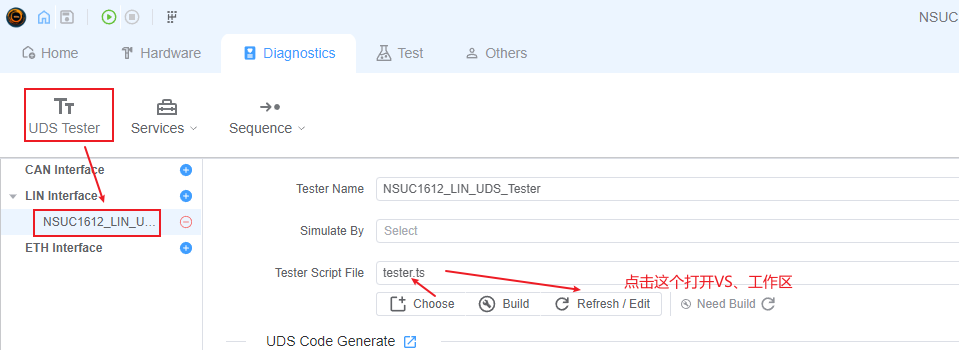
- 在工程所在目录新建一个ts文件;
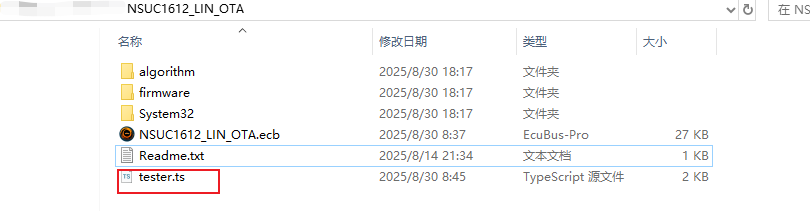
- 将升级需要用到的文件放到工程所在目录;

- 在UDS Tester加载该脚本文件,并打开vs code进行脚本编写;
3.2 脚步编写
该TS脚本主要实现的功能为:
- 读取需要升级的bin文件
- 按照约定好的算法计算出整个bin文件的校验值
- 将校验值通过$31服务传输给ECU
整个脚本文件的内容如下:
// 导入Node.js内置模块
import fs from 'fs/promises' // 文件系统模块的异步版本,用于读取文件
import path from 'path' // 路径处理模块,用于构建文件路径// 导入ECB模块中的CRC和DiagRequest类
import { CRC, DiagRequest } from 'ECB'// 初始化ECU测试程序
Util.Init(async ()=>{// 构建固件文件的完整路径// 使用环境变量PROJECT_ROOT作为基础路径,拼接firmware目录和project_rom_boot.bin文件名const fw=path.join(process.env.PROJECT_ROOT,'firmware','project_rom_boot.bin')// 异步读取固件文件内容const content=await fs.readFile(fw)// 创建CRC32_JAMCRC校验算法实例const crc= CRC.buildInCrc('CRC32_JAMCRC')// 计算固件文件内容的CRC32校验值const crcValue=crc.computeBuffer(content)// 创建诊断请求服务// 使用'NSUC1612_LIN_UDS_Tester.RoutineControl_routineID$F001'作为服务标识const service=DiagRequest.from('NSUC1612_LIN_UDS_Tester.RoutineControl_routineID$F001')// 设置诊断服务的参数// 将计算得到的CRC值设置为'routineControlOptionRecord'参数的值service.diagSetParameterRaw('routineControlOptionRecord',crcValue)// 执行服务变更,发送诊断请求await service.changeService()
})
3.3 测试效果
工程的测试情况如下:

4.数据解析
- 基于NXP例程学习CAN UDS刷写流程
之前借助EcuBus-Pro的log数据分析过CAN UDS刷写流程,如上链接。LIN的UDS刷写流程和CAN UDS刷写流程类似,有几点的细微差异。
- LIN的NAD都是放在数据段的第一个字节,整个传输层的格式如下:
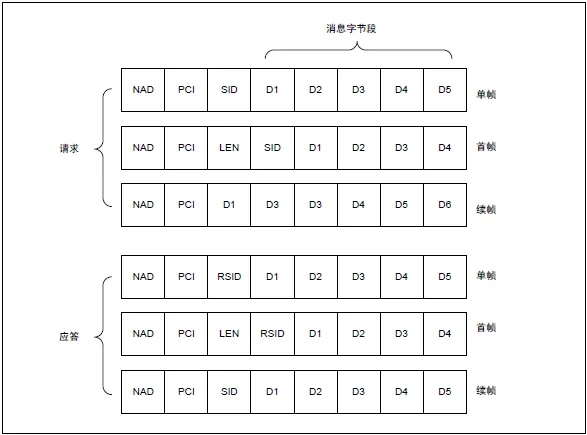
-
在执行UDS协议时,LIN的数据段都是8个字节,不足8个字节会使用0xFF填充,校验和使用标准型校验和。
-
LIN的UDS协议不需要流控帧,因为不管是请求还是应答,都是主机发起。
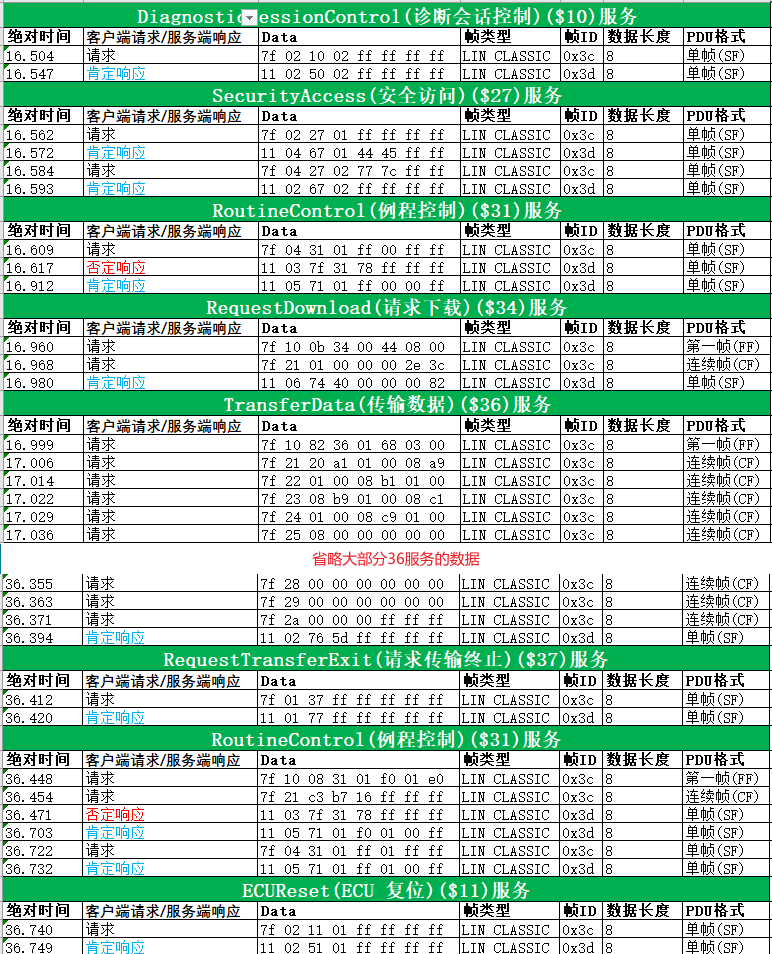
该工程的数据log解析如下:
5.工程分享
如上工程作者已打包上传至百度网盘,下载链接如下(后续会集成到EcuBus-Pro的自带例程中):
- 链接:https://pan.baidu.com/s/11GUnTXkbiV0md370iONcBA
- 提取码:m4p9